드론제어
1.PID 제어기 원리
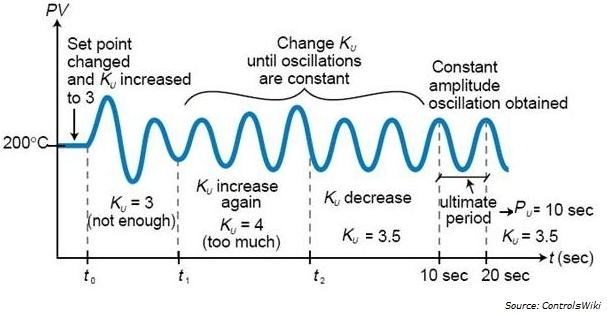
PID 제어기는 feedback 제어기의 형태를 가지고 있음. 제어 대상에 의해 정해지는 입력(Input)을 측정하여 이를 목표로 하는 설정 값(setpoint)와 비교하여 오차(error)를 계산. $Error = Setpoint - Input$ 이 오차 값을 이용
2024년 1월 3일
2.모터 속도 분배 알고리즘
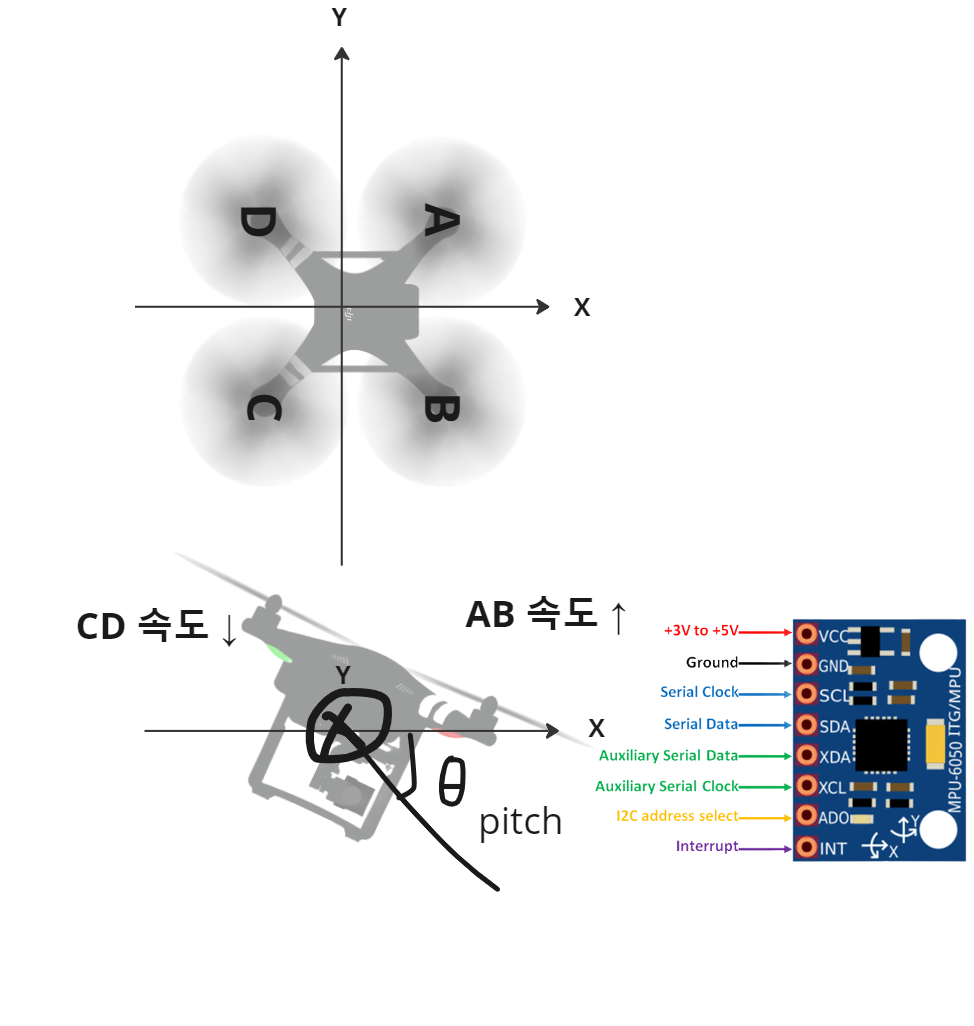
