실습 목표
1. OpenCV 기초: 이미지 로딩, 표시, 기본 처리 방법 학습
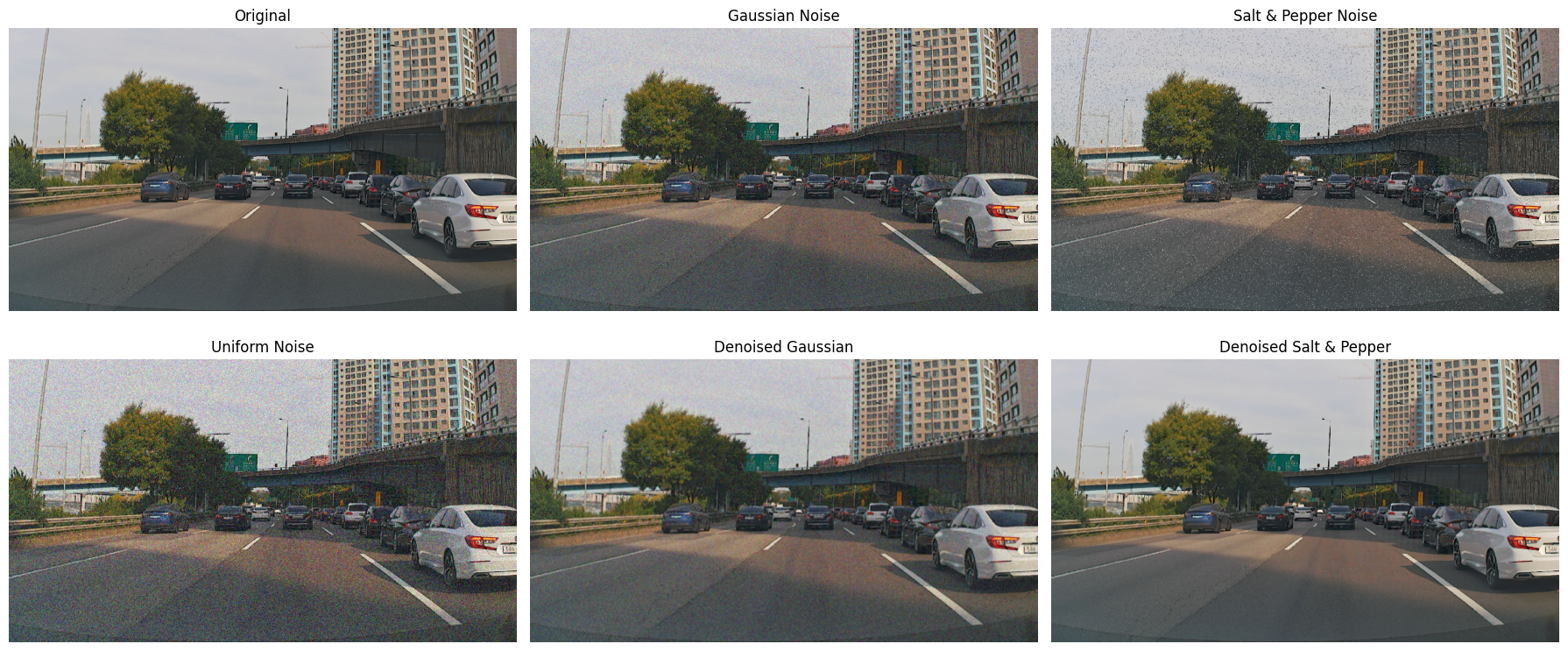
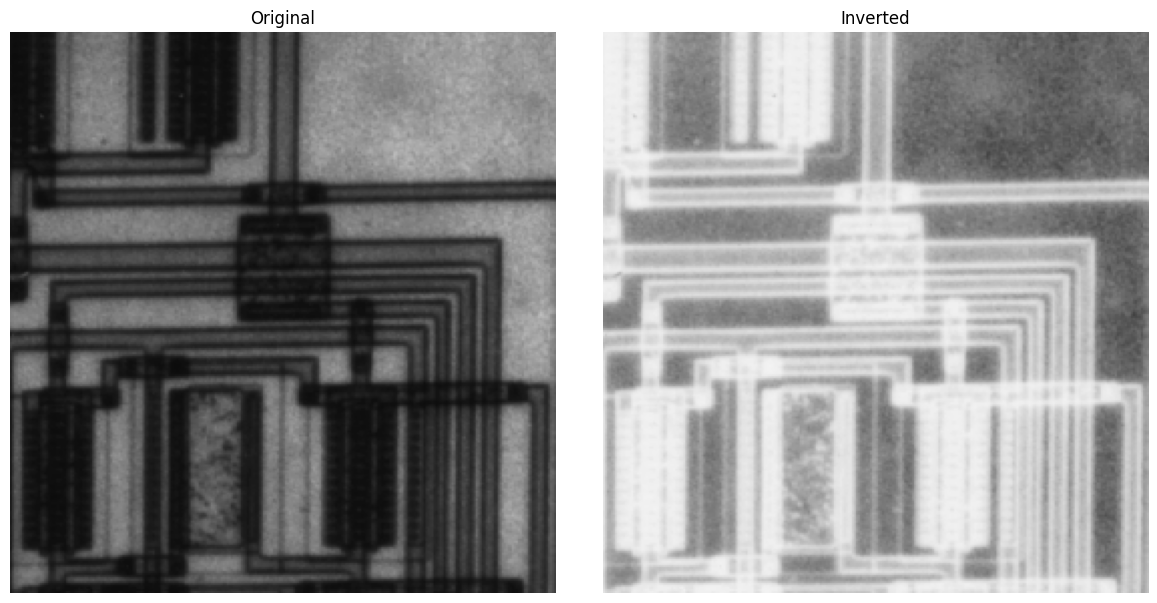
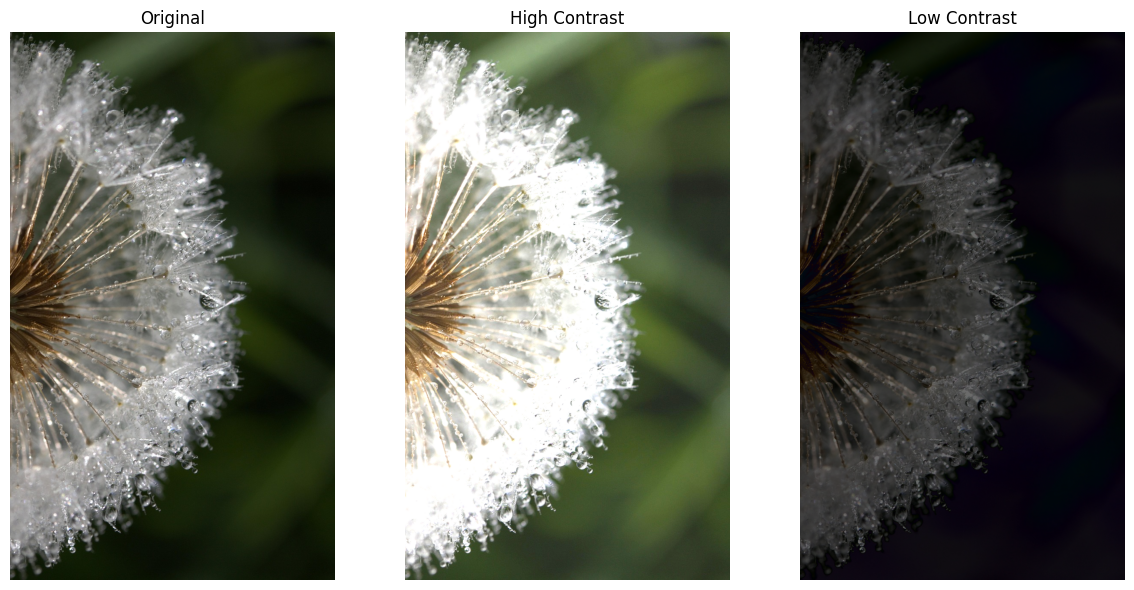
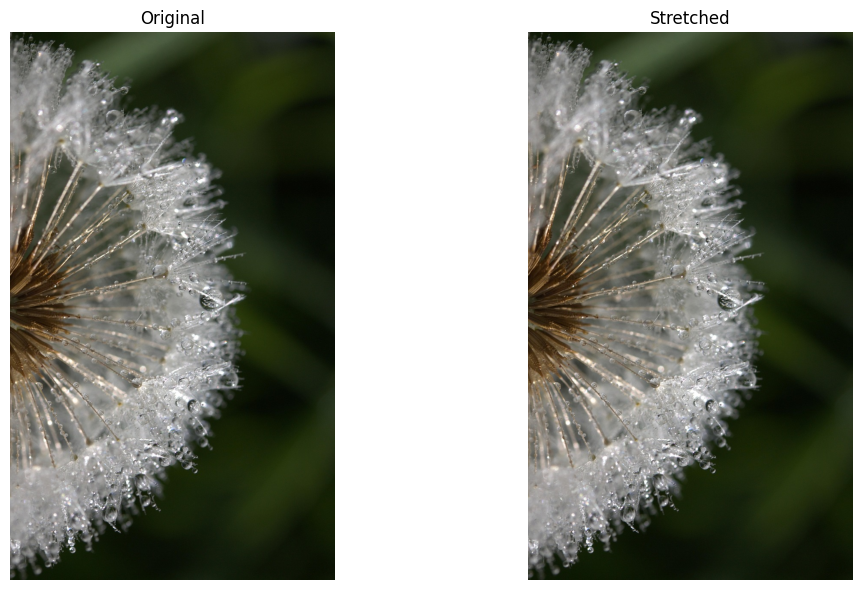
