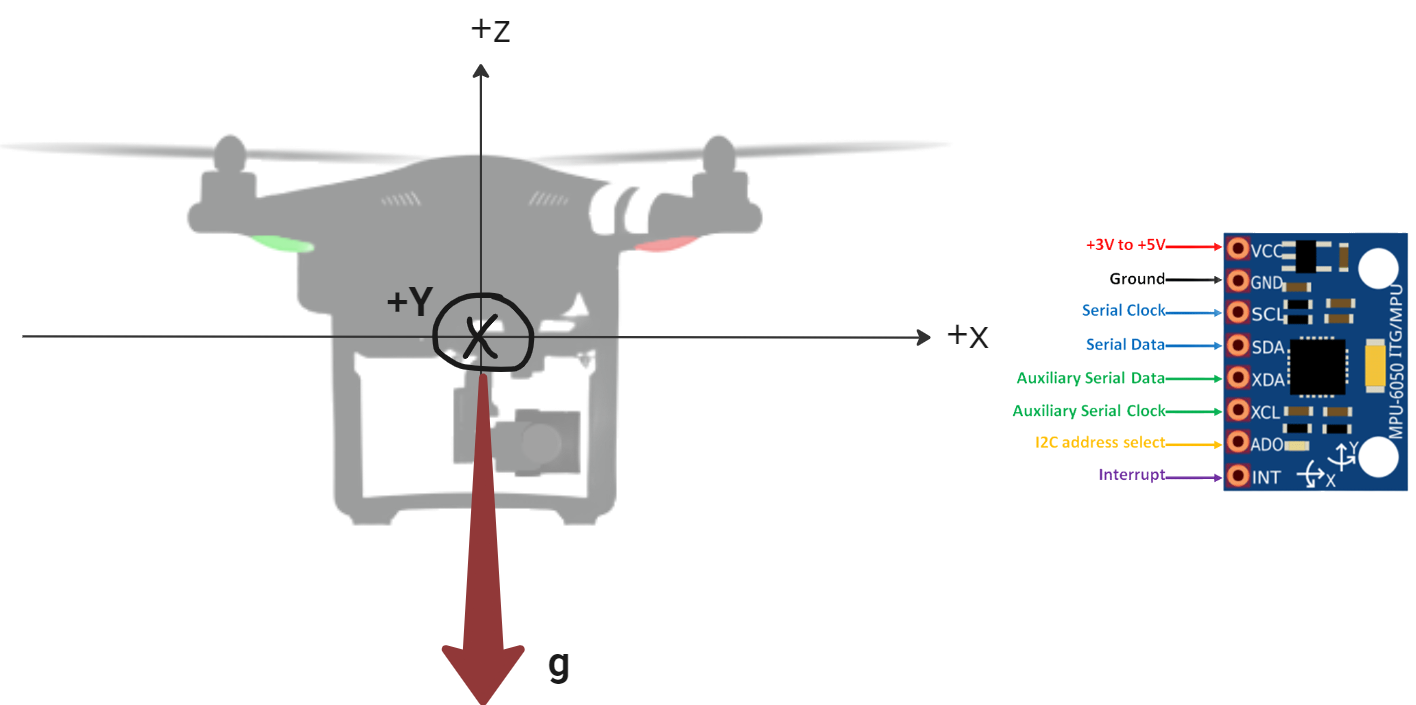
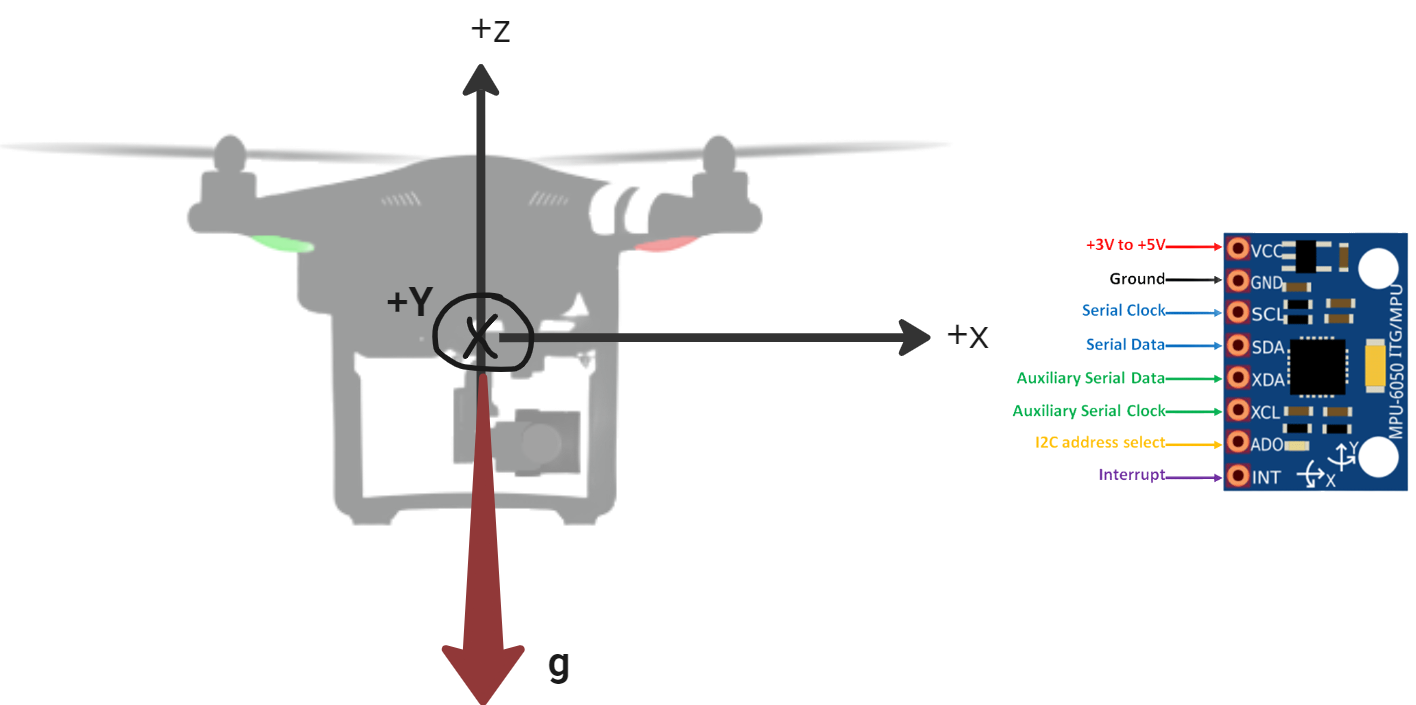
드론 및 MPU6050의 전진방향은 +X축 방향이다.
