논문: Demonstration of 100 Gbps coherent free-space optical communications at LEO tracking rates
1. Abstract
FSO 통신은 기존 무선 주파수가 실질적인 한계에 도달함에 따라 우주선이 겪는 data-flow 병목 현상을 완화할 준비가 되어 있다. Optical Signal은 데이터 전송률을 수십 배 향상시킬 수 있지만, 훨씬 더 정확한 지향이 요구되어 대기 turbulence 영향을 많이 받는다.
사용 가능한 자유도를 최대한 활용하여 data capacity를 극대화하는 Coherent detection 방법에는 수신된 신호를 single-mode fiber에 결합해야 하는 복잡성이 추가된다.
이 논문에서는 상용품의 optical terminal과 drone-mount된 되반사체(retroreflector) 사이의 turbulent가 있는 대기를 가로지르는 coherent link를 제시한다.
의 tip/tilt AO(적응광학) 안정화와 함께 구동되는 의 machine vision optical tracking을 통해 지향 오차와 대기 turbulence를 보정한다. 강건한 single mode fiber coupling을 유지함으로써, 지구 궤도에 있는 우주선과 동일한 최대 의 각속도로 추적하는 동안 중단 없는 100Gbps FSO link를 제공한다. 일관된 통신의 더 큰 data capacity와 기존 광섬유 기반 기술과의 호환성이 static link에서 입증됨에 따라, 궁극적으로 ground station을 통해 ground - low earth orbit 링크에서 Tbps(테라비트)도 달성할 수 있다.
2. Introduction
optical 주파수 통신은 광섬유 네트워크의 도래함에 따라 지상 통신을 혁신을 일으켰다. 그러나 free-space에서는 아직은 아니다. 여전히 RF 통신이 많은 기여를 하고 있다.
carrier frequeny(반송파)에서 가 증가할수록 RF에서(kHz-GHz) OF(Thz)로 증가하면 data capacity도 그에 비례하여 증가하므로 optical domain으로 이동하면 새로운 challenge가 생긴다.
- 엄격한 PAT
- ms단위로 optical beam 전파에 큰 영향을 주는 대기 turbulence
ground-to-ground, ground-to-air, ground-to-space link를 위한 FSO 통신의 잠재력을 달성하기 위해 대기 turbulence 효과를 반드시 줄여야 한다.
대부분 FSO 통신의 쉬운 구현에서는 빛의 세기로 On-off keying나 Pulse Position Modulation 방식으로 data를 변조한다. 이러한 detect-dection 방식은 detector가 얼마나 수신광의 intesity를 측정하는지에 변조 성능이 달린다.
Coherent detection method는 반면 수신 신호를 local oscillator(LO)와 혼합하여 phase와 polarisation 정보를 유지하므로 data를 인코딩하고 channel capacity 및 유비쿼터스 fiber 기반 기술과의 호환성을 최대한 활용할 수 있는 자유도를 추가적으로 제공한다.
이러한 Coherent 방식은 광섬유 직경이 인 single mode fiber(SMF)로 수신된 빛을 coupling 해야하며, 더 큰 multi-mode fiber(>)나 기존 직접 변조를 사용한 detector와 비교하면 pointing error와 turbulence에 더 민감하다.
현재, 지구 관측 위성은 대용량의 data를 생성하기 때문에 사용 가능한 RF 대역폭을 사용하여 지상으로 전송하기 전에 on-board에서 압축이 필요한 경우가 많고, 전력이 집중되고, data의 fidelity(압축 입력 출력 데이터의 유사성)가 줄어든다.
LEO의 예시로, 임의의 ground station이 spacecraft를 포착하는데 하루에 오직 몇 분이다. data 전송에 제약을 가진다. LEO spacecraft는 relay spacecraft(보통 지구 정지 궤도 위성)를 통해 data를 전송할 수 있고, 하지만 전송거리가 1000km 대비 로 늘어나서, SWaP 시스템에 부담이 된다. 이러한 병목 현상을 해소하기 위해 NASA의 테라바이트 적외선 전달 시스템은 cubset에 적합한 의 coherent LEO-to-ground downlink가 가능한 optical terminal를 개발하는 것이 목표다.