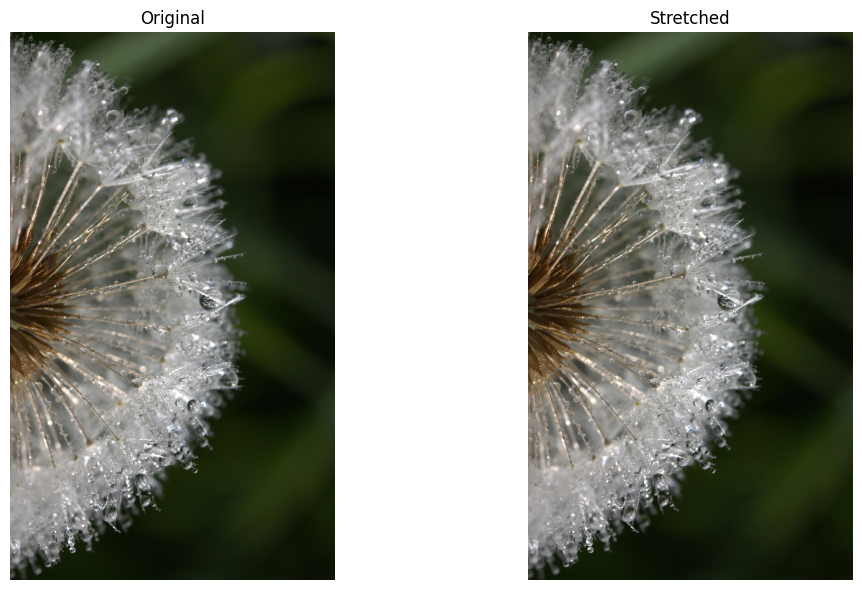
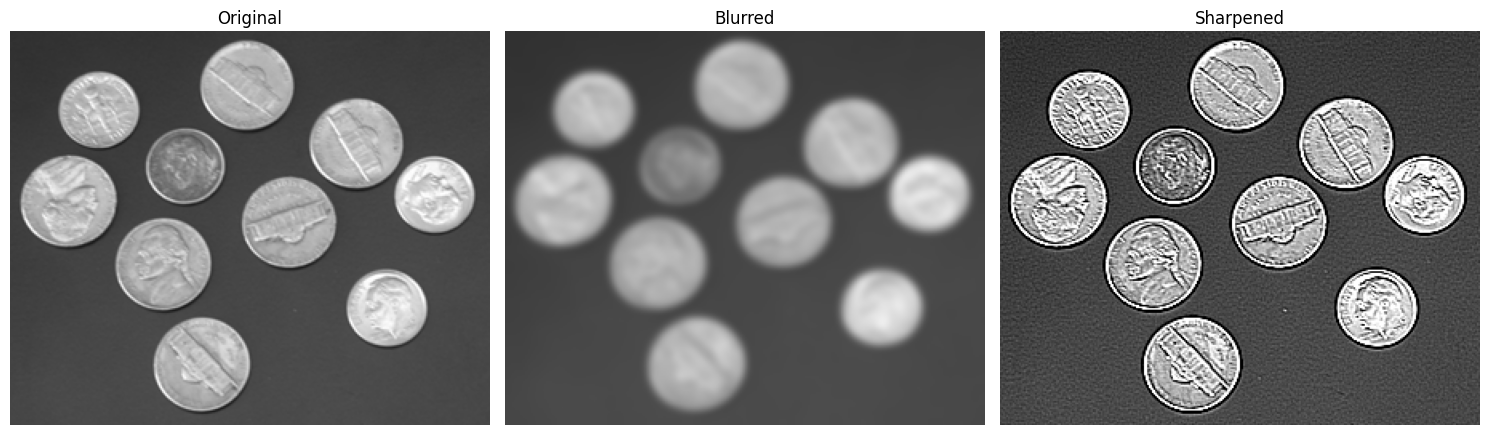
2. 이미지 전처리: 노이즈 제거, 대비 조정, 블러링 등 기본 이미지 처리
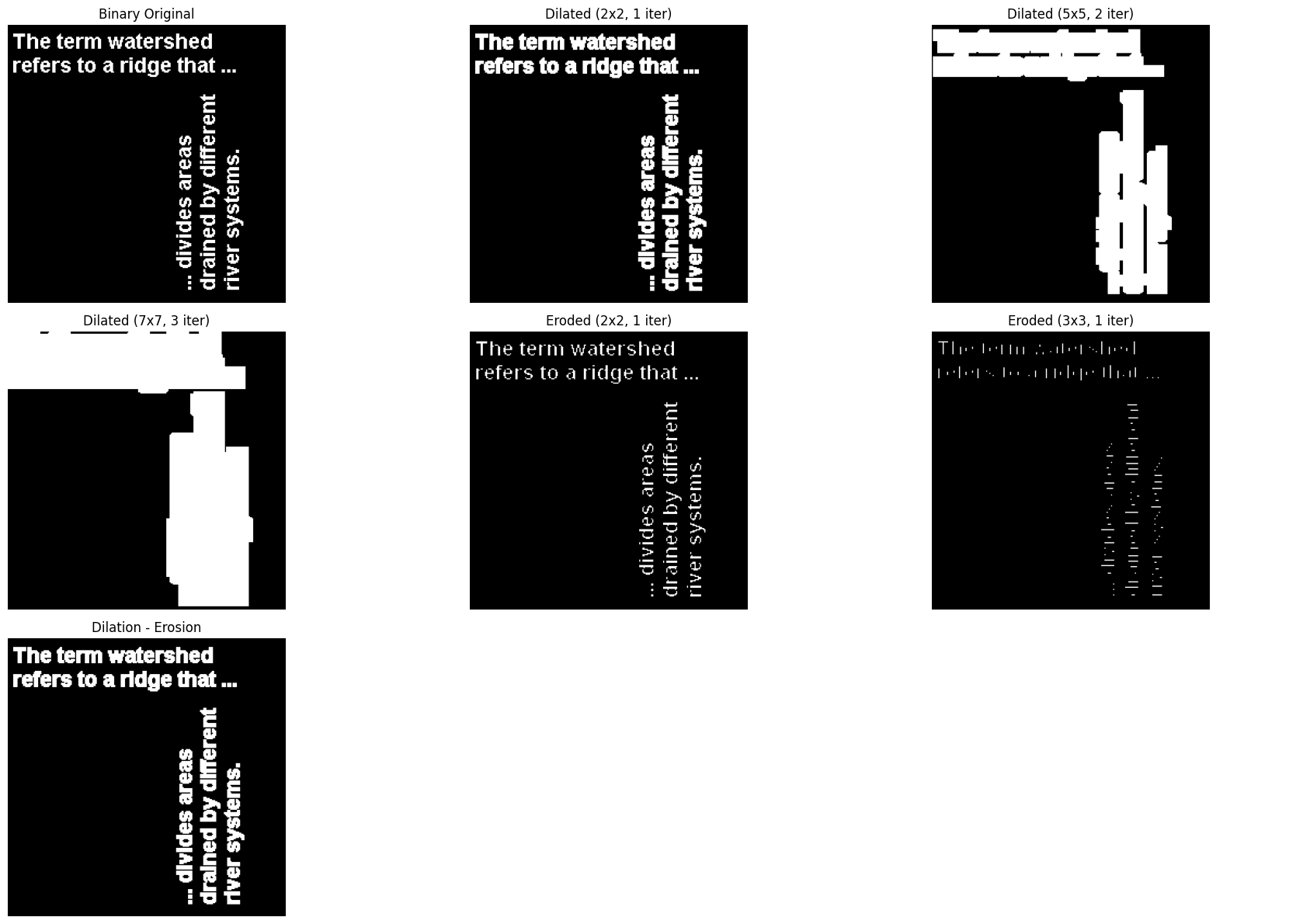
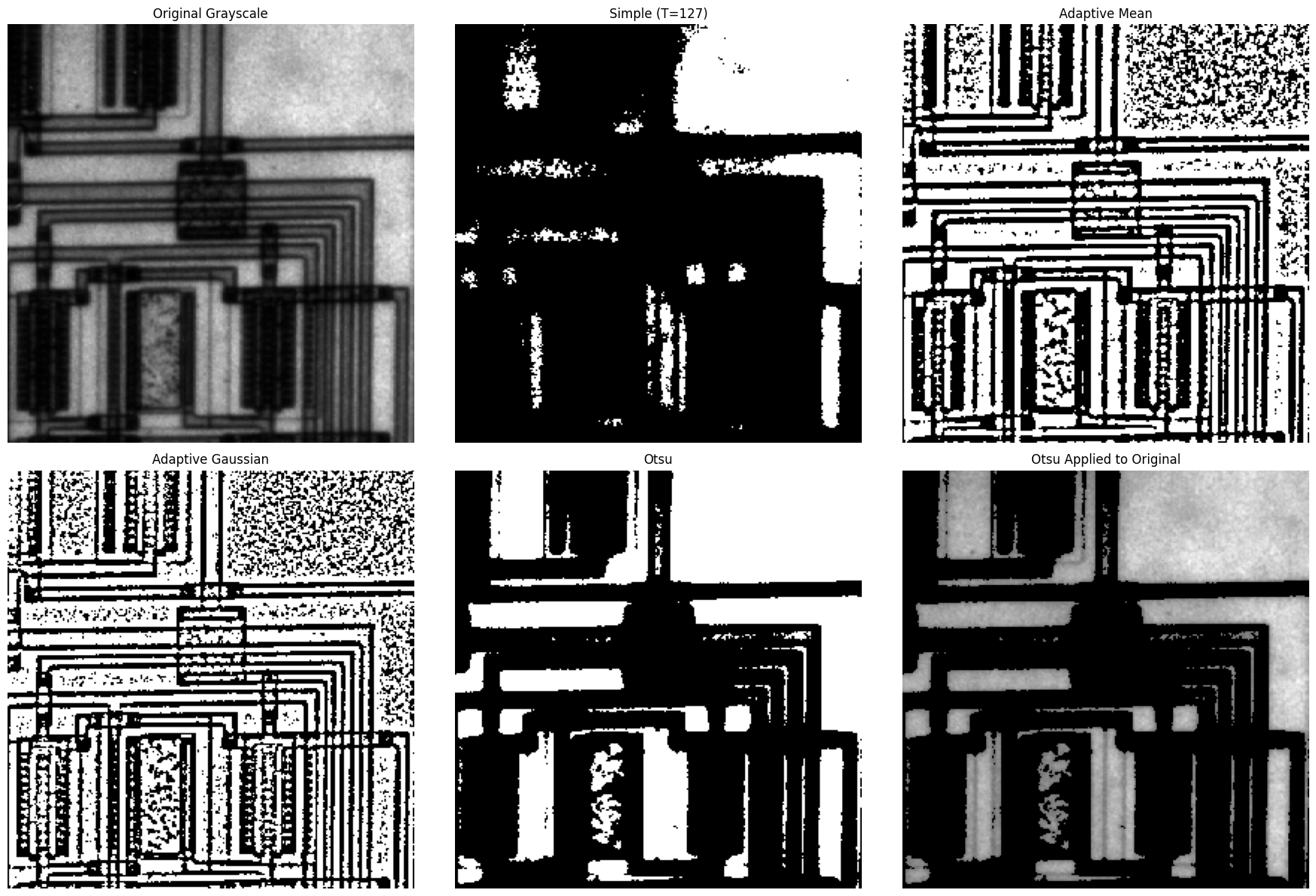
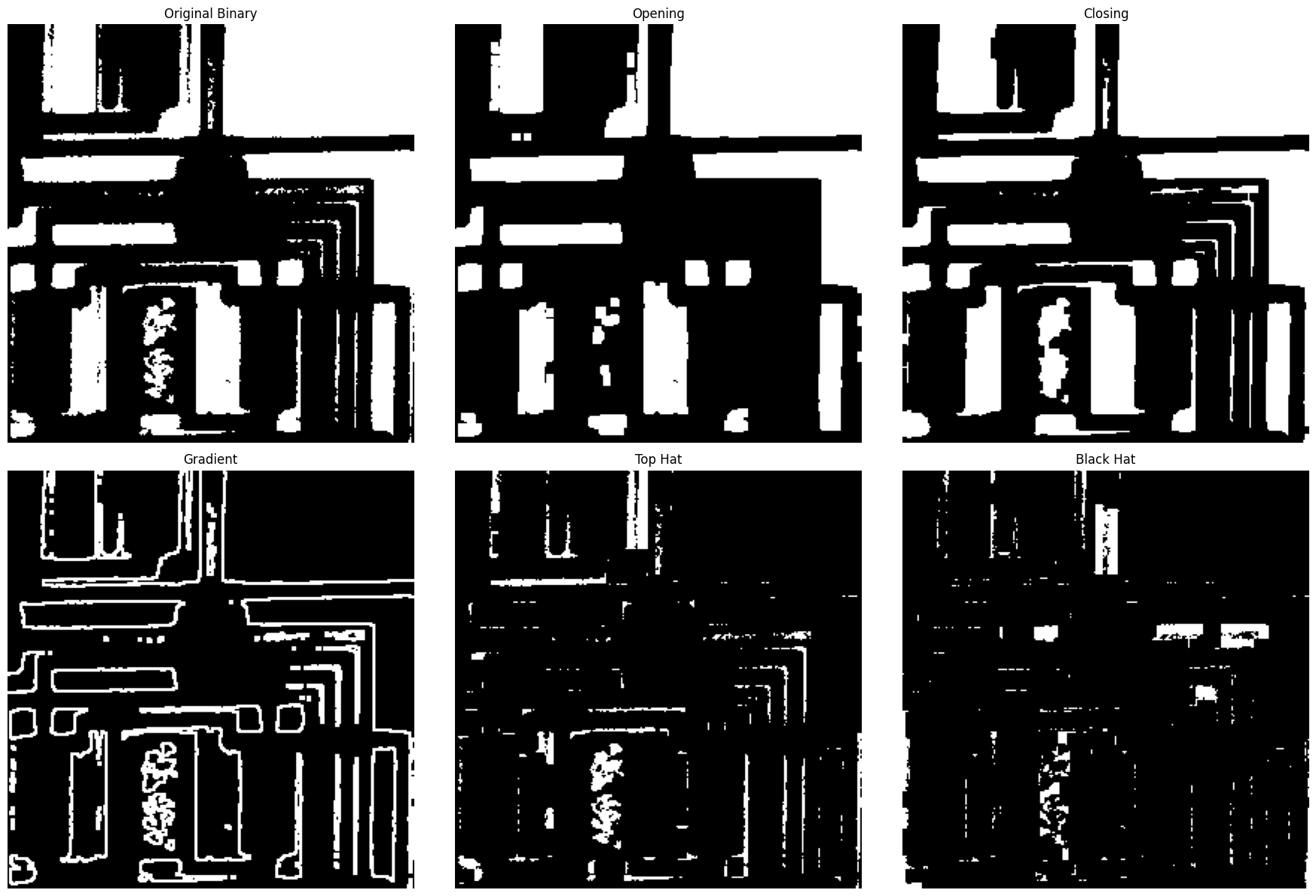
