Intro
CTDE framework의 등장 배경
1) Agent들의 behaviour change로 인한 env의 불안정성
2) Other agent action에 의한 가짜 reward로 인한 학습 불안정성
을 타파하기 위해 training은 안정화 시키고, 각 agent의 decentralized execution 능력은 최대로 하기 위한 방안
Value function factorization 방식
가정)
1) 각 agent의 optimal action 의 joint는 전체 optimal joint action을 형성한다.
2) 전체 return 은 각 agent의 utility function으로 분해할 수 있다.
한계)
utility 의 expectation을 구하는데 초점을 맞추다보니 전체 return이 갖고 있는 additional 정보를 잃어버리게 된다.
예) VDN, QMIX 등
Distributional RL과 Value function factorization 방식과 비교해 한계
방식)
한개의 single Q value를 scalar 형태로 return하는 것이 아닌 return의 probability distribution을 반환한다.
Value function factorization을 이길 수 없는 이유)
1) individual global max(각 agent 의 optimal의 모임이 전체의 optimal…) 이 distributional 하게 유지되어야 함
2) 전체 return의 probability distribution을 factorization 하는 방식
- 하지만 이 방식은 전체 reward가 갖고 있는 additional information을 뽑아낼 수 있는 potential을 갖고 있음!
Intro
CTDE 등장 배경
1) 다른 agent 들에 의한 non-stationary env (policy 가 계속 변함)
2) spurious(가짜) reward signal
이중 value function factorization 이 큰 성공을 거둠
IGM(Individual Global Max) 아이디어에 기반
→ 각 agent 의 optimal action 집합은 optimal joint action과 동일하다
→ 이는 각 agent 개별의 분리된 utility function 의 존재를 가능하게 함
- 현재 알고리즘들이 이러한 utility function의 expectation에만 집중하고 있다는 점을 지적
지금까지 제시된 distributional RL 은 value function factorization과 잘 섞이지 않음
1) IGM을 distributional 형태로 유지하는 것
2) total return의 probability distribution을 individual utility로 factorize 하는 것
에서 오는 어려움으로 인해
이 둘을 섞을 수 있는 DFAC 알고리즘을 소개
1) Mean-shape decomposition → IGM을 깨지 않고 기존의 vlaue function factorization(VDN, QMIX)를 DFAC variant로 변형가능
2) Quantile Mixture → total return distribution을 individual utility distribution으로 나누는 역할
Background
S: global state, training 시에는 접근 가능하지만 execution에는 참고 불가
K: index of an agent
O: observation 집합
H: action-observation joint 집합
U: joint action 집합
이 논문에서는 stochastic policy를 다룸 // H를 conditional 로 갖는 policy로 인해 U가 결정됨

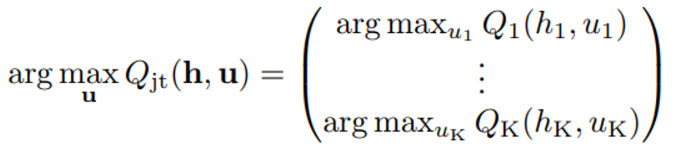
IGM 을 수식으로 나타내면 아래 수식과 같다
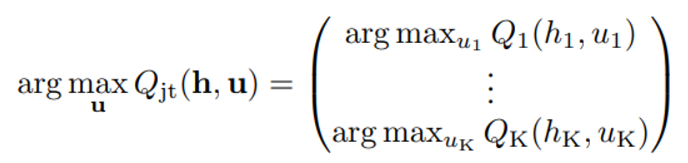
QMIX에서 봤던 가정 식과 동일하다!
→ 이 가정을 통해 각 agent의 utility function maximization 이 joint maximization과 동일하다는 결론을 얻을 수 있다.
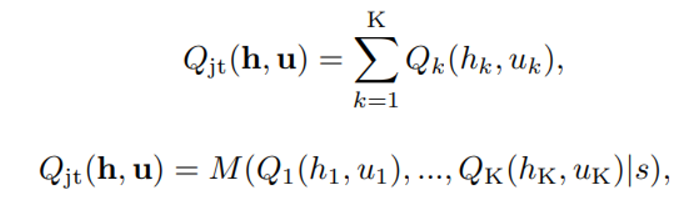
Value function Factorization method 에는 우리가 봤던 VDN, QMIX가 있으며 각각의 수식은 아래와 같다
IQN recap
기존과의 차이점
Inverse quantile function의 정의역을 equidistance로 설정하지 않고 [0,1] uniform random sampling을 통해서 자유도를 놉혔다.
