실습 목표
1. NMEA 데이터 분석: NMEA 로그 파일에서 GGA와 RMC 메시지 피싱하고 분석
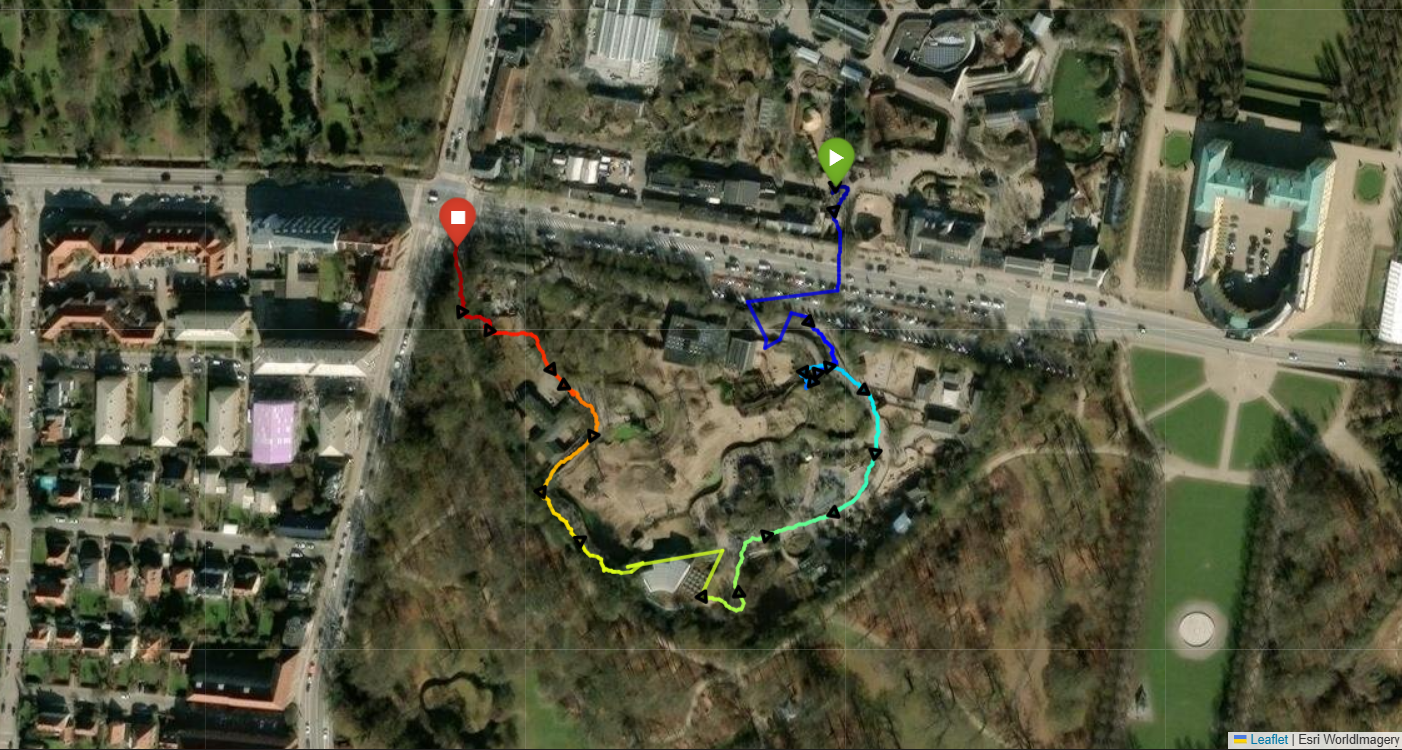
