교착상태(Deadlock)은 서로 자원을 요구하기만 하고 처리하지를 못하는 상태이다. 이에 대한 해결방법으로 예방, 회피, 감지 및 복구, 무시가 있다.
교착상태
: 자원을 소유한 쓰레드(프로세스)들 사이에서, 각 쓰레드는 다른 쓰레드가 소유한 자원을 요청하여 무한정 대기하고 있는 현상
-> 다중 프로그래밍 시스템 초기에 노출된 문제점이다.
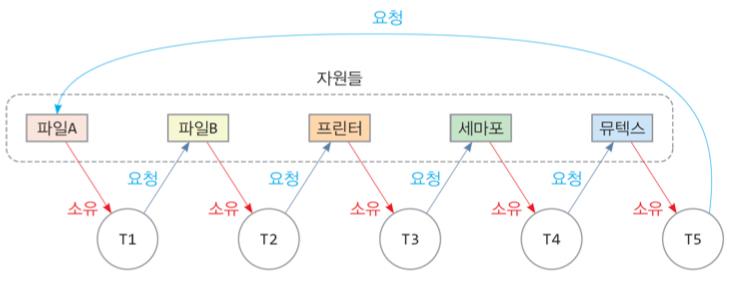
다음 그림처럼 각 쓰레드가 다른 쓰레드가 소유하고 있는 자원을 요청하면서 환형 요청/대기(circular wait)을 이루게 되었다. 환형 고리는 스스로 인식이나 해제가 불가하다.
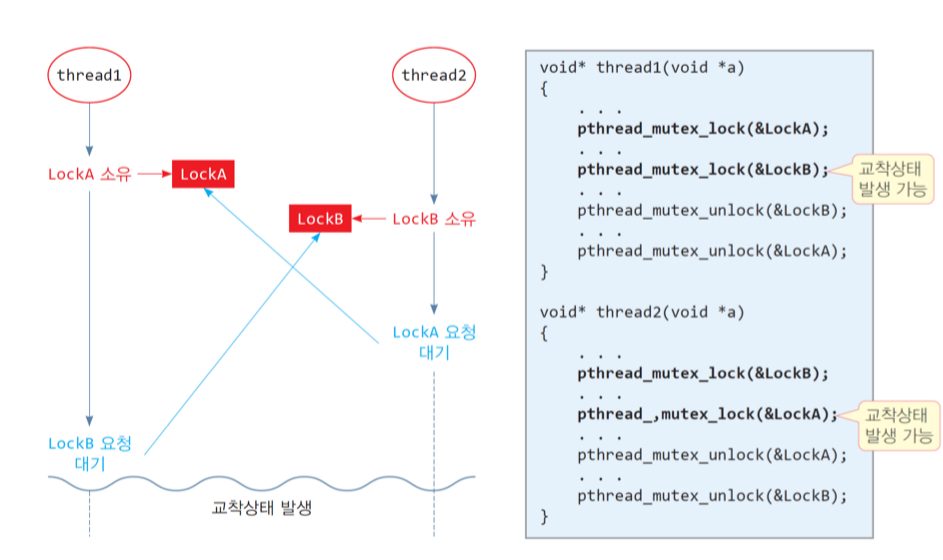
다음은 교착상태를 확인해볼 수 있는 코드이다. 두 쓰레드가 각각 락을 획득한 이후에 상대의 락을 기다리는 상황이다. 서로가 서로의 락을 기다리며 무한 대기하게 된다.