현재 5.6Gbps 기록의 LEO-to-ground optical data link는 coherent binay phase shift keying(BPSK)를 사용하여 2개의 ESA TESAT laser 통신 단말기 사이에서 구현되었다. 하나는 NFIRE spacecraft의 board에 있고 하나는 Spain의 Tenerife의 ground에 있다.
이 Terminal은 인공위성간 link를 위해 만들어졌기에, 대기 turbulence가 문제가 되지 않아 능동적인 turbulence 완화 기술이 필요없고; 오직 scintillation 효과를 줄이기 위해 ground 단말기 aperture만 감소시키는 경우이다.
빔 크기는 지상 단말에서 beam wander로 인한 deep fade 발생을 무시할 수 있지만, ground-to-space link의 turbulence가 지상에 집중되어 있다는 점을 고려하면 beam wander 현상은 uplink가 downlink보다 훨씬 크다.
이것은 link quality의 차이에 반영되어 각 hardware가 똑같아도 downlink는 Error-free인 반면 uplink는 BER이 이다. data rate를 이상으로 끌어올리려면 최소한 downlink fiber coupling 효율을 개선하고 uplink의 beam wander를 사전 보상하기 위한 tip/tilt AO stabilization이 필요하다.
이러한 ground station은 현재 개발중이며 GEO로부터 AO-보정 SMF coupling을 시연했지만, 우리가 아는 한 tip/tilt AO stabilised coupling은 더 어려운 LEO의 추적 속도에서 시연된 적이 없다.
ground-to-airbone 플랫폼 사이의 Tip/tilt AO 안정화 high-speed coherent optical link는 이전에 구현되었다.
ground-to-light aircraft의 link 거리에서 양방향 quadrature amplitude modulation(QAM) link를 시연했다.ground-to-drone mounted retroreflector의 왕복 의 시뮬레이션된 turbulence와 함께 2개 orbital angular momentum(OAM) multiplexed된 40Gbps quadrature phase shift keying(QPSK) link로 를 시연했다.
Angular Tracking Rate가 각각 와 로 도달했지만, LEO와 유사한 추적 속도로 fiber coupling을 유지하는 것은 이 실험의 목표가 아니다.
ultra-high capacity의 coherent free-space optical 통신은 많은 group들이 static links로 구현했다.
- 16 channel QPSK로 건물 사이 에서 달성
- 3 chanel QPSK로 1km에서 달성
- 가장 큰 capacity link은 54 channel QPSK로 tip/tilt 안정화 기능과 turbulent 에서 달성
- 단일 channel에서 probablistic constellation shaping(APSK와 QAM을 개선한) 64-ary QAM로 42M에서 800Gbps
ground-to-space link에서 high-capacity 기술을 할려면 SMF coupling을 우지할 수 있는 tracking system이 요구된다. (큰 각속도와 대기 turbulence에서도)
이 논문에서는, 상용품의 optical terminal과 airborne drone 사이에 1550nm로 coherent free-space optical link의 결과를 소개한다.
tip/tilt AO system을 concurrent closed loop machine vision(MV) tracking과 결합하여, SMF coupled link를 LEO가 겉으로 보여주는 각속도인 까지 유지한다.