드론의 좌측 옆면은 +Y축 방향이다. 즉 그림으로 들어가는 방향이 +Y방향.
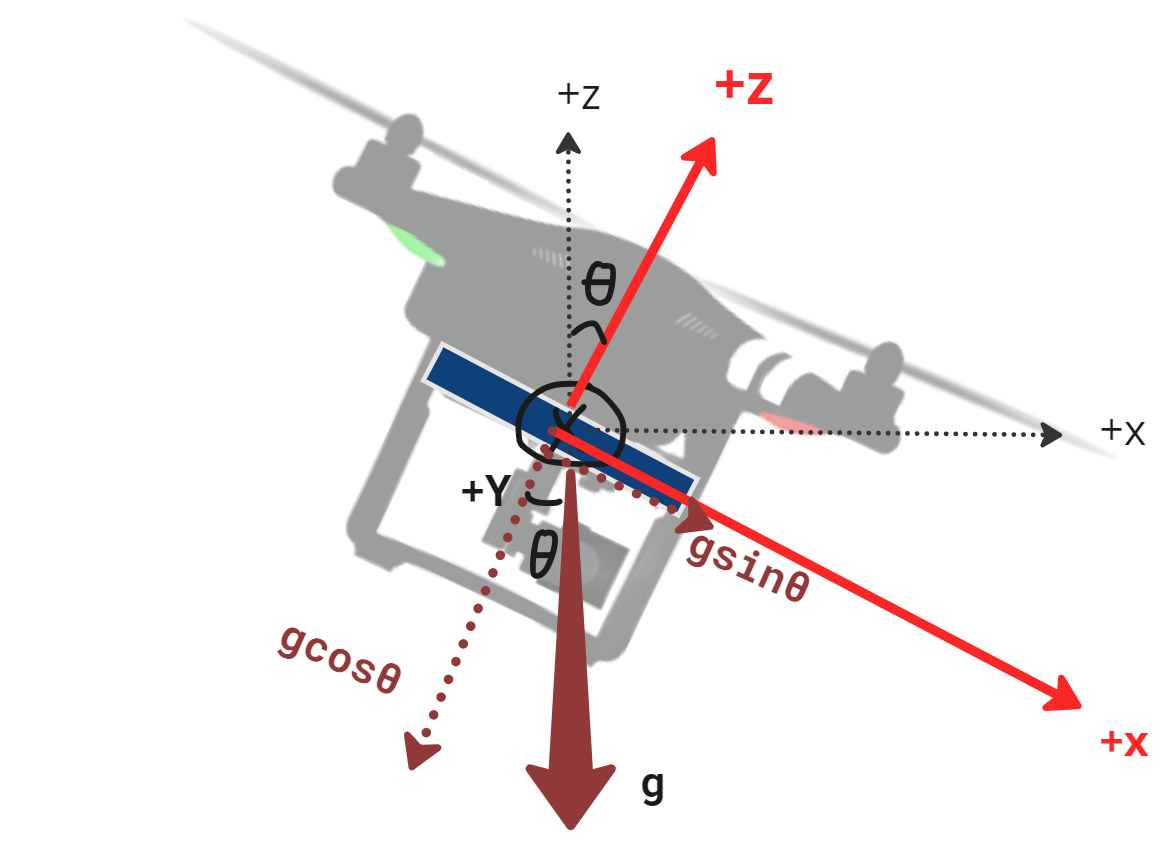
드론의 Pitch가 θpitch>0 만큼 회전하여 평행을 이룬 경우를 가정하자.