#include <stdio.h>
#include <stdlib.h>
#include <pthread.h>
#include <unistd.h>
int x = 0; // shared
int y = 0; // shared
pthread_mutex_t lock1; // mutex lock
pthread_mutex_t lock2; // mutex lock
void* thread1(void* arg) {
pthread_mutex_lock(&lock1); // lock1 for x
printf("lock thread1 lock1 \n");
x++;
sleep(2);
pthread_mutex_lock(&lock2);
printf("unlock thread1 lock2\n");
y++;
pthread_mutex_unlock(&lock2); // unlock lock2
printf("unlock thread1 lock2 \n");
pthread_mutex_unlock(&lock1); // unlock lock1
printf("unlock thread1 lock1\n");
}
void* thread2(void* arg) {
pthread_mutex_lock(&lock2); // lock2 for y
printf("lock thread2 lock2\n");
y++;
sleep(2);
pthread_mutex_lock(&lock1); // lock1 for x
printf("lock thread2 lock1\n");
x++;
pthread_mutex_unlock(&lock1); // unlock lock1
printf("unlock thread2 lock1 \n");
pthread_mutex_unlock(&lock2); // unlock lock2
printf("unlock thread2 lock2 \n");
}
int main() {
pthread_t tid[2];
pthread_mutex_init(&lock1, NULL);
pthread_mutex_init(&lock2, NULL);
pthread_create(&tid[0], NULL, thread1, NULL);
pthread_create(&tid[1], NULL, thread2, NULL);
pthread_join(tid[0], NULL);
pthread_join(tid[1], NULL);
pthread_mutex_destroy(&lock2);
pthread_mutex_destroy(&lock1);
printf("x = %d, y = %d \n", x, y);
return 0;
} |
 |
기아 vs 교착
- Starvation - 운영체제가 잘못된 정책을 사용하여 특정 프로세스의 작업이 지연되는 문제
- Deadlock - 여러 프로세스가 작업을 진행하다 보니 자연적으로 일어나는 문제
교착상태의 잠재적 요인들
- 자원
- 교착상태의 발생지
- 교착상태는 멀티쓰레드가 자원을 동시에 사용하려는 충돌이 요인
- 컴퓨터 시스템에는 많은 자원 존재
- 소프트웨어 자원: 뮤텍스, 스핀락, 세마포어, 파일, 데이터베이스
- 하드웨어 자원: 프린터, 메모리, 프로세서 등
- 자원과 쓰레드
- 한 쓰레드가 여러 자원을 동시에 필요로 하는 상황이 요인
- 자원과 운영체제
- 한 번에 하나씩 자원을 할당하는 운영체제 정책이 요인
- 만일 쓰레드가 필요한 자원을 한 번에 모두 요청하도록 한다면? -> 교착상태가 발생하지 않게 할 수 있다.
- 자원 비선점
- 할당된 자원은 쓰레드가 자발적으로 내놓기 전에 강제로 뺐지 못하는 정책이 요인
- 운영체제는 쓰레드가 가진 자원을 강제로 뺐지 못함
- 만일 강제로 뺐을 수 있다면? -> 교착상태가 발생하지 않게 할 수 있다.
교착상태는 공유변수와 관련하여 코딩을 잘못한다면, 커널에서도 정말 가끔 발생한다. 하지만 교착상태를 시스템에서 직접적으로 막지는 않는다. (막는데 많은 시간과 공간의 비용이 들기 때문) 교착상태가 발생하도록 두고, 교착상태가 발생한 것 같으면, 시스템 재시작 혹은 의심스러운 몇몇 프로그램을 종료시킨다.
교착상태 모델링: 자원 할당 그래프(Resource Allocation Graph, RAG)
: 자원에 대한 시스템의 상태를 나타내는 방향성 그래프
- 컴퓨터 시스템에 실행 중인 전체 쓰레드와 자원의 개수
- 각 자원의 총 인스턴스 개수와 할당 가능한 인스턴스 개수
- 각 쓰레드가 할당받아 소유하고 있는 자원의 인스턴스 개수
- 각 쓰레드가 실행에 필요한 자원 유형과 인스턴스 개수
이러한 요소를 자원할당그래프로부터 확인하고 교착상태를 판단할 수 있다.
그래프는 정점과 간선으로 이루어져 있다.