이렇게 선정된 goal (w) 들은 아래와 같은 함수를 통해 embedding 된 후 state 와 element-wise 하게 embedding 된다
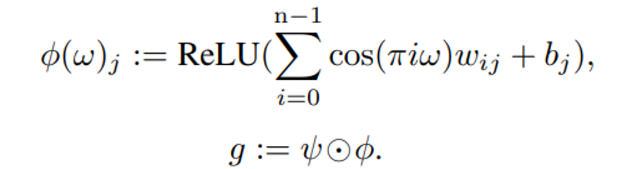
아래는 state embedding과 goal(w) embedding 의 element-wise interaction을 의미하며 결과값인 g는 quantile function의 결과값을 추정하는 역할을 한다.
전체 네트워크는 아래와 같은 loss function을 최소화하는 방향으로 학습되며

기존에 제시된 다른 distributional RL과 달리 expectation으로 Q-value 를 정하지 않고 random sampling을 통해 value function 값을 추정한다.

Network를 통한 quantile mixing 개념
위의 값들이 model parameter 일 때
위와 같은 방식으로 여러 quantile 들의 합으로 새로운 quantile 을 묘사할 수 있다. 이 때 좌변이 quantile function 의 properties를 만족시켜야 한다는 제한사항이 존재한다
DFAC Methodology
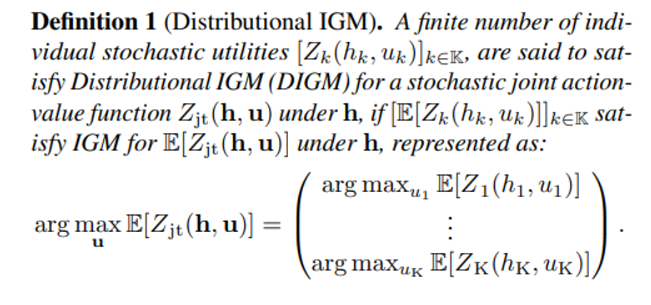
우리는 다음과 distributional value function 이 아래와 같은 조건을 만족할 때 Distributioal IGM, 즉 DIGM 이 성립한다고 정의한다.
하지만 conventional 한 Q function 의 factorization function 으로는 distributional value function 의 DIGM 조건을 만족시키는 factorize 결과를 얻을 수 없다!
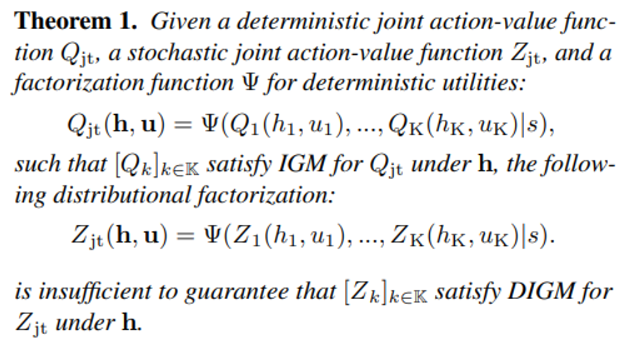
즉, 가 Q를 IGM 조건을 만족시키며 factorize 할 수 있는 함수라 했을 때 이 함수를 똑같이 distributional value function Z에 적용하는 것은 Z가 DIGM 조건을 만족하기에 충분하지 않다는 것이다!
이에 대응해 DFAC에서는 mean-shape decomposition을 아래와 같이 제안한다.
이를 통해 우리는 이라는 deterministic 한(variance = 0) 항과 뒤의 이라는 stochastic 한 항으로 Z를 분리할 수 있게 된다.
Definition 1에서 확인할 수 있듯이 DIGM 은 Z의 expectation 으로 이뤄져 있기 때문에 에 대해서는 정확한 factorization이, 에 대해서는 rough 한 factorization 이 허용된다(expectation 이 0이므로)
위와 같은 직관을 통해 DIGM을 만족하기 위한 충분조건의 factorization을 아래와 같이 고려할 수 있다.
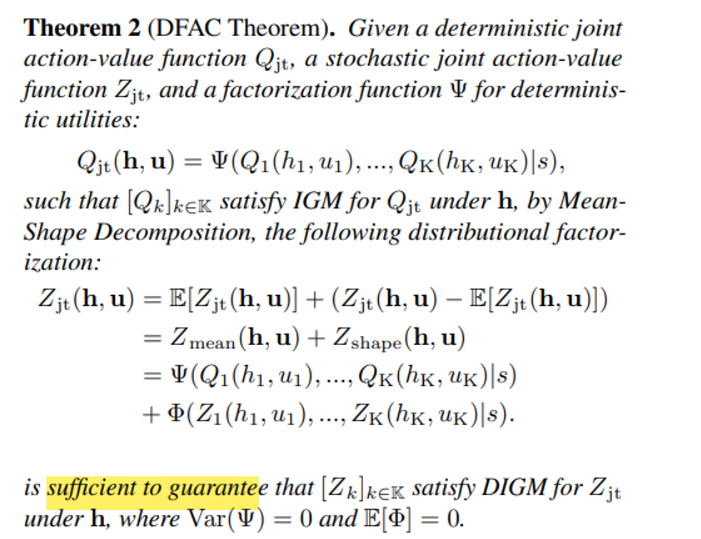
앞서 언급한 것과 같이 를 면밀하게 고르는 것이 IGM의 성립여부를 결정하며 phi 함수는 expectation 이 0인 이상 IGM 성립 여부에 큰 영향을 미치지 않는다.
