인터페이스 기초
- 노드 간 데이터를 주고받을 때 사용되는 데이터의 형태
- IDL(interface definition language) : msg, srv, action 등
- 단순 자료형 : 정수, boolean, ...
- 메시지 안에 메시지 : geometry_msgs/msgs/Twist의
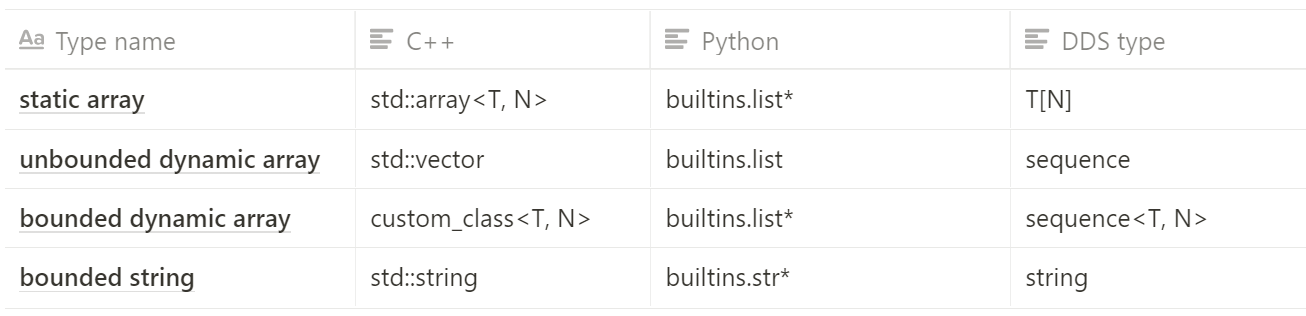
Vector3 linear - 배열 : sensor_msgs/msgs/LaserScan 의
float32[] ranges
단순 자료형
- 정의 방법
fieldtype1 fieldname1
fieldtype2 fieldname2
fieldtype3 fieldname3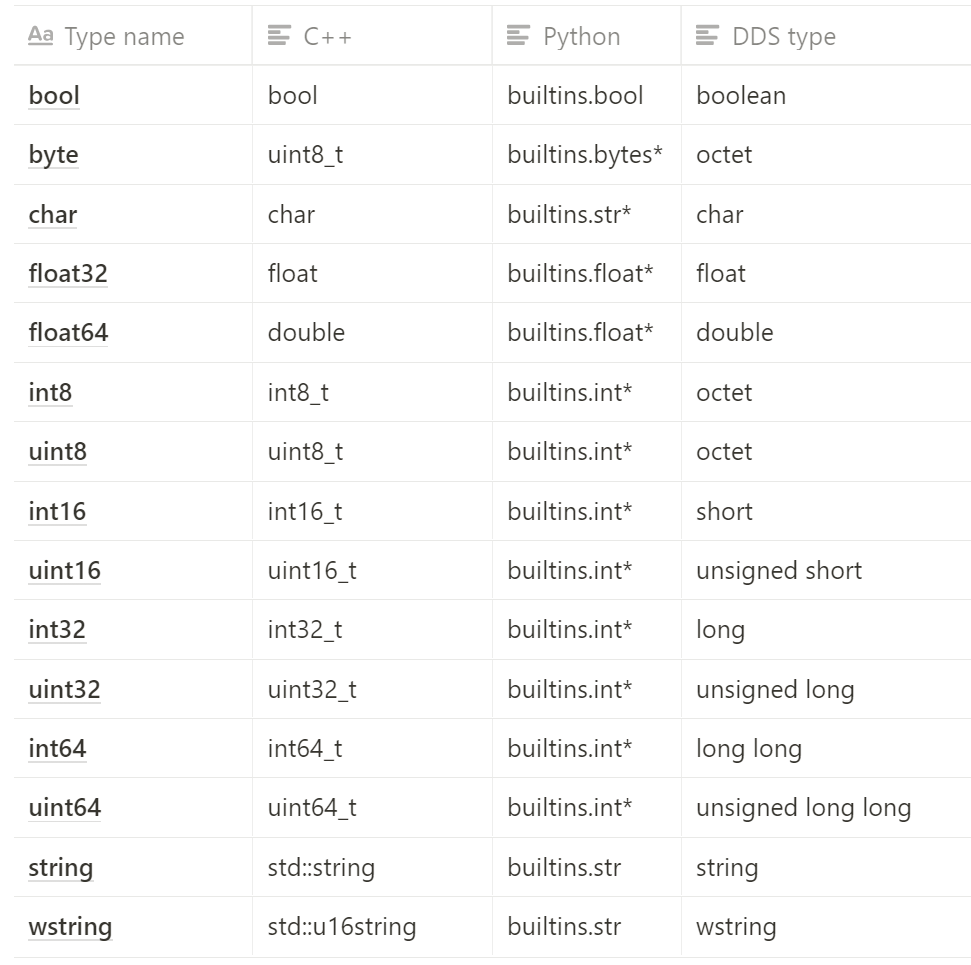
토픽 - 메시지
- turtlesim 패키지
$ ros2 interface show geometry_msgs/msg/Twist
$ ros2 interface show geometry_msgs/msg/Vector3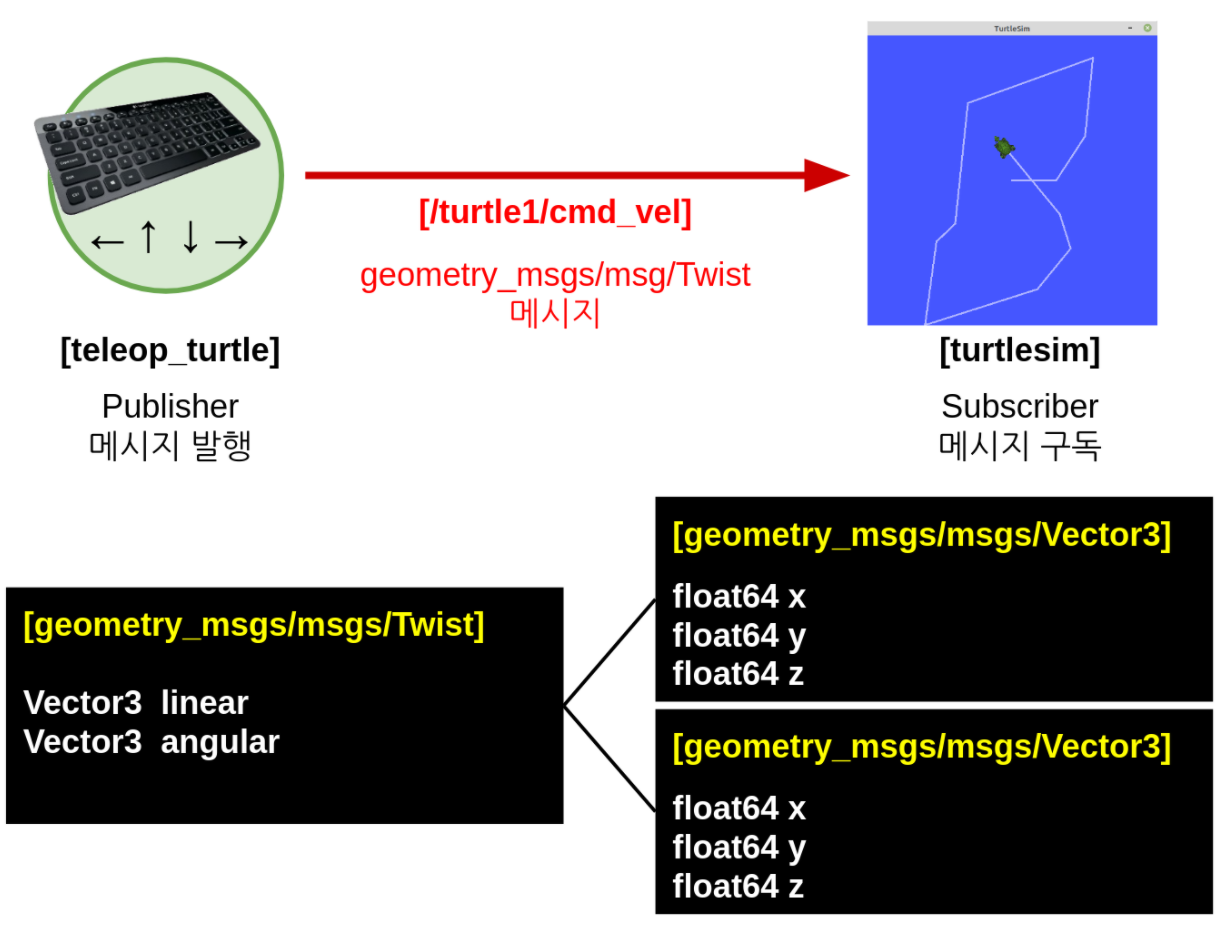
-
geometry_msgs/msgs/Twist 메시지 =
float64 자료형의 linear.x, linear.y, linear.z, angular.x, angular.y, angular.z -
ros2 interface [something]
- show
- list : 현재 개발 환경의 모든 msg, srv, action 메시지
- package : msg, srv, action 인터페이스를 담고 있는 패키지의 목록
- packages : 지정한 패키지에 포함된 인터페이스들
- proto : 인터페이스의 기본 형태
$ ros2 interface proto geometry_msgs/msg/Twist
"linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
"서비스 인터페이스
- /spawn 서비스 예시
$ ros2 interface show turtlesim/srv/Spawn.srv
float32 x
float32 y
float32 theta
string name
---
string name- ‘---’ 구분자
x, y, theta, name : 서비스 요청 (클라이언트 → 서버) ⇒ name (서버에서 서비스 수행 이후 → 클라이언트)
액션 인터페이스
- turtlesim 예시 /turtle1/rotate_absolute 액션에 사용된 RotateAbsolute.action 인터페이스
$ ros2 interface show turtlesim/action/RotateAbsolute.action
float32 theta # 목표
---
float32 delta # 결과
---
float32 remaining # 피드백 - ‘—-’ 구분자
액션 목표(goal)), 액션 결과(result), 액션 피드백(feedback)을 구분
x, y, theta, name : 서비스 요청 (클라이언트 → 서버) ⇒ name (서버에서 서비스 수행 이후 → 클라이언트)
인터페이스
- 인터페이스으로만 구성된 패키지를 별도로 만들어 사용해야 의존성면에서 관리하기 편함
인터페이스 패키지 생성
- 패키지 이름 : msg_srv_action_interface_example
$ cd ~/robot_ws/src
$ ros2 pkg create --build-type ament_cmake msg_srv_action_interface_example
$ cd msg_srv_action_interface_example
$ mkdir msg srv action -
msg 인터페이스