MPU6050 좌표계에서 빨간색 +z방향으로 받게 되는 가속도는 gcosθpitch이다.
빨간색 +x방향으로 받게 되는 가속도는 gsinθpitch인데 x방향과 같은 방향이므로, −gsinθpitch이다.
AcX=−gsinθpitch AcY=0 AcZ=gcosθpitch
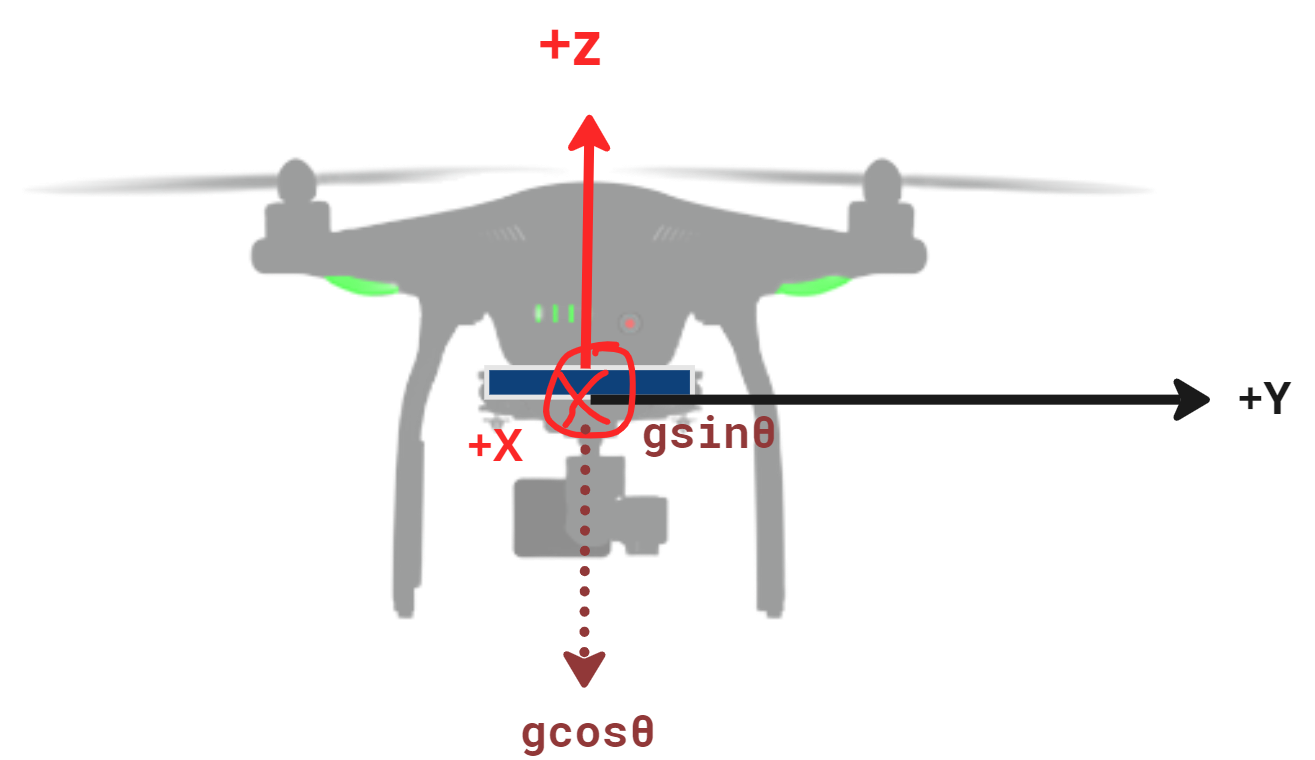
아래 그림은 위의 pitch가 θpitch>0 만큼 기울어진 평행된 드론을 후면에서 본 모습이다. 그림으로 들어가는 방향이 드론의 전진방향. MPU6050의 좌표계에서 Z방향이 받는 가속도는 gcosθpitch이다.
