2차원 변환
Transformation (변환)
좌표/벡터를 다른 좌표/벡터로 매핑
어파인 변환
1차 함수(Linear Functions)로 제한
평행 이동도 포함되어야 하기에 호모지니어스 좌표 표현 도입
물리 시뮬레이션의 기초
-
직선을 유지하는 성질
변환 전에 선분이라면 변환 후에도 선분 -
선분 전체의 모든 점을 변환할 필요가 없음
선분은 두 꼭짓점을 이은 것, 선분의 꼭짓점만 변환
변환한 꼭짓점을 다시 연결하면 선분 전체가 변환된 것과 동일함 -
Rigid Body (강체)
형태가 고정된 물체
회전/평행이동 가능 -
Non-Rigid Body
물체의 크기/모양에 변화 가능
스케일링/기울임
2D 기본 변환
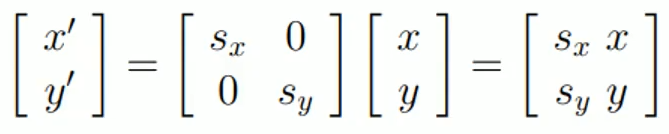
2D 스케일링
물체의 크기를 확대하거나 축소하는 연산
모든 점들에 동일한 scaling matrix 적용
2D 쉬어링
물체를 기울이는 연산
-
2D Horizontal Shear
주어진 x좌표에 y좌표와 비례하는 값을 더하면, 원점에서 멀어질 수록 x축 방향으로 기울어짐

-
2D Vertical Shear
y축 방향으로 기울어짐

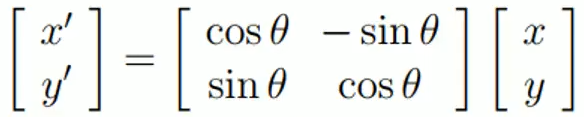
2D 회전
원점을 기준으로 좌표를 회전하는 연산
CCW(반시계방향)으로 회전
시계방향으로 θ만큼 회전 시, 반시계방향으로 -θ만큼 회전 (= 2π-θ)
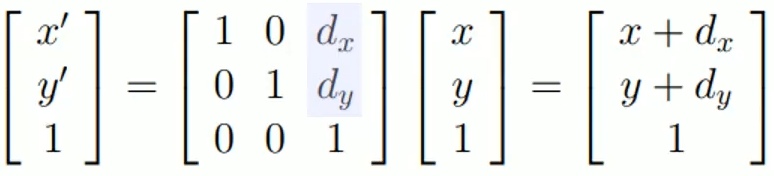
2D 평행이동
주어진 좌표를 벡터만큼 이동
행렬로 표현하기 위해 호모지니어스 좌표 도입
3D 호모지니어스 좌표
- 3D 좌표
= 4D 호모지니어스 좌표
(x,y,z) -> (x,y,z,1) = (wx,wy,wz,w) - 4D 좌표
= 3D 호모지니어스 좌표
(x,y) -> (x,y,1) = (wx,wy,w)
2D 어파인 변환 = 3D 행렬(3x3) 연산
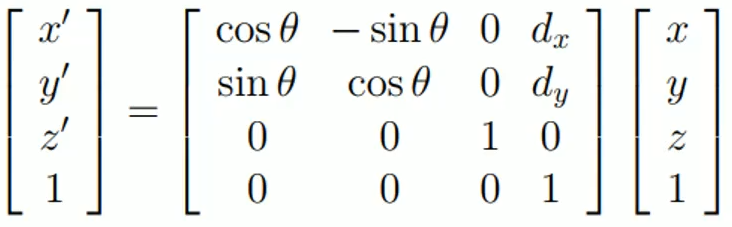
2D 변환의 합성
회전 후 평행이동 연산의 행렬식
여러 연산을 미리 계산하여 합성하면 순서대로 연산한 것과 같은 결과가 나옴

행렬 곱셈의 순서
변환 행렬은 매핑 과정이라 곱셈 순서에 따라 다른 결과가 나옴
회전 후 평행이동과 평행이동 후 회전은 전혀 다른 연산 결과가 나타남