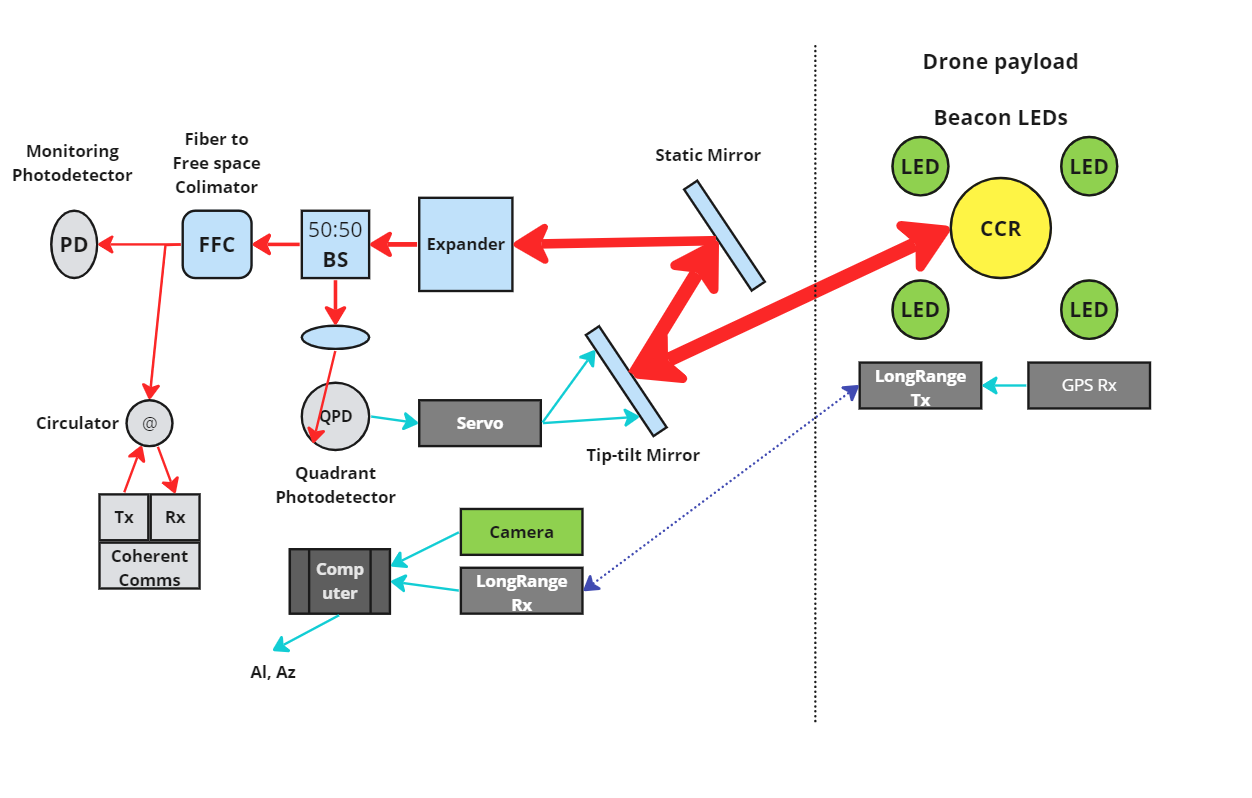
자체 tip/tilt beacon 역할을 하는 되반사된 신호를 사용하는데, 대기의 reciprocity로 인해 우리 단말기는 target(드론) 지향을 유지하기 위한 "uplink"의 사전 보상뿐만 아니라 fiber coupling을 유지하기 위한 "downlink" beam의 보정 동시에 시연.
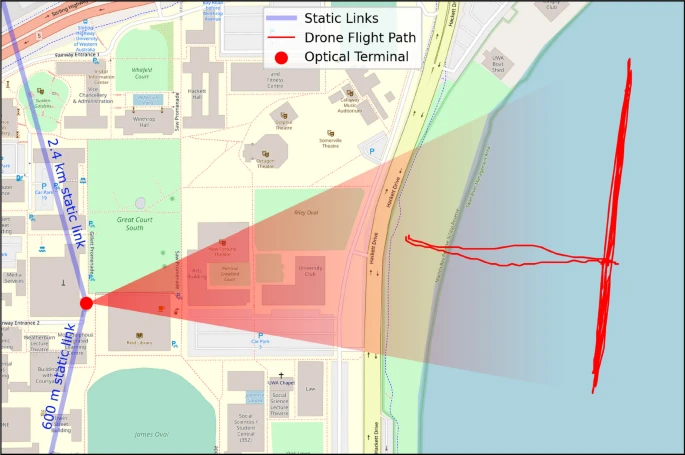
- Western Australian Optical Ground Station(WAOGS-1)
- Ground station 높이 해수면으로부터
- 드론 높이
- Ground-to-Retroreflector 사이 거리
3. Methods
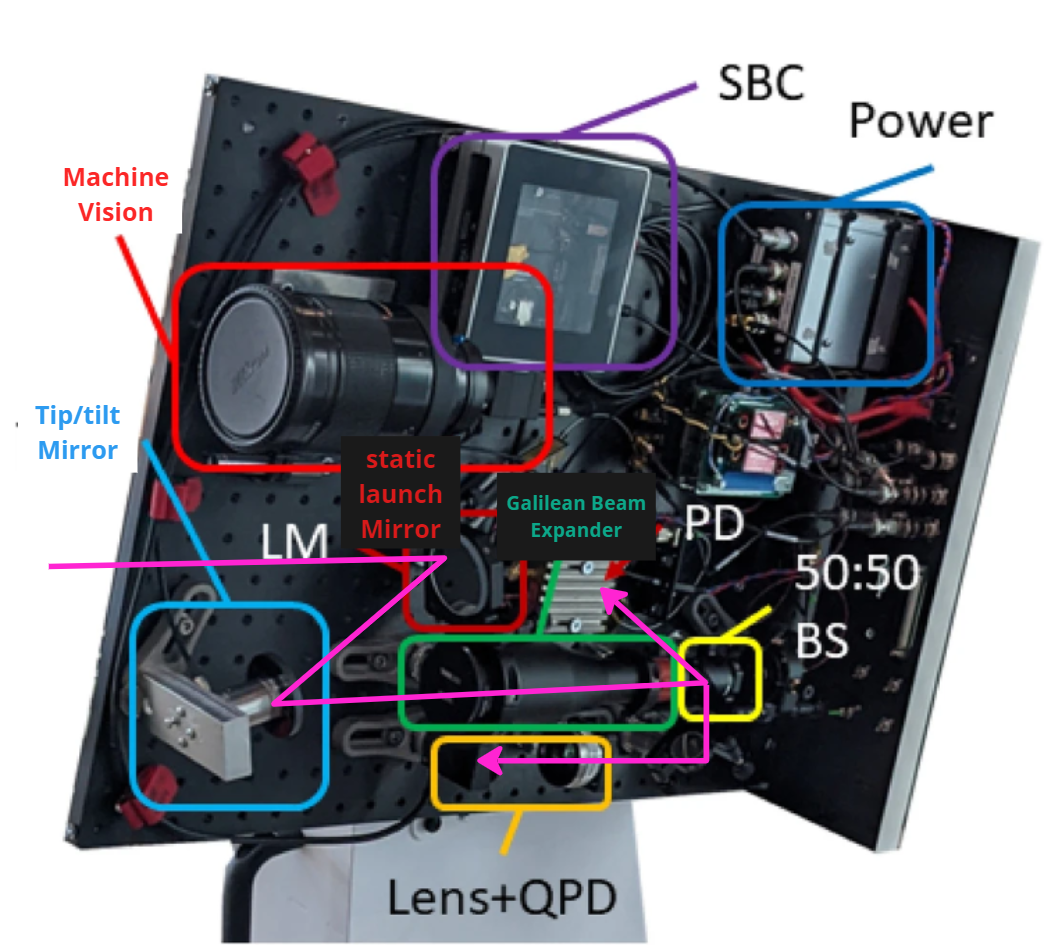
optical breadboard는 다음을 포함. 이는 mount에 고정됨.
- housing the optics
- Machin Vision system
- GPS receiver
- SBC(Single Board Computer)
위성 통과를 simulation하기 위해, CCR(Corner Cuber Reflector)가 포함된 광학 payload를 장착한 드론을 사용하여 Swan River 상공 고도에서 가시거리 에서 접혀진 링크 거리인 최대 m 떨어진 곳에서 비행함.