MPU6050의 좌표계의 X방향이 그림에서 들어가는 방향이고 받는 가속도는 −gsinθpitch이다.
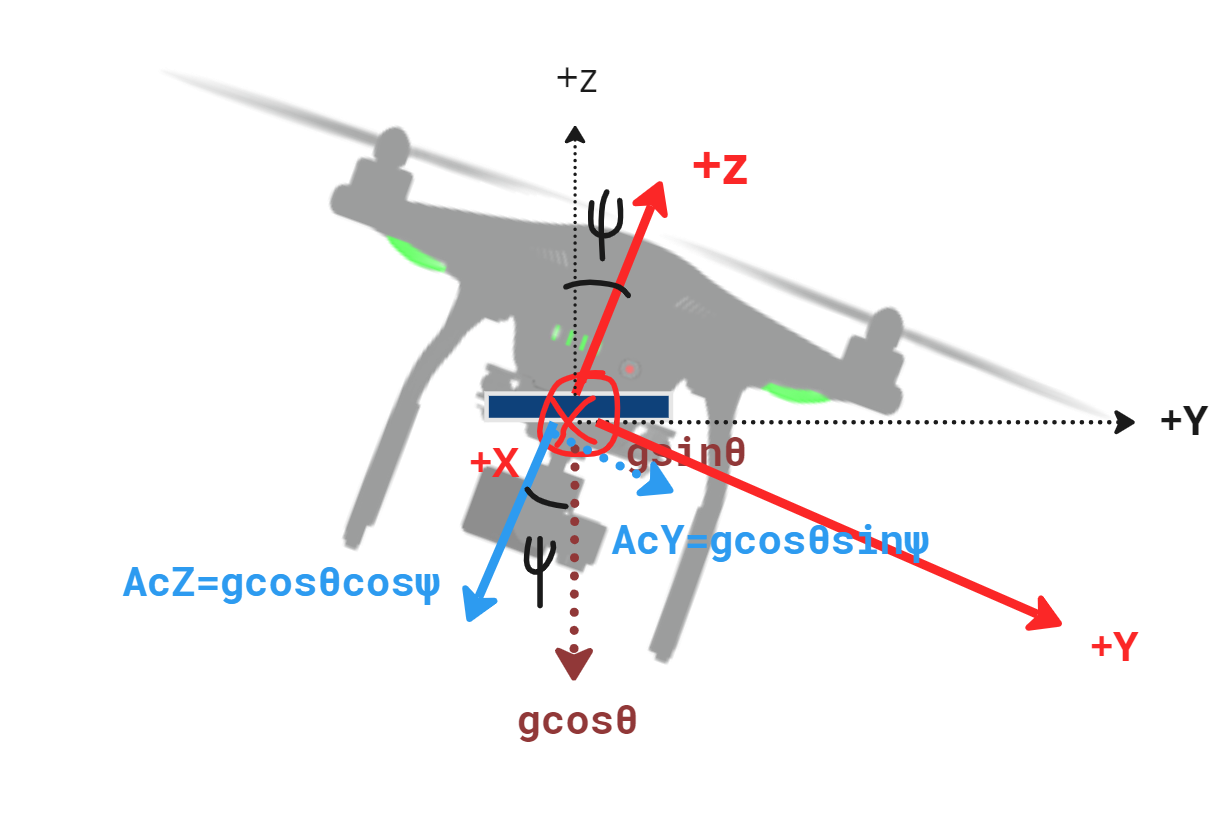
이 드론의 roll 방향을 ψroll>0 만큼 기울이면, 아래와 같이 MPU6050이 받는 가속도는 달라진다.
MPU6050의 좌표계의 Z방향이 받는 가속도는 gcosθpitchcosψroll
Y방향이 받는 가속도는 −gcosθpitchsinψroll