ArithmeticArgument.msg
- 텍스트 파일 생성하기 : touch [파일명].[확장자]
- gedit 으로 파일 수정
- 텍스트 파일 생성하기 : touch [파일명].[확장자]
# Messages
builtin_interfaces/Time stamp
float32 argument_a
float32 argument_b- msg : 메시지 파일은 ROS 메시지의 영역에 대해 기술한 단순한 텍스트 파일입니다. 이 파일은 다양한 언어의 소스코드에서 사용하는 메시지를 만드는 데 사용됩니다.
- srv 인터페이스 ArithmeticOperator.srv
- srv 인터페이스 ArithmeticOperator.srv
# Constants
int8 PLUS = 1
int8 MINUS = 2
int8 MULTIPLY = 3
int8 DIVISION = 4
# Request
int8 arithmetic_operator
---
# Response
float32 arithmetic_result-
action 인터페이스
ArithmeticChecker.action
# Constants
int8 PLUS = 1
int8 MINUS = 2
int8 MULTIPLY = 3
int8 DIVISION = 4
# Request
int8 arithmetic_operator
---
# Response
float32 arithmetic_result패키지 설정 파일
패키지 설정 파일(package.xml) 작성 / 수정
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="3">
<name>msg_srv_action_interface_example</name>
<version>0.2.0</version>
<description>
ROS 2 example for message, service and action interface
</description>
<maintainer email="passionvirus@gmail.com">Pyo</maintainer>
<license>Apache 2.0</license>
<author email="passionvirus@gmail.com">Pyo</author>
<author email="routiful@gmail.com">Darby Lim</author>
<buildtool_depend>ament_cmake</buildtool_depend>
**<buildtool_depend>rosidl_default_generators</buildtool_depend> # 인터페이스 전용 패키지에서 필수적인 의존성 패키지
<exec_depend>builtin_interfaces</exec_depend>
<exec_depend>rosidl_default_runtime</exec_depend>**
<member_of_group>rosidl_interface_packages</member_of_group>
<export>
<build_type>ament_cmake</build_type>
</export>
</package>
빌드 설정 파일
빌드 설정 파일(CMakeLists.txt) 작성/수정
set명령어로 msg, srv, action 파일을 지정해주고rosidl_generate_interfaces에 해당 셋들을 기입
################################################################################
# Set minimum required version of cmake, project name and compile options
################################################################################
