실습 목표
1. 칼만 필터 이론: 예측-업데이트 과정과 수학적 원리 이해
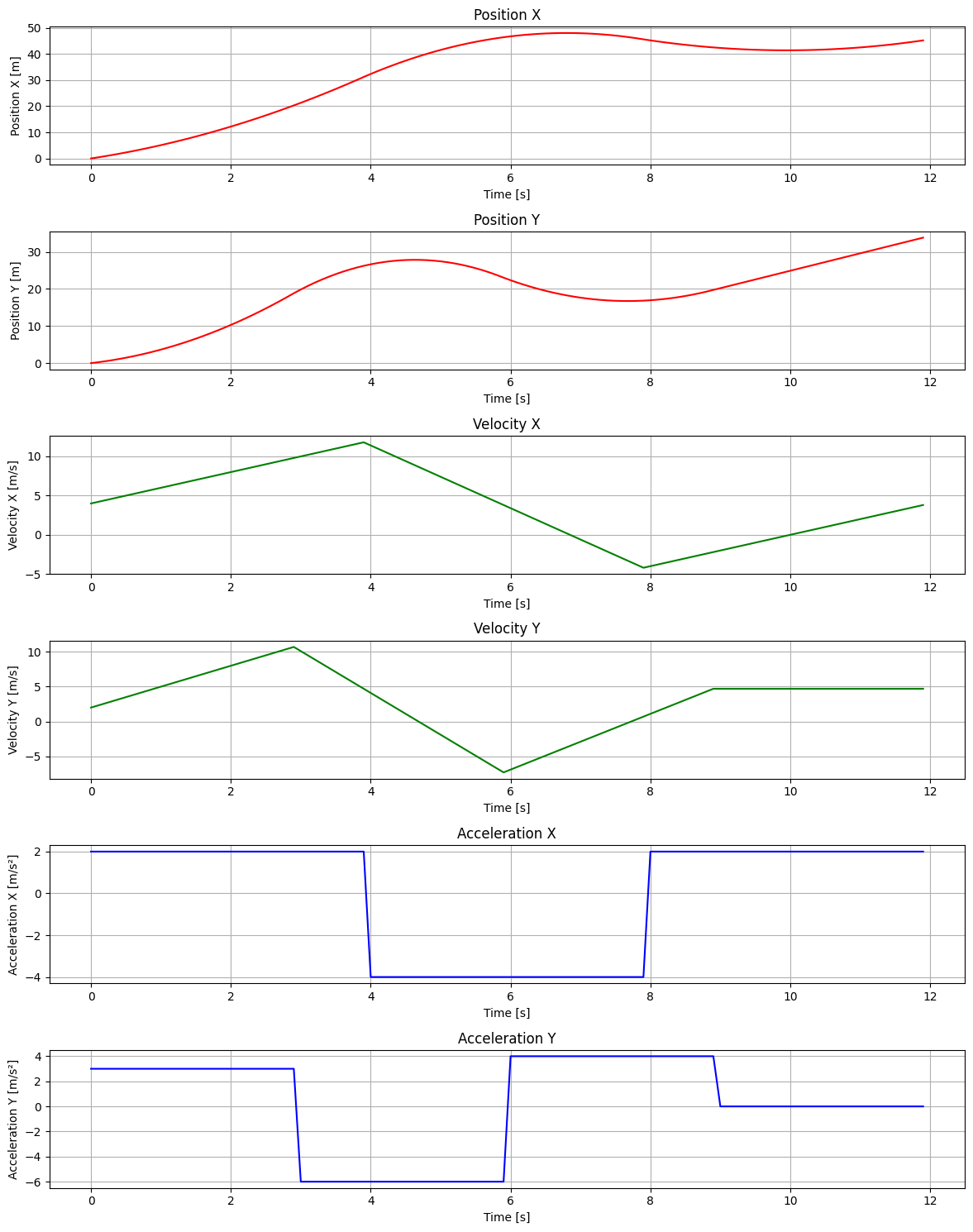
2. CA 모션 모델: 등가속도 운동 모델 기반 차량 동역학 모델링
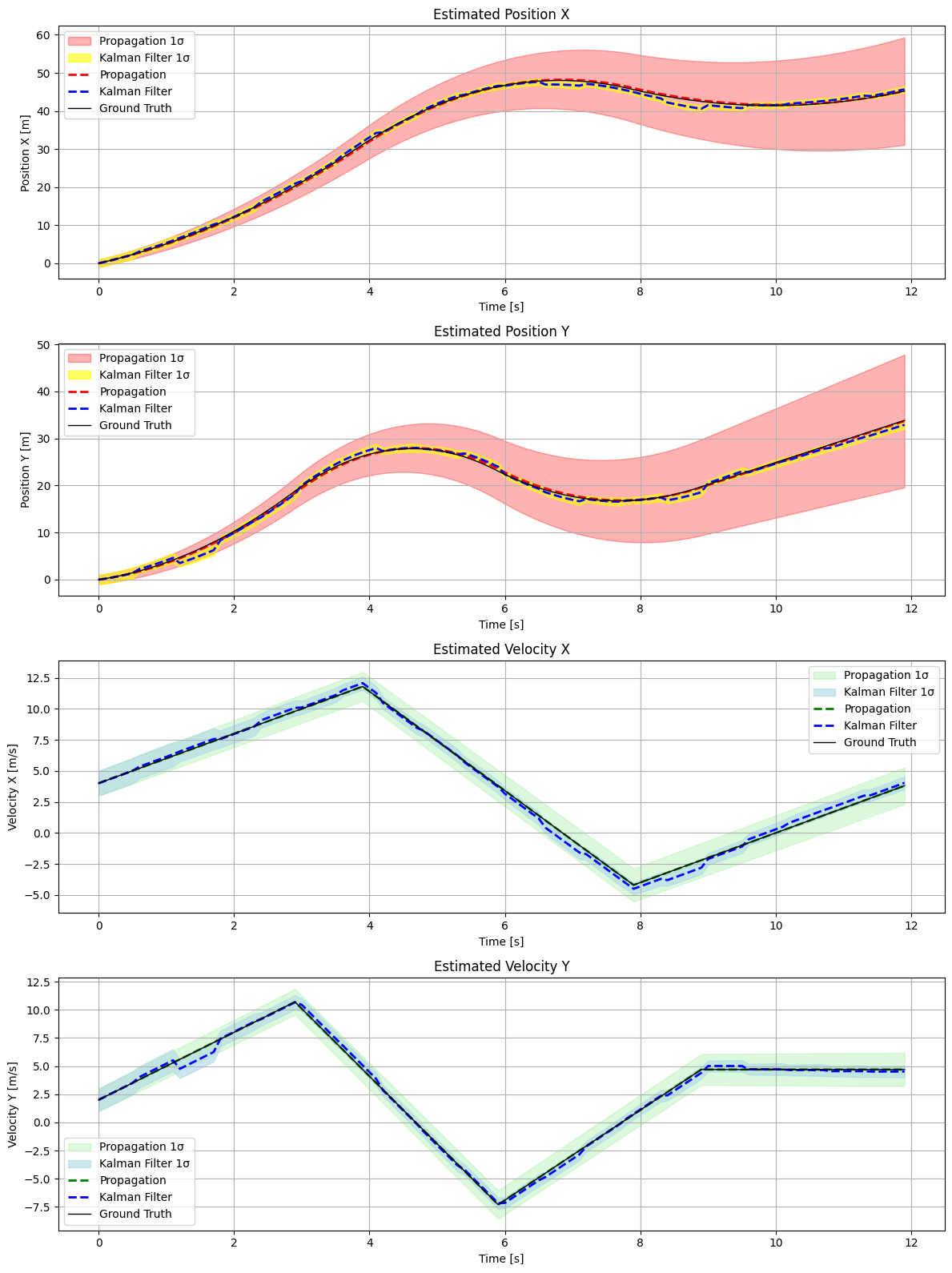
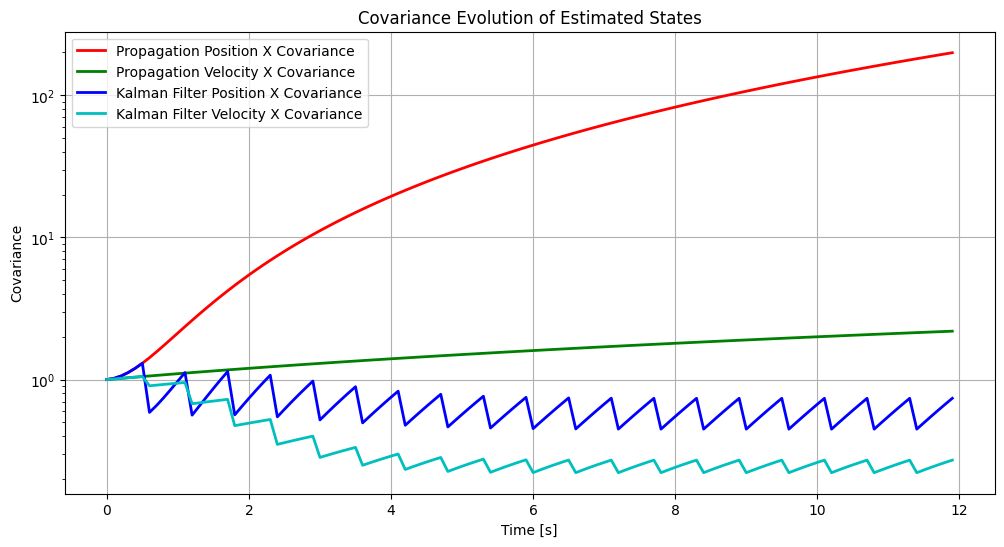
3. 불안전 시스템: 측정 없이 예측만 할 때 불확실성 증가 분석
