state 가 hypernetwork 지나는 이유
Q1 ~ Qn 에 대해 monotonic 하게 Q_tot 가 비례하는 것은 맞으므로 W 원소들이 양수인 것은 맞지만
state가 이 과정에 관여하는 과정에서는 monotonic 할 필요는 없으므로 hyperparameter를 통과하여 자율성을 증가시킨다.
그리고 state가 direct하게 mixing network에 섞이지 않는 이유는 state 정보가 non-monotonic 하게 Q_tot에 extra state information 을 제공할 이유가 있기 때문이다.
Background
기본적인 notation은 앞선 COMA 논문과 모두 동일함
앞서 등장했던 여러가지 RL 학습 방법에 대한 간략한 소개
-
DQN
replay memory 와 아래와 같은 loss function을 최소화 하는 것을 목표로하는 학습 방식을 의미한다.
target 함수 는 TD(0) 값으로 아래와 같은 estimation을 가지면 는 한 batch에 대해 계속 같은 parameter로 목표값을 제시하는 target network 를 의미한다. (이 network는 한 batch iteration 이후 parameter update를 진행하게 된다.)

-
DRQN - Deep Recurrent Q Learning
critic-actor 방식에서 actor에 대해 LSTM이나 GRU 같은 시계열 처리 network를 적용한 방식을 의미한다.
향 후 졸업논문을 위해 이 논문도 살펴봐야 할 것 같음 -
Independent Q-Learning
mutli-agent Learning의 한 종류이며 주어진 task를 single-agent 문제로 분해한 후 합친 방식으로 생각하는 framework를 제안하였다.
이 방식의 문제점은 한 agent가 학습을 할 때 다른 agent들의 policy가 바뀐다는 점을 간과해 non-stationarity 성질의 등장으로 수렴성을 보장받을 수 없다는 점이다.
복습을 위해 => COMA 방식에서는 Q value target 설정 시 다른 agent들의 action 집합을 고정시킨 채로 학습을 진행한다.!! -
VDN - Value Decomposition Networks
위와는 정반대로 joint action value function 을 구하는 것을 목표로 하는 framework를 갖고 있다.
각 agent의 Q 값의 합으로 전체 action-value function을 포함한다.
하지만 주의할 점은 가 i 번째 agent의 expected return을 보장하지는 않으므로 action-value function보다는 utility function으로 이해하는 것이 맞다고 한다.
QMIX
논문에서 제시한 이 방식은 앞서 소개한 IQL 와 VDN의 중간 (Q function 기준으로 완벽한 분해 <-> 완벽한 결합) 방식을 추구한다.
VDN에서는 아래와 같은 식을 만족하면 consistency가 만족된다는 주장을 펼친다.
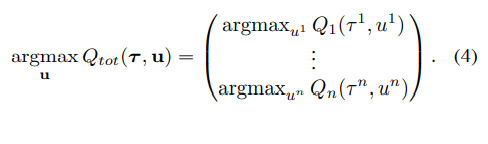
수식에 대한 설명은 전체 jointed Q-function 의 action에 대한 argmax 결과 벡터가 각 agent에 대한 Q function의 개별적인 argmax 결과의 종합과 동일하면 된다는 의미
- 이 방식은 off-policy learning method에서 구해야 하는 에 대한 값을 각 agent Q-function으로부터 쉽게 구할 수 있다는 부수적인 효과를 갖는다.
VDN 방식은 위의 식(4)를 만족하기 충분하지만 QMIX 논문은 이러한 조건은 더 큰 범위에서 monotonic function (단조 함수) 로서 표현이 가능하며 그러한 monotonicity는 아래와 같은 와 관계가 성립할 경우 보존된다는 점을 강조하고 있다.

위 식의 직관적 이해는 각 agent의 expected return을 증가시키는 방향으로의 변화는 overall expected return을 증가시키는 방향과 동일하다는 식으로 가능하다. (앞선 VDN에서 는 여러 agent들의 Q-function 값들의 합으로 표현되었었다는 점을 기억하자)
QMIX architecture
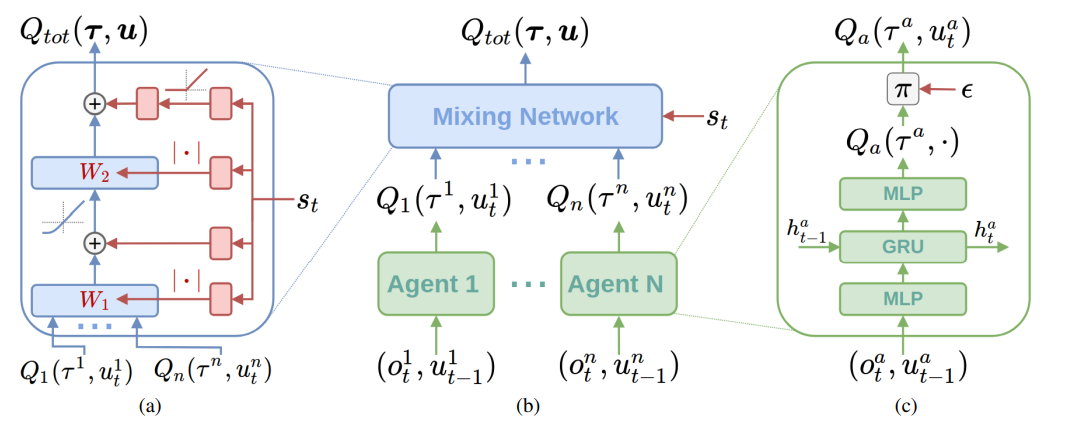
아래 그림은 QMIX의 전체적인 구조에 대해 설명하고 있다
-
먼저 각 agent들은 DRQN 형식을 띄어 과거에 취했던 action 집합에 대한 학습이 가능하다. (향 후 DRQN 방식에 대한 학습이 필요할 것으로 보임)
-
위의 절에서 식(5)를 소개하며 monotonicity를 유지해야 한다고 강조했는데 이러한 수식은 mixing network의 weight들을 양수로 제한하는 방식으로 구현될 것이다. (Q 값들에 양수 weight + non-linearity로 최종적인 Q total 값이 결정된다.)
논문에서는 bias에 대해서는 이러한 restriction을 걸지 않는다고 설명하고 있다. -
위의 non-negative 한 weight들은 각각 분리된 hypernetwork를 통해 구해진다. 이는 각각 single layer와 absolute activation function의 합으로 구성되어 있으며 (음수 결과를 내지 않기 위해) 위의 그림 (a)를 통해 확인가능하다.
-
여기서 state를 바로 mixing network에 대입하지 않고 weight의 형태로 (이를 generate하는 재료로) 사용하는 이유는 에 non-monotonic 한 방식으로 extra state information을 주기 위함이다. (이로써 더욱 다양한 state representation에 대해 학습 가능)
-
최종적인 손실함수는 DQN과 비슷하게 아래와 같은 식을 사용하며 batch 훈련이 진행되는 동안에는 freeze되어 있는 target network의 parameter를 사용한다는 점도 비슷하다.

Representational complexity에 대한 절은 정확히 이해하지 못해 넘어가도록 한다.
Reading List는 여전히 이분의 블로그를 참고하고 있다.