cmake_minimum_required(VERSION 3.5)
project(msg_srv_action_interface_example)
if(NOT CMAKE_CXX_STANDARD)
set(CMAKE_CXX_STANDARD 14)
endif()
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -Wall -Wextra -Wpedantic")
endif()
################################################################################
# Find and load build settings from external packages
################################################################################
find_package(ament_cmake REQUIRED)
find_package(builtin_interfaces REQUIRED)
find_package(rosidl_default_generators REQUIRED)
################################################################################
# Declare ROS messages, services and actions
################################################################################
**set(msg_files
"msg/ArithmeticArgument.msg"
)
set(srv_files
"srv/ArithmeticOperator.srv"
)
set(action_files
"action/ArithmeticChecker.action"
)
rosidl_generate_interfaces(${PROJECT_NAME}
${msg_files}
${srv_files}
${action_files}
DEPENDENCIES builtin_interfaces
)**
################################################################################
# Macro for ament package
################################################################################
ament_export_dependencies(rosidl_default_runtime)
ament_package()빌드
$ cd ~/ros2_bashing
$ colcon build --symlink-install --packages-select msg_srv_action_interface_example- 구조
~/ros2_bashing/install/msg_srv_action_interface_example
├── include
│ └── msg_srv_action_interface_example
│ ├── action
│ ├── msg
│ └── srv
├── lib
│ └── python3.6
│ └── site-packages
│ └── msg_srv_action_interface_example
│ ├── action
│ ├── msg
│ └── srv
└── share
└── msg_srv_action_interface_example
├── action
├── msg
└── srv