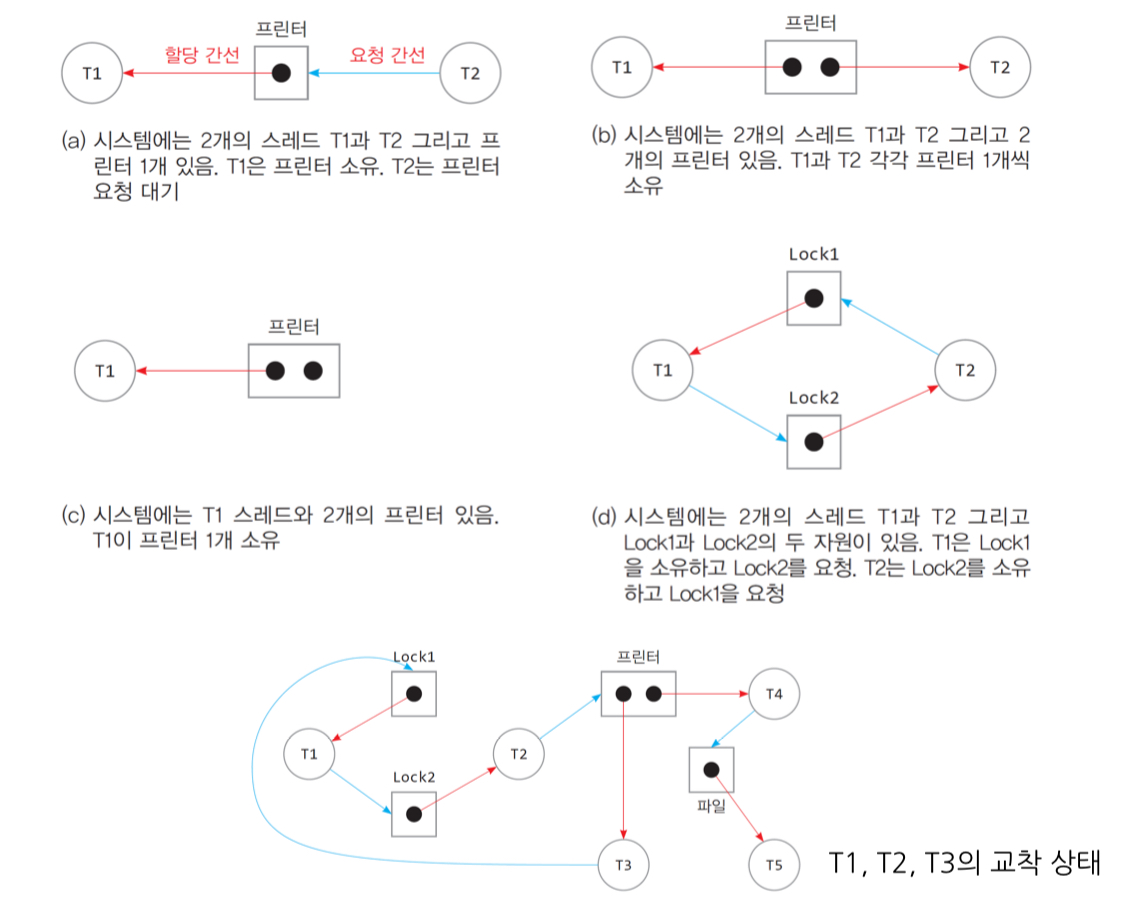
- 정점은 프로세스/쓰레드(원), 자원(사각형)을 나타낸다.
- 간선은 소유/요청 관계를 표시하는데, 할당 간선과 요청 간선이 있다.
- 할당 간선: 자원에서 쓰레드로 향하는 화살표, 할당 받은 상태 표시
- 요청 간선: 쓰레드에서 자원으로 향하는 화살표, 요청 표시
교착상태 해결
교착상태의 발생 필요충분조건
Coffman condition
다음 4가지 상황이 허용되는 시스템은 언제든 교착상태가 발생할 수 있다.
자원적 특성
- 상호 배제(Mutual Exclusion) - 각 자원은 한 번에 하나의 프로세스/쓰레드에게만 할당(자원이 한 쓰레드에게 할당되면 다른 쓰레드에게는 할당될 수 없음)
- 비선점(No Preemption) - 프로세스/쓰레드에게 할당된 자원을 강제로 빼앗지 못함
행위적 특성
- 점유와 대기(Hold & wait) - 쓰레드가 한 자원을 소유(lock)하면서 다른 자원을 기다리기
- 환형 대기(Circular wait) - 한 그룹의 쓰레드들에 대해, 각 쓰레드는 다른 쓰레드가 요청하는 자원을 소유하는 원형 고리 형성
교착상태 해결
1. 교착상태 예방(prevention)
- 교착상태 발생 여지를 차단하여 예방
- 교창상태에 빠지는 4가지 조건(상호 배제, 비선점, 점유와 대기, 환형 대기) 중 하나 이상의 조건이 성립되지 못하도록 시스템 구성
2. 교착상태 회피(avoidance)
- 미래에 교착상태로 가지 않도록 회피
- 자원 할당 시마다 미래의 교착 상태 가능성을 검사하여 교착 상태가 발생하지 않을 것이라고 확신하는 경우에만 자원 할당
- 안전한 상태와 불안전한 상태로 시스템 상태 분류, 안전한 상태인 경우에만 자원 할당
- 자원 할당 시마다 교착 상태 가능성을 검사하므로 시스템 성능 저하
3. 교착상태 감지 및 복구(detection and recovery)
- 교착상태를 감지하는 프로그램 구동, 발견 후 교착상태 해제
- 백그라운드에서 교착 상태를 감지하는 프로세스가 늘 실행되어야 하는 부담
4. 교착상태 무시
- 아무런 대비책 없음, 교착상태는 없다고 단정
- 사용자가 이상을 느끼면 재실행할 것이라고 믿는 방법
- 리눅스, 윈도우 등 현재 대부분의 운영체제에서 사용하는 가장 일반적인 방법
- 교착상태 예방, 회피, 감지 복구 등에는 많은 시간과 공간이 필요하며 시스템의 성능을 떨어뜨린다.