Corner Cuber Reflector들은 2가지 고정 위치에서 600m와 2.4km folded elngth에서 calibration과 문제해결을 수행했다.
3.1 mount design

우리의 optical 수신부 terminal 상용품은 PlaneWave L-350 precision altitude-azimuth 천문 mount를 사용했다.
- smooth, accurate tracking을 제공
- 빠른 획득을 위해 1초에 각속도로 휙돌 수 있다.
- mount는 원격으로 SBC에서 조절된다.
- internet을 통해 검색된 TLE(Two line element) 정보 또는 항공기 자동 종속 감시 방송(ADS-B) 또는 이 실험에서는 드론으로부터 Long Range signal을 통해 드론에서 전송된 GPS 좌표를 통해 초기 Mount 지향이 결정될 수 있다.
- 제조사가 제공한 mount API는 기본적으로 TLE 정보를 받고 mount path를 계산한다. ADS-B와 GPS 좌표는 맞춤형 SW 계층에서 mount의 altitude와 azimuth 좌표로 변환된다.
3.2 Machine Vision
GPS와 TLE는 optical ground station을 정확히 지향할 수 있을 만큼 정밀하지 않다.
TLE/GPS와 tip/tilt AO system사이에 Acquistion과 Tracking의 중간 단계를 제공하기 위해 MV system이 optical closed loop control로 작동한다.