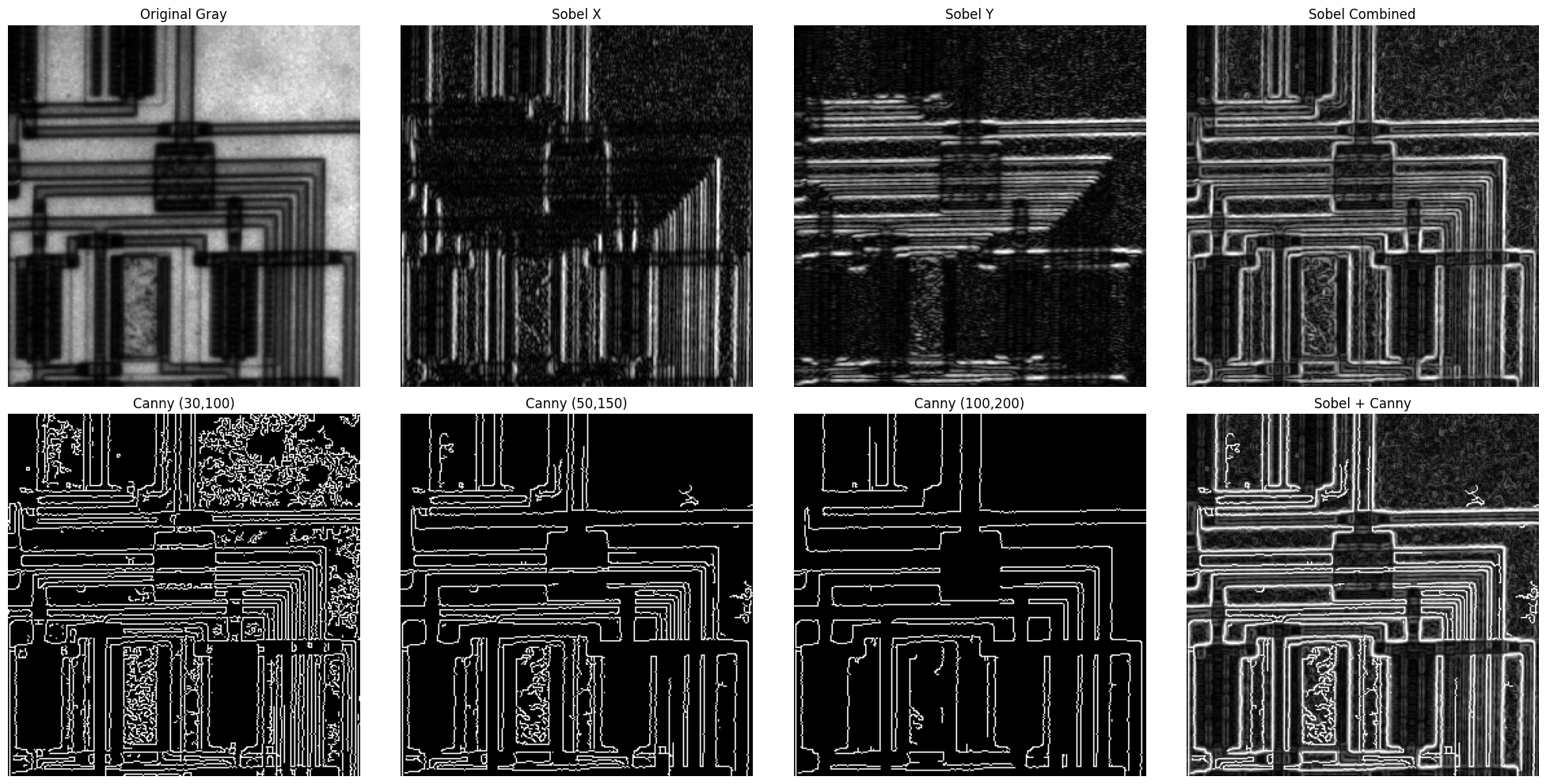
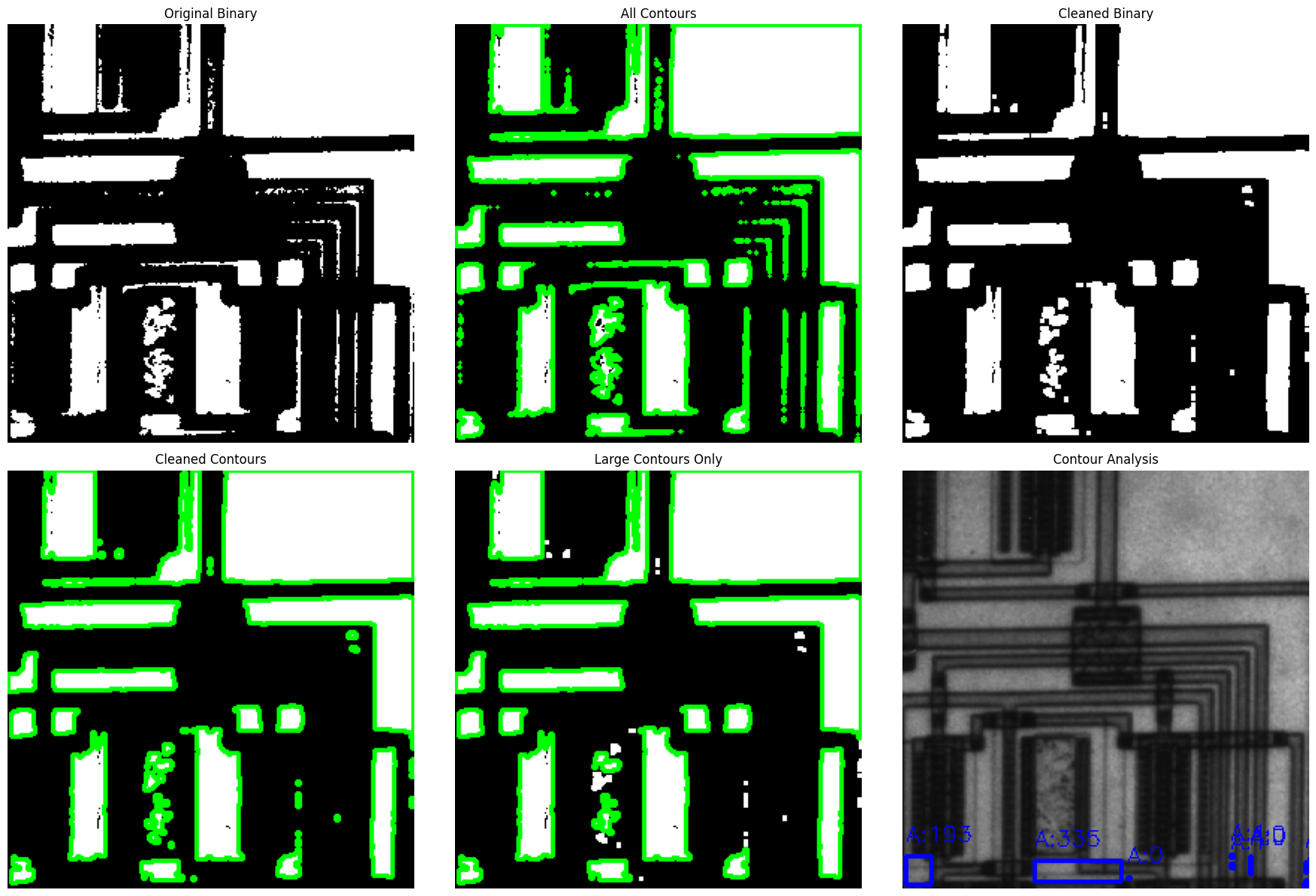
3. 고급 이미지 처리: 이진화, 모폴로지, 엣지 검출, 윤곽선 검출
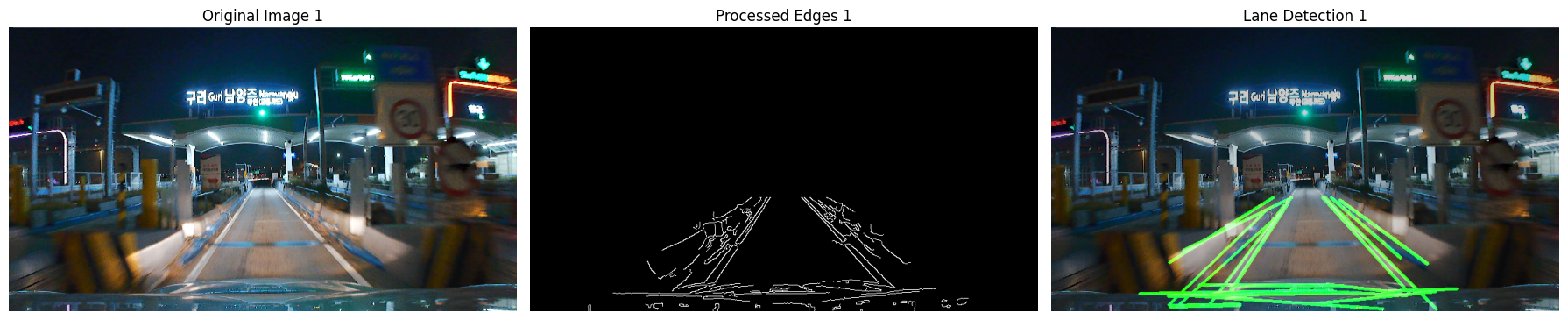
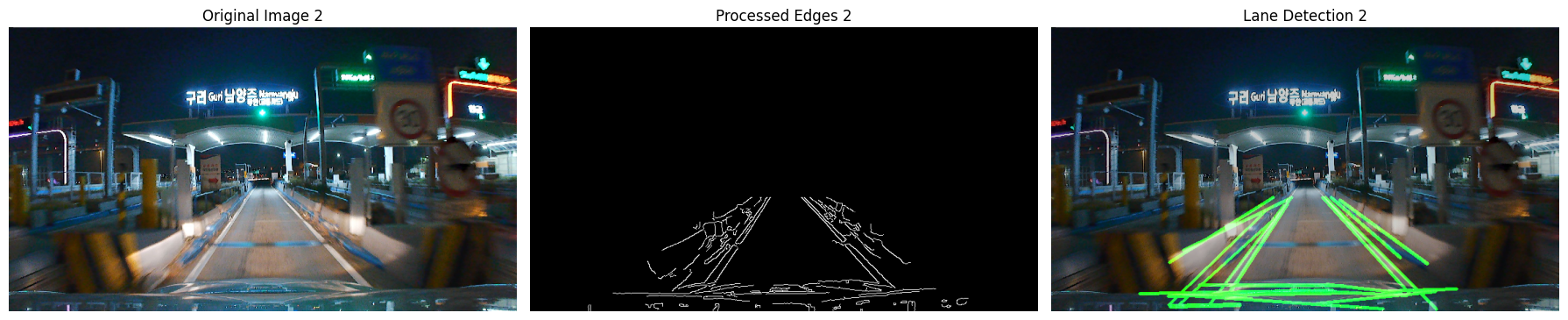