- 심각하지 않은 작업들에 대해서는 교착상태 무시
교착상태 예방
코프만의 4가지 조건 중 최소 하나를 성립하지 못하게 한다.
1. 상호 배재 조건 -> 상호 배제 없애기
- 동시에 2개 이상의 쓰레드가 자원을 활용할 수 있도록 한다.
- 컴퓨터 시스템에서 근본적으로 적용 불가능한 방법
2. 비선점 조건 -> 선점 허용
- 모든 자원을 빼앗을 수 있도록 만드는 방법
- 기아현상이 발생할 수도 있음
- 자원을 강제로 반환하게 된 쓰레드가 자원을 다시 사용하게 될 때 이전 상태로 되돌아갈 수 있도록 상태를 관리할 필요
- 간단하지 않고 오버헤드가 매우 크가.
=> 자원적 특성을 제한하기는 어렵다.
3. 점유와 대기 조건 -> 기다리지 않게 한다.
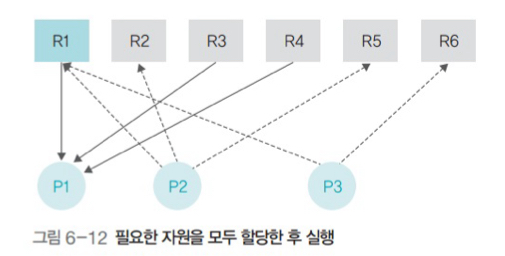
(방법1) 운영체제는 쓰레드 실행 전 필요한 모든 자원을 파악하고 실행시 한 번에 할당
- 다른 쓰레드는 필요한 자원을 할당 받지 못하고 실행 대기
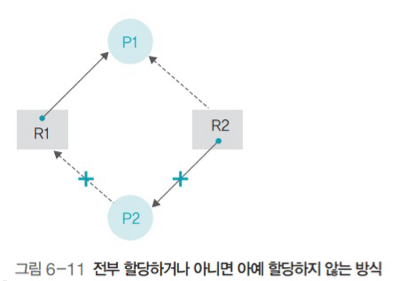
(방법2) 쓰레드가 새로운 자원을 요청하려면, 현재 할당 받은 모든 자원을 반환하고, 한꺼번에 요청하여 할당
문제점
- 프로세스가 자신이 사용하는 모든 자원을 자세히 알기 어려움
- 당장 사용하지 않는 자원을 쓰레드에게 묶어 두기 때문에 자원 활용률이 떨어짐
- 많은 자원을 사용하는 프로세스가 적은 자원을 사용하는 프로세스보다 불리함
-> 결국 Batch-processing(일괄 처리)화된다.
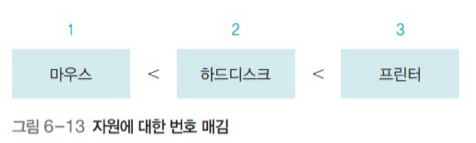
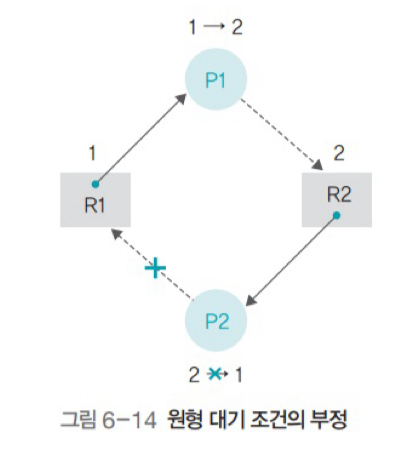
4. 환형 대기(Circular Wait) 조건 -> 환형 대기 제거
모든 자원에 숫자를 부여하고 숫자가 큰 방향으로만 자원을 할당한다.