(하지만 에 대한 것은 이미 VDN, QMIX 에서 본 것과 같이 conventional 한 Q-value function에 대한 factorization 으로부터 알 수 있다.)
그러므로 이어지는 내용에서 우리는 함수(과 연관)를 효과적으로 선정하는 방식에 대해 설명하도록 한다.
Theorem 3에서는 quantile function 이 다음과 같이 non-negative 한 model parameter를 통해 조합될 수 있다면 아래와 같이 quantile function 에 대응하는 Random Variable Z 가 존재한다고 한다.
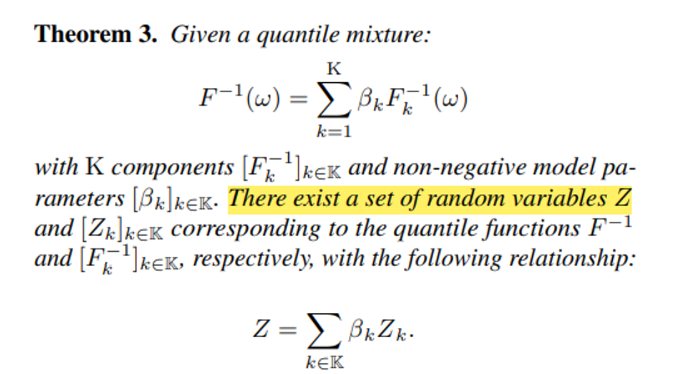
이는 IQN 모델을 사용하기 위한 응용이며 앞서 은 로 표현되었기 때문에 아래와 같이 factorization 이 가능하다 (expectation Z가 Q에 대응하는 모양)
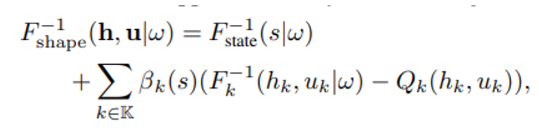
여기서 우변의 첫항인 은 QMIX 의 global state information 참고 항 같이 state info 를 training 과정에서 사용하기 위해 추가된 term으로 여겨진다.
위와 같은 과정을 통해 quantile function을 각 agent 의 individual utility 처럼 factorize 할 수 있게 되었으며 위의 내용은 여러 IQN 모듈의 종합으로 implement 되었다.
종합적인 architecture 모습은 아래와 같으며
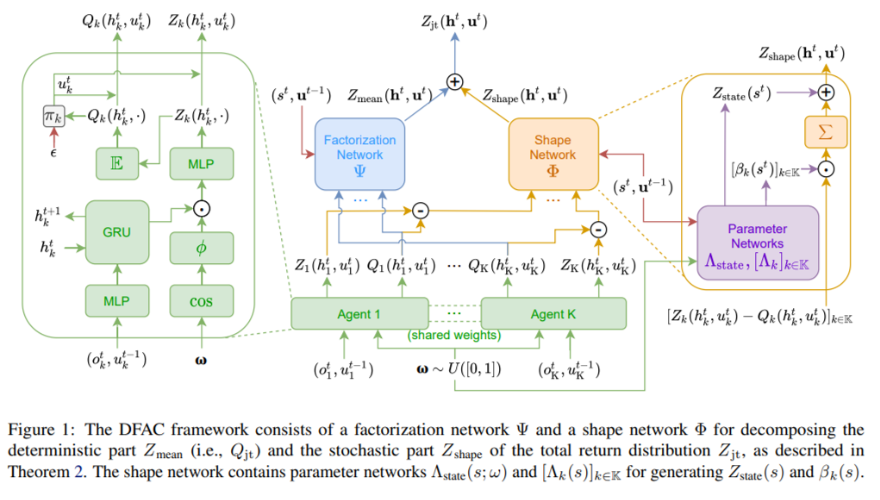
factorization network, agent 부분은 Z를 생성하는 것을 제외하면 QMIX와 비슷하고 shape network 는 윗 절의 후반부에서 설명한 내용들을 담고 있다. Z_state로 표현된 부분이 QMIX에서 second layer에 global_state를 통과한 FC layer를 첨가하는 부분을 모사한 것이라고 이해하면 편하다 .