1. Roll의 균형 값과 모터 속도 드론의 후면을 본 그림이다. x축이 드론이 전진하는 방향이고
2024년 1월 4일
3.가속도 센서로 기울어진 각도 구하는 공식 유도
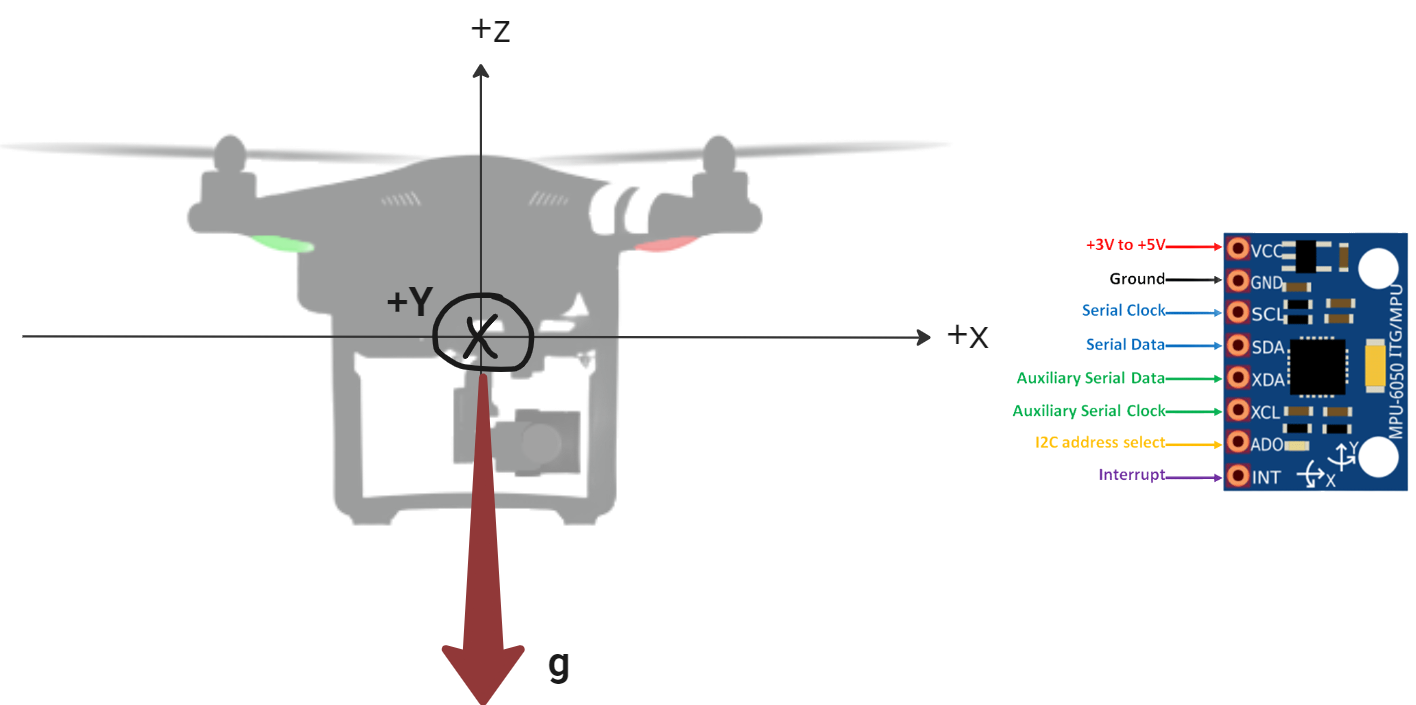
드론 및 MPU6050의 전진방향은 +X축 방향이다.드론의 좌측 옆면은 +Y축 방향이다. 즉 그림으로 들어가는 방향이 +Y방향.드론의 Pitch가 $\\theta\_{pitch}$>0 만큼 회전하여 평행을 이룬 경우를 가정하자.MPU6050 좌표계에서 빨간색 +z방향으
2024년 1월 4일