예: 마우스를 할당받은 상태에서 프린터를 할당받을 수는 있지만 프린터를 할당받은 상태에서 마우스나 하드디스크를 할당받을 수 없다.
예: 프로세스 P2는 자원을 할당받을 수 없어 강제 종료되고 프로세스 P1은 정상적으로 실행된다.
문제점
- 프로세스 작업 진행에 유연성이 떨어짐
- 자원의 번호를 어떻게 부여할 것인지가 문제
=> 점유와 대기, 원형 대기는 프로세스 작업 방식을 제한하고 자원을 낭비하기 때문에 사용이 어렵다.
교착상태 회피
- 자원 할당 시, 미레에 환형 대기가 발생할 것으로 판단되면 자원 할당하지 않는 정책
- 프로세스에 자원을 할당할 때 어느 수준 이상의 자원을 나누어주면 교착 상태가 발생하는지 파악하여 그 수준 이하로 자원을 나누어주는 방법
- 교착 상태가 발생하지 않는 범위 내에서만 자원을 할당하고, 교착 상태가 발생하는 범위에 있ㅇ면 프로세스를 대기시킨다.
=> 할당되는 자원의 수를 조절하여 교착 상태를 피한다.
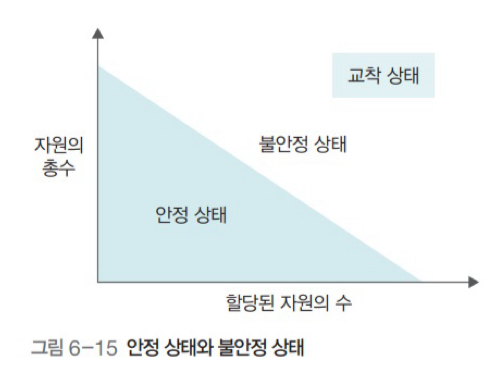
안전한 상태 Safe state - 현재 프로세스들을 어떤 순서로 실행시켰을 때, 모든 프로세스들이 자신이 요청하는 자원을 가지고 실행할 수 있다면 안전한 상태
불안전한 상태 Unsafe state - 환형 대기에 빠질 수 있는 상태
-> 할당된 자원이 적으면 안정 상태가 크고, 할당된 자원이 늘어날수록 불안정 상태가 커짐
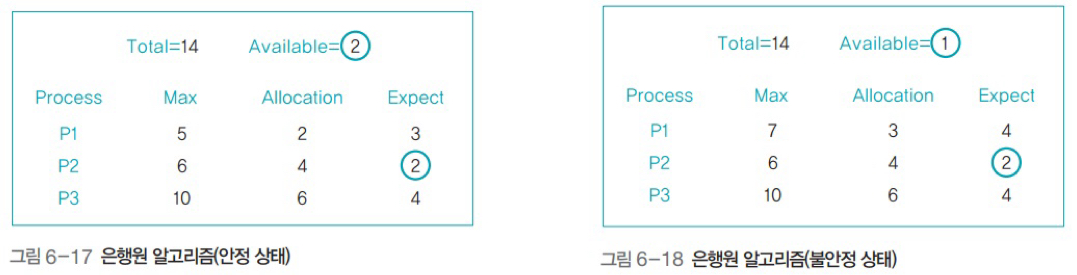
bankers's 알고리즘
자원 할당 전에 미래에 교착상태 발생여부를 판단한다.
알고리즘
- 각 프로세스가 실행 시작 전에 필요한 전체 자원의 수를 운영체제에게 알린다.
- 자원을 할당할 때마다, 자원을 할당해주었을 때 교착상태가 발생하지 않을 만큼 안전한 상태인지 판단하여 안전한 상태일 때만 자원을 할당한다.
고려 요소
- 각 프로세스가 필요한 자원의 개수
- 현재 각 프로세스가 할당 받은 자원의 개수
- 시스템 내 할당 가능한 자원의 개수
하지만 이런 알고리즘은 비현실적이다.