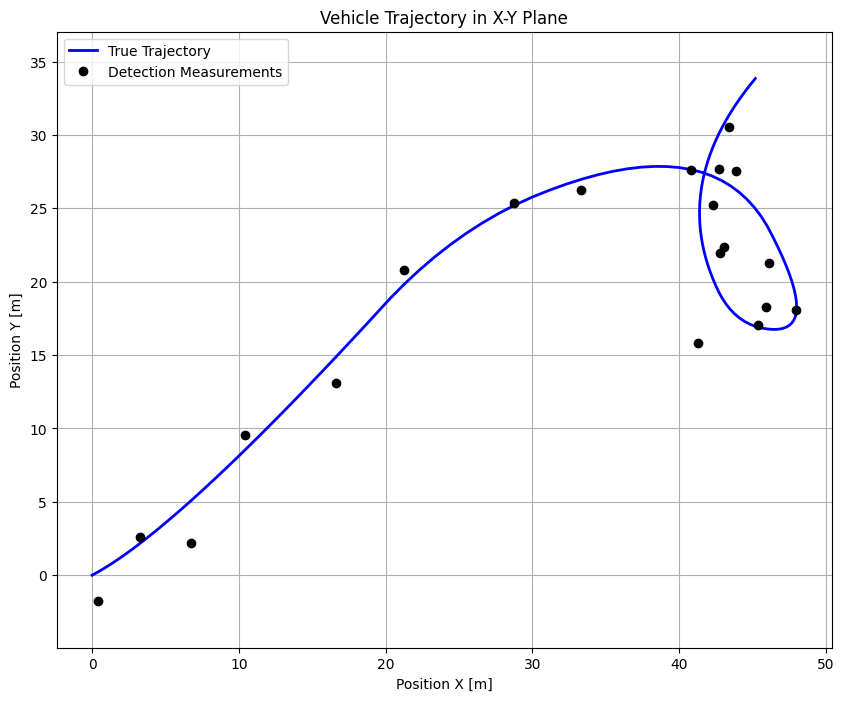
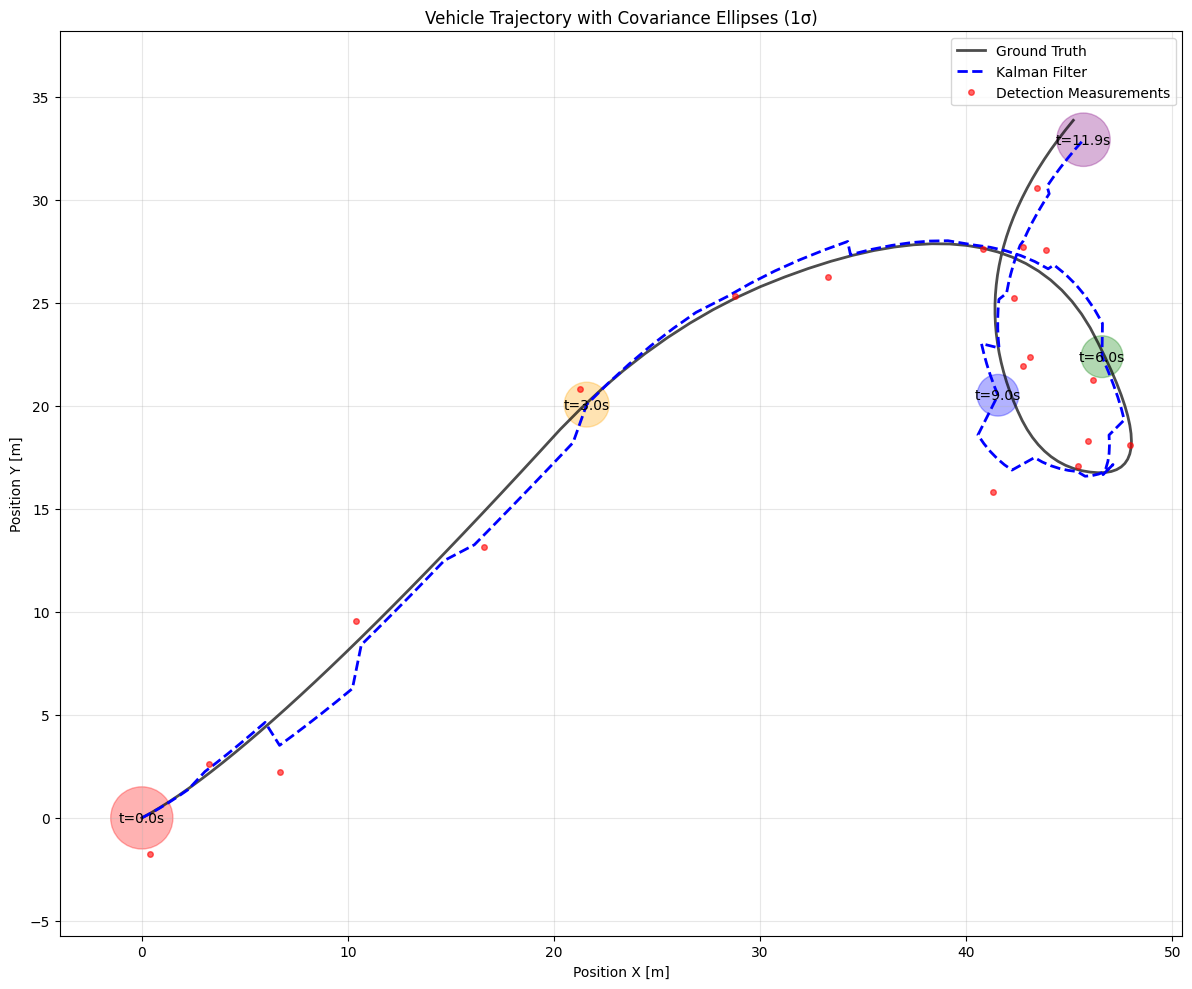
4. 상태 추정: 인지 센서 측정 활용한 차량 위치 및 속도 추정
5. 성능 비교: 단순 전파 vs. 칼만 필터 추정 성능 비교
칼만 필터의 중요성
- 자율주행에서의 역할
- 센서 융합: 다양한 센서 정보를 통합하여 정확한 상태 추정
- 노이즈 필터링: 센서 측정 노이즈를 효과적으로 제거
- 예측과 보정: 동역학 모델 예측과 측정 기반 보정의 최적 결합
- 실시간 처리: 효율적인 연산으로 실시간 상태 추정 가능
- 불안전 시스템의 특성
- 발산 특성: 측정 없이는 불확실성이 지속적으로 증가
- 관측 가능성: 시스템 상태가 측정을 통해 추정 가능한지 판단
- 칼만 필터의 안정화: 적절한 측정을 통해 불안정한 시스템도 안정화
- CA (Constant Accelation) 모델
- 2차 동역학: 위치, 속도에 더해 가속도까지 고려
- 차량 동역학: 실제 차량의 운동을 잘 모사하는 모델
- 입력 처리: 가속도 입력을 통한 제어 고려
실습 내용
- 시뮬레이션 데이터: 12초간의 2D 차량 운동 시뮬레이션
- 인지 센서 측정: 0.6초마다 객체 위치 측정 (노이즈 포함)
- 상태 벡터: [x, y, vx, vy] (위치와 속도)
- 측정 벡터: [x_meas, y_meas] (측정된 위치)
사용할 라이브러리
- NumPy: 수치 연산 및 행렬 계산
- Matplotlib: 결과 시각화 및 애니메이션
- SciPy: 수치 적분 및 과학 계산
애니메이션 확인하기