Pivot Point 기준의 회전
2D 회전은 원점 중심으로 회전해버림
Pivot: 회전 중심이 되는 고정점
- Pivot Point를 원점으로 평행이동
- 원점을 기준으로 회전
- 원점을 다시 Pivot Point로 평행이동
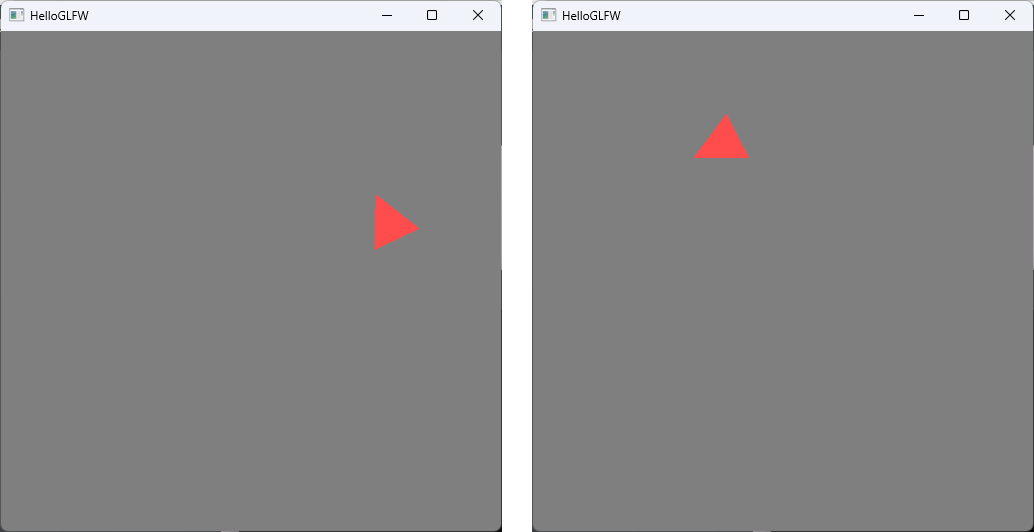
orbit 프로그램
원형 궤도를 도는 우주선을 그리는 프로그램
우주선의 방향은 바뀌어야 함
- vertex shader 프로그램
uMat 행렬에 회전 후 평행이동 행렬식 적용 (OpenGL은 3D이므로 4x4 행렬 사용)
#version 330 core
in vec4 aPos; // vertex position: attribute
in vec4 aColor; // vertex color: attribute
out vec4 vColor; // varying color: varying
uniform mat4 uMat; // matrix: uniform
void main(void) {
gl_Position = uMat * aPos; // transformation
gl_Position.z *= -1.0F; // negation
vColor = aColor;
}- vertex 배열
우주선은 삼각형 하나로 표현
glm::vec4 vertPos[] = { // small triangle
{ 0.0F, 0.1F, 0.0F, 1.0F }, // v0
{ -0.1F, -0.1F, 0.0F, 1.0F }, // v1
{ 0.1F, -0.1F, 0.0F, 1.0F }, // v2
};
glm::vec4 vertColor[] = { // all red
{ 1.0F, 0.3F, 0.3F, 1.0F, },
{ 1.0F, 0.3F, 0.3F, 1.0F, },
{ 1.0F, 0.3F, 0.3F, 1.0F, },
};- updateFunc()
mat행렬에 회전 후 평행이동 행렬식 저장
// 단위행렬
GLfloat mat[16] = {
1.0F, 0.0F, 0.0F, 0.0F,
0.0F, 1.0F, 0.0F, 0.0F,
0.0F, 0.0F, 1.0F, 0.0F,
0.0F, 0.0F, 0.0F, 1.0F,
};
const float radius = 0.6F;
float theta = 0.0F;
system_clock::time_point lastTime = system_clock::now();
void updateFunc(void) {
// update the rotation angle
system_clock::time_point curTime = system_clock::now();
milliseconds elapsedTimeMSEC = duration_cast<milliseconds>(curTime - lastTime); // in millisecond
theta = (elapsedTimeMSEC.count() / 1000.0F) * (float)M_PI; // 2초당 1회전
// calculate the matrix
mat[0] = cosf(theta); mat[4] = -sinf(theta);
mat[1] = sinf(theta); mat[5] = cosf(theta);
mat[12] = radius * cosf(theta);
mat[13] = radius * sinf(theta);
}- drawFunc()
uniform register의 uMat에 mat 행렬값 대입
void drawFunc(void) {
...
GLuint locMat = glGetUniformLocation(prog, "uMat");
glUniformMatrix4fv(locMat, 1, GL_FALSE, mat); // false면 열 우선방식으로 저장
glDrawArrays(GL_TRIANGLES, 0, 3);
...
}원 궤도를 그리며 움직이는 삼각형이 출력