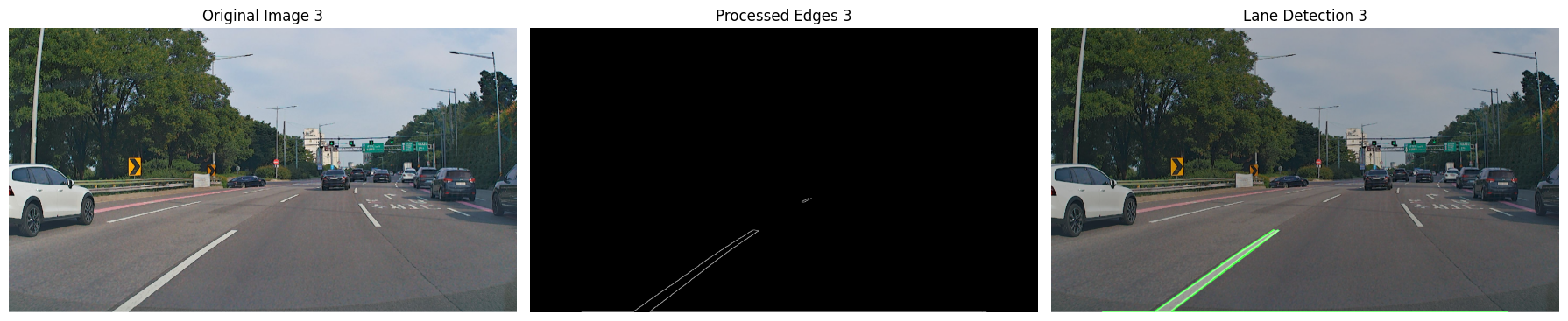
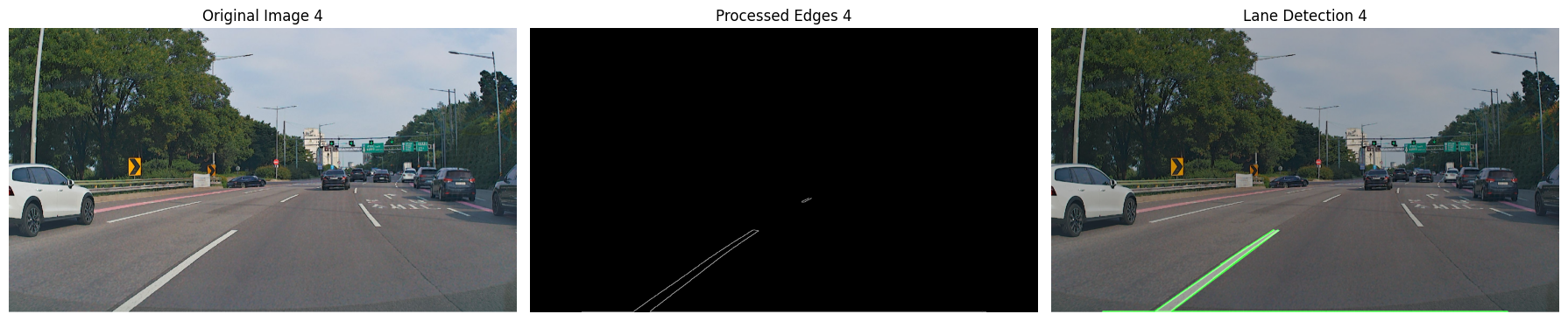
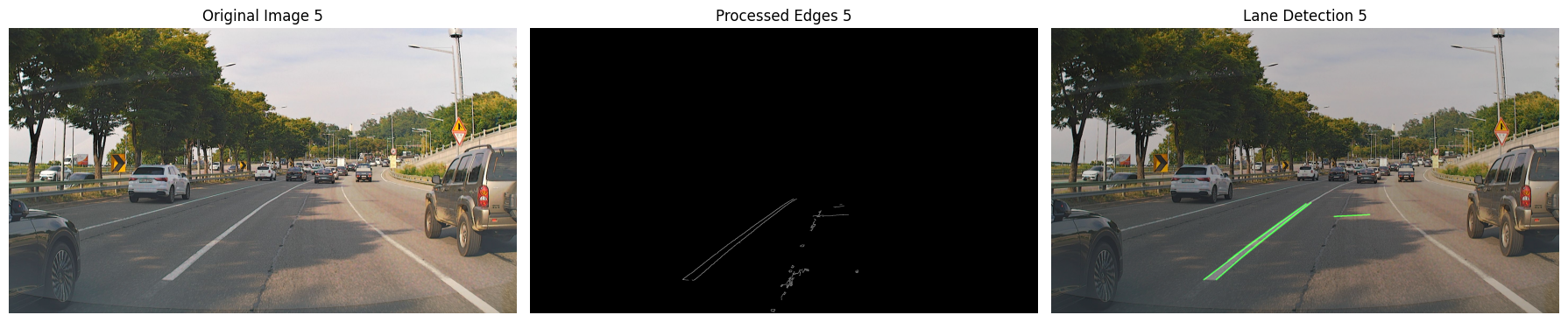
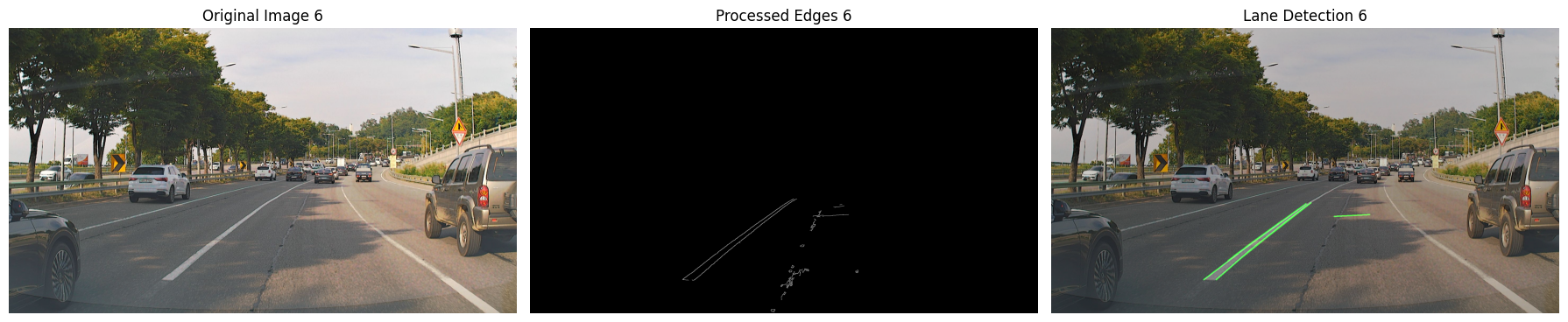
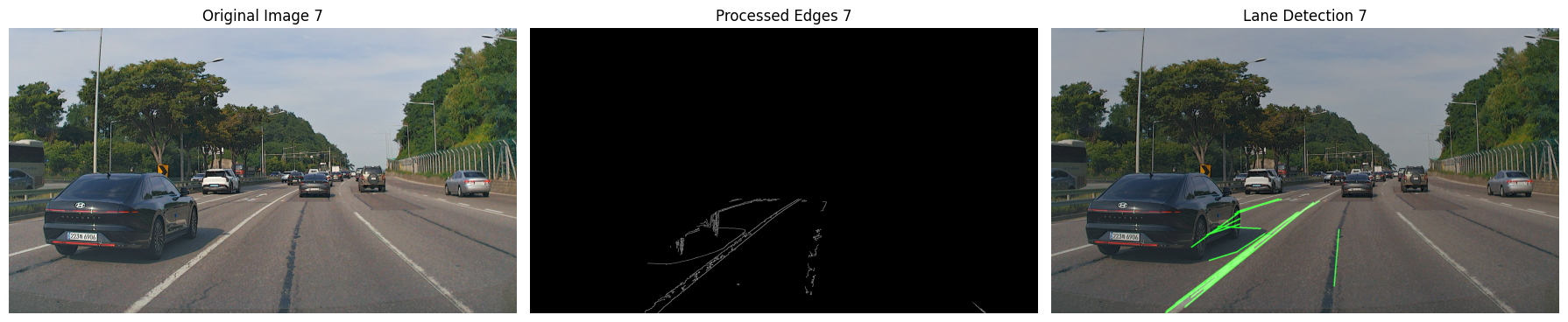
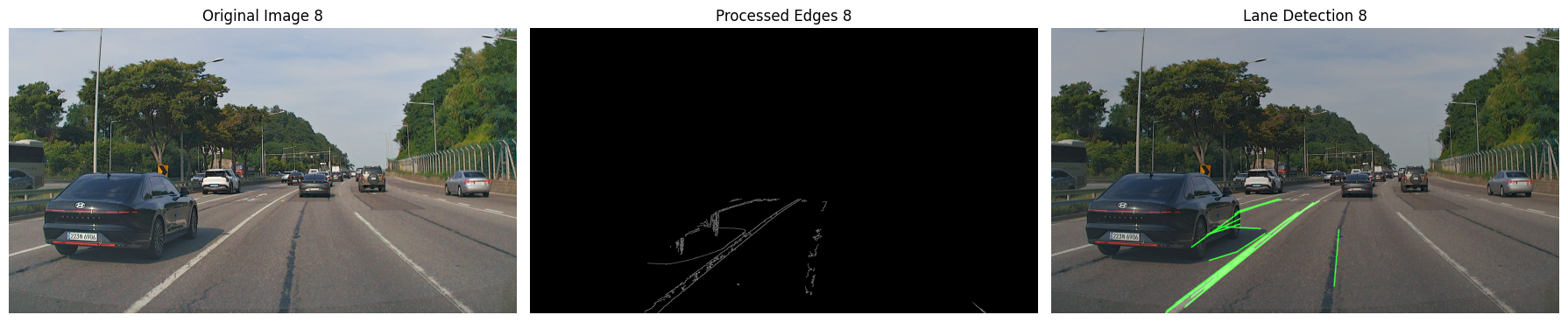