- 초점거리 lens
- FOV
- 1pixel에 의 정밀 해상도를 가진다.
- 푸른 하늘 배경에서 드론의 beacon LED의 SNR을 향상시키기 위해 광대역 녹색 필터가 추가
- mount의 응답 시간은 Machine Vision 시스템으로부터 command를 수신할 수 있는 속도인 로 제한됨.
- 간헐적인 CPU 병목현상을 비파기 위해 camera 획득과 command rate를 10Hz로 제한.
- 각 camera image는 CCR를 둘러싸고 있는 target의 4개 beacon LED를 감지하기 위해 threshold를 설정
- 지향 오차는 threshold가 설정한 pixel의 질량 중심과 "Hot-spot"(역반사된 laser가 SMF에 다시 coupling되기 위해 target이 위치해야하는 pixel 좌표) 사이의 pixel 차이로 계산.
- pixel 값의 차이는 Al과 Az의 error로 변환된 다음 SW PID 제어 루프에 공급되어 offset rate를 계산하고 ("/s=/s) 단위로 hotspot 위 target을 지향하기 위해 mount에 적용.
- hotspot은 및 static link를 사용하여 비행전에 결정.
- 카메라는 x축이 azimuth에, y축이 고도에 맞춰 정렬되도록 mount위에서 정렬된다.
3.3 Coherent communications
laser 통신 신호는 commercially-off-the-shelf C form-factor(CFP) 27.95 Gbaud dual polarization quadrature phase shift keying(dp-qpsk) digital coherent optics(DCO) MODULE
DCO(Digital Coherent Optics) 전력 측정은 에서 이루어지기 때문에 대기 turbulence로 인한 빠른 power 출렁임은 aliasing을 따른다.
따라서 90:10 BS는 수신된 빛의 10%를 monitoring PD로 전송하여 로 수신된 power 정보를 capture한다. 이 샘플 속도는 대기 coherence time보다 빠르기 때문에 turbulence 또는 지향 오차로 인한 짧은 지속 시간의 deep fade가 존재하는지 확인할 수 있으며, 드론이 통과하는 동안 신호가 관찰되면 강건한 SMF coupling의 목표가 성공적으로 달성된 것으로 볼 수 있습니다.
3.4 Optics
3.5 Drone
LEO 위성의 각운동을 묘사하기 위해, professional grade drone에 gimbal-mounted optical payload에 다음이 탑재됨.
- 크기의 CCR
- machine vision 추적용 4개의 beacon LED
- payload orientation을 위한 camera
- LoRa 통해 광학 터미널과의 상대 좌표 전달할 수 있는 GPS와 기압 고도계
드론의 최대 수평 속도는 이므로 의 추적 각속도로 거리에서 묘사할 수 있다.
3.6 Flight Operations
- 이륙 후 드론은 규제가 제한된 120m 고도까지 상승하여 강 위의 위치로 이동한 다음 Beacon LED가 mount를 향하도록 gimbal pointing을 조정.
- 드론에 내장된 GPS 모듈은 드론 위치를 광학 단말 컴퓨터에 지속적으로 전송하고
- 단말은 이를 고도와 방위각으로 변환하여 드론을 지향.
- 카메라의 FOV 내에 LED가 보이면 MV loop가 닫히고 hotspot에서 드론 beacon을 획득하고 유지하도록 mount의 지향이 조정.
- drone이 machine vision hotspot에 위치하면 laser가 CCR에 입사되고 신호가 터미널로 되반사.
- 그러나 드론과의 상대적으로 짧은 거리와 바람의 turbulence에 대한 민감성 때문에 return power은 tip/tilt loop가 closed와 signal이 안정적일 때까지 간헐적으로만 관찰.
- Machine Vision과 tip/tilt loop를 동시에 실행하여 대기 turbulence로 인한 beam wander뿐만 아니라 이게 의도적인지, wind의 난기류이든 거시적인 모션을 보정하여 drone 추적을 한다.
- Machine Vision은 높은 amplitude와 낮은 주파수() error를 mount로 조절
- tip/tilt loop는 낮은 amplitude()와 높은 주파수 error를 tip/tilt mirror로 조절
두 추적 loop를 모두 closed 상태에서 LEO 위성에 대한 FSO link에 필요한 추적 속도를 복제하여 드론을 해당 경로로 비행했습니다.