- Registration
- 서로 다른 좌표계 또는 서로 다른 장비로부터 얻은 두 개의 mesh data 또는 point cloud를 하나의 좌표계로 변환 시기는 것이다.
- 예를 들어, 3d 광학식 스캐너로부터 부분적으로 수차례에 걸쳐 얻은 데이터들 간의 정합을 통해 완성된 하나의 모델을 얻을 수 있거나, 수술 전 ct로부터 얻은 데이터와 수술 후 ct로 부터 얻은 데이터를 비교하기 위해 두 데이터 간의 정합(registration)이 필요하다.
- registration은 3차원 역공학 및 의공학 분야에서 매우 중요하게 다루어지는 기술로, VTK에서는 source와 target 데이터에 point ID 순서대로 1:1 매칭하는 vtkLandMarkTransform 클래스, 최근 접점을 검색하고 매칭해 변환 후 다시 최근 접점을 업데이트 해 변환을 반복하는 Iterative Closest Point(ICP) 기법을 구현한 vtkIterativeClosestPointTransform 클래스가 있다.
-
vtkLandMarkTransform은 회전행렬, 이동벡터와 변환 행렬을 계산하는 방식으로, 수식으로 풀리는 문제이므로 처리 속도가 빠르다
-
ICP 기법은 source데이터에서 target의 최근 접점을 찾아 매칭한 후, 수식을 풀어 변환행렬을 구하고 source 데이터를 얻어진 변환행렬로 업데이트한 후, 다시 최근 접점을 찾아 매칭하며 이 과정을 계속 반복한다.
- 최근 접점을 찾는 과정에서 계산 시간이 많이 소요되며 대응되는 점을 얼마나 정확하게 매칭해주느냐에 따라 그 정밀도가 결정된다.
-
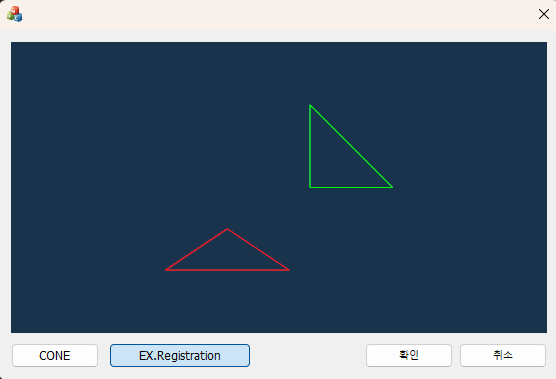
결과 1(vtkLandMarkTransform)
-
-
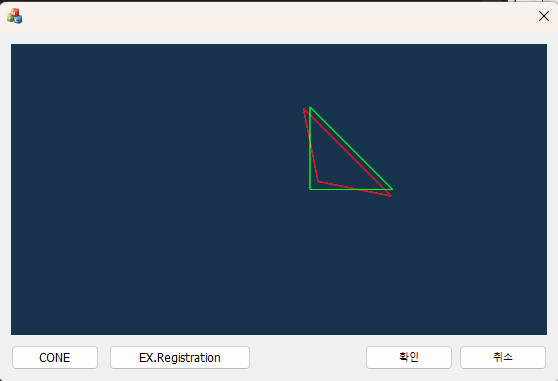
결과 2(vtkIterativeClosestPointTransform.h)


공부하자