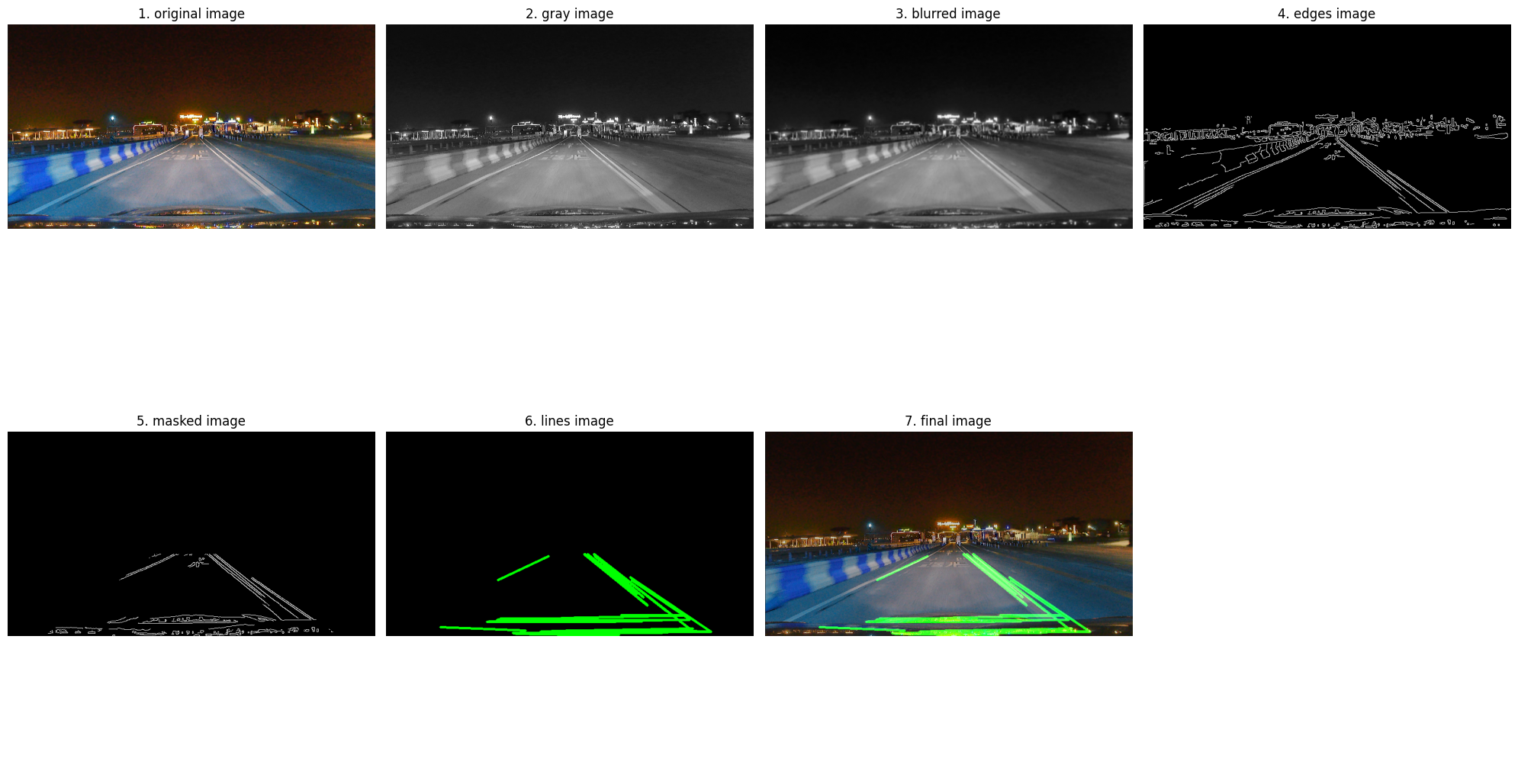
4. 차선 검출: 실제 도로 이미지에서 차선 정보를 도출
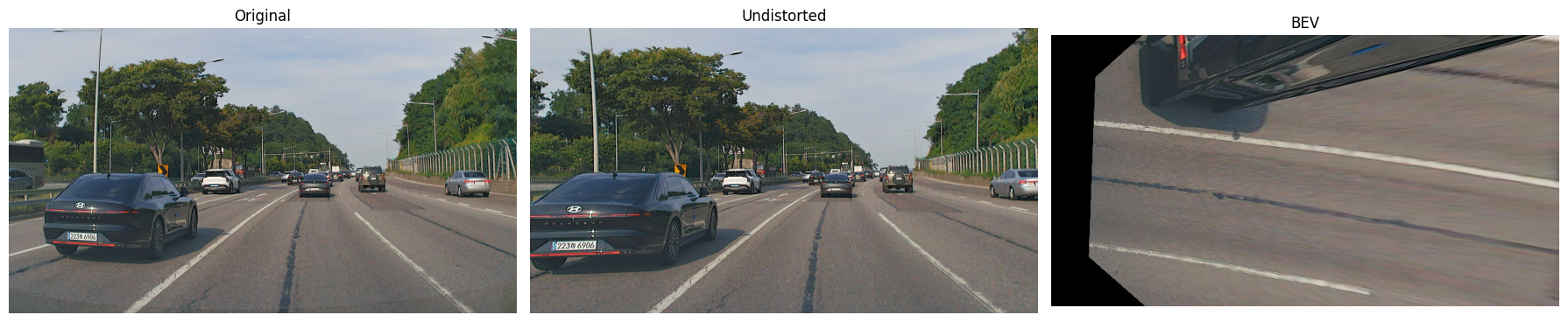
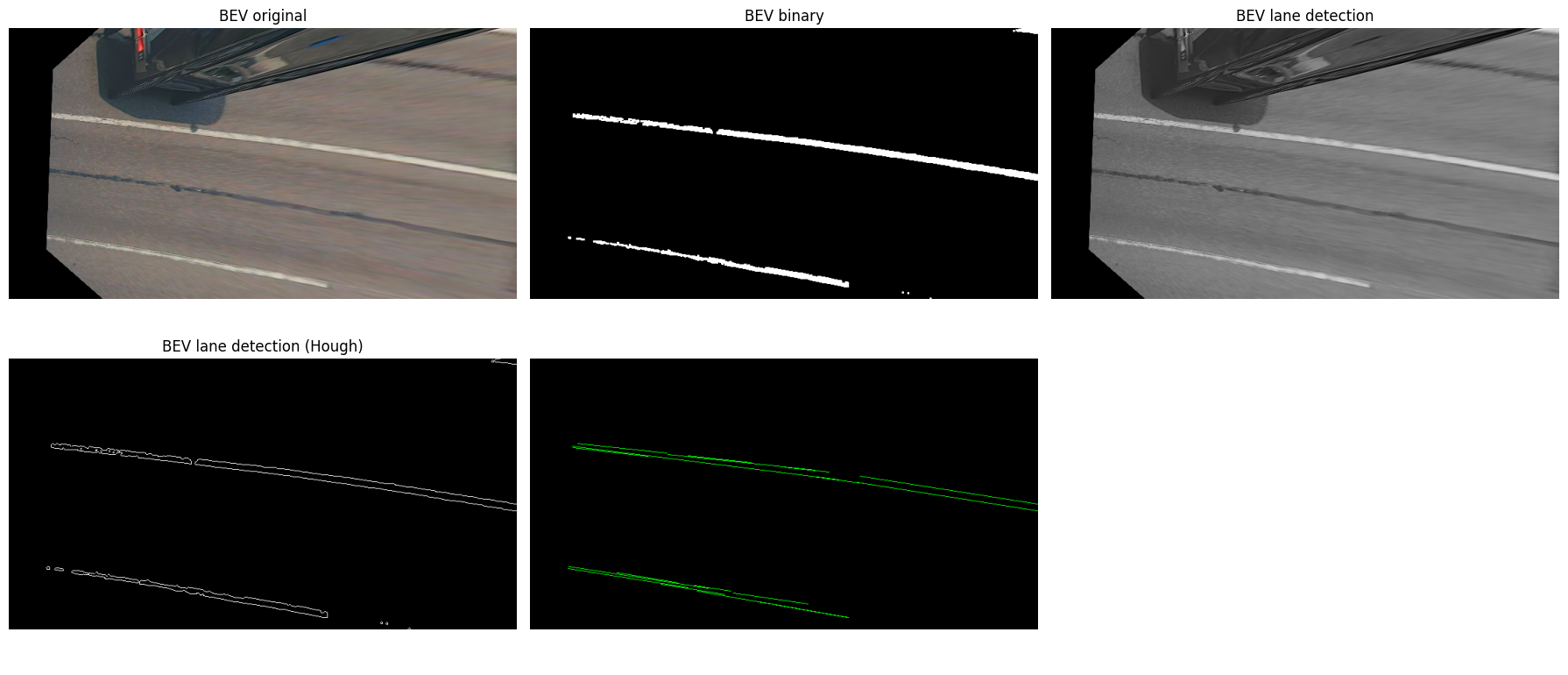
5. BEV 변환: 카메라 캘리브레이션 정보 활용한 Bird's Eye View 변환
카메라 센서의 중요성