- 각 프로세스가 실행 전에 필요한 자원의 개수를 아는 것은 불가능하고
- 프로세스의 개수도 동적으로 변하기 때문에, 미리 프로세스의 개수를 정적으로 고정시키는 것은 불가능하다.
교착상태 감지 및 복구
교착상태를 감지하는 프로그램을 통해, 형성된 교착상태를 푼다. 백그라운드에서 교착상태를 감지하는 프로그램을 늘 실행한다.
감지 방법
-
자원 할당 그래프를 이용한 교착 상태 검출
- 단일 자원을 사용하는 경우 자원 할당 그래프에 사이클이 있으면 교착 상태
-
타임아웃을 이용한 교착 상태 검출
- 일정 시간 동안 작업이 진행되지 않은 프로세스를 교착 상태가 발생한 것으로 간주하여 처리
- 교착 상태가 자주 발생하지 않을 것이라는 가정하에 사용(타조 알고리즘)
- 타임아웃이 되면 프로세스가 종료
복구 방법
-
자원 강제 선점(preemption)
- 교착상태에 빠진 쓰레드 중 하나의 자원을 강제로 빼앗아 다른 쓰레드에게 할당
-
롤백(rollback)
- 운영체제는 주기적으로 교착상태가 발생할 것으로 예측되는 쓰레드의 상태를 저장하여 두고 교착상태가 발생하면 마지막으로 저장된 상태로 돌아가도록 하고, 다시 시작하면서 자원을 다르게 할당
- 시간과 메모리 공간에 대한 부담이 크기 때문에 잘 사용하지 않음
-
프로세스/쓰레드 강제 종료(kill process)
- 교착상테에 빠지 쓰레드 중 하나 강제 종료, 가장 간단하면서도 효과적인 방법
프로세스를 강제로 종료하는 방법
- 교착 상태를 일으킨 모든 프로세스를 동시에 종료
- 교착 상태를 일으킨 프로세스 중 하나를 골라 순서대로 종료
- 우선순위가 낮은 프로세스를 먼저 종료
- 우선순위가 같은 경우 작업 시간이 짧은 프로세스를 먼저 종료
- 위의 두 조건이 같은 경우 자원을 많이 사용하는 프로세스를 먼저 종료
교착상태 무시
교착상태는 반드시 발생하지만 자주 발생하지는 않는다. 하지만 발생횟수/확률에 비해 해결에는 상대적으로 많은 비용이 든다.
Ostrich algorithm
타조 알고리즘
- 타조가 머리를 모래 속에 박고 자신이 보이지 않는 체하는 것
- 교착상태는 발생하지 않을거야 하고 아무 대책을 취하지 않는 접근법(무시)
- Unix와 윈도우 등 현재 거의 모든 운영체제에서 사용
- 의심 가는 쓰레드를 종료시키거나 시스템 재시작(reboot)
(문제)
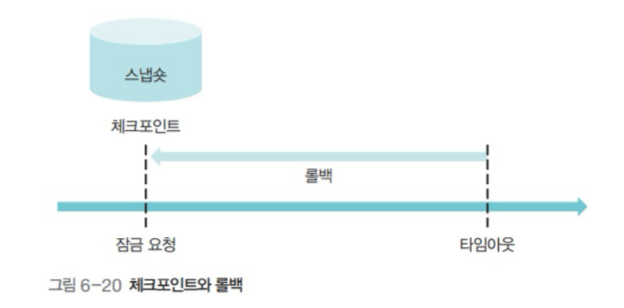
교착상태가 발생하면 시스템 재시작 혹은 특정 프로세스/쓰레드를 강제 종료하면서 관련된 데이터를 잃어버릴 수 있다. (하지만 전체적으로 크지 않은 손실)
예: 데이터베이스
- 데이터베이스에서 타임아웃으로 프로세스가 종료되면 일부 데이터의 일관성이 깨질 수 있다.
- 데이터의 일관성이 깨지는 문제를 해결하기 위해 체크포인트와 롤백 사용
- 체크포인트: 작업을 하다가 문제가 발생하면 저장된 상태로 돌아오기 위한 표시
- 롤백: 작업을 하다가 문제가 발생하여 과거의 체크포인트로 되돌아가는 것