- 자율주행에서의 카메라 역할
- 차선 인식: 차량이 주행해야 할 차선 검출
- 물체 검출: 다른 차량, 보행자, 신호등 등 인식
- 거리 추정: 스테레오 버전이나 단안 카메라 기반 거리 측정
- 상황 인식: 교통 표지판, 신호등 상태 등 판단
- 이미지 처리 필요성
- 환경 적응: 다양한 조명 조건 (주간, 야간, 흐림 등) 에서 안정적 동작
- 노이즈 제거: 센서 노이즈 및 환경적 노이즈 제거
- 특징 추출: 의미 있는 정보 (차선, 물체 등) 추출
- 실시간 처리: 빠른 의사결정 위한 효율적 알고리즘
- BEV 변환의 장점
- 직관적 표현: 위에서 내려다본 시점으로 거리 및 방향 파악 용이
- 정확한 측정: 실제 거리 기반의 정확한 측정
- 센서 융합: 다른 센서(LiDAR, Radar) 데이터와 통합 용이
실습 데이터
- 다양한 예시 이미지: 이미지 전처리 실습을 위한 기본적인 여러 예시 이미지들
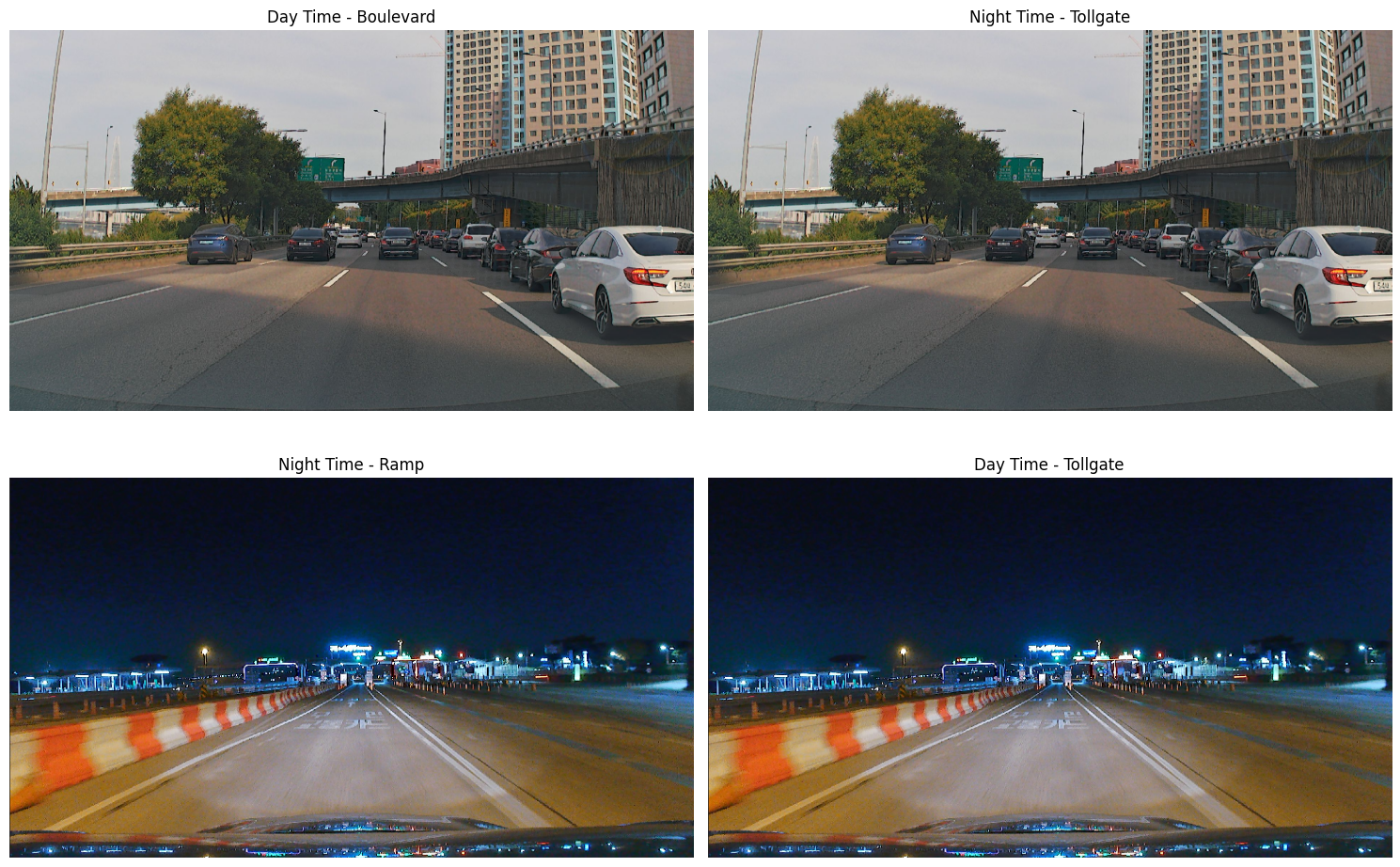
- 다양한 환경의 차량 카메라 이미지: 주간, 야간에서 취득한 차량 카메라 이미지
- 도로 이미지: 차량 검출을 위한 실제 도로 환경
- 카메라 캘리브레이션 정보: 내부/외부 파라미터
사용할 라이브러리
- OpenCV: 컴퓨터 비전 및 이미지 처리
- NumPy: 수치 연산 및 배열 처리
- Matplotlib: 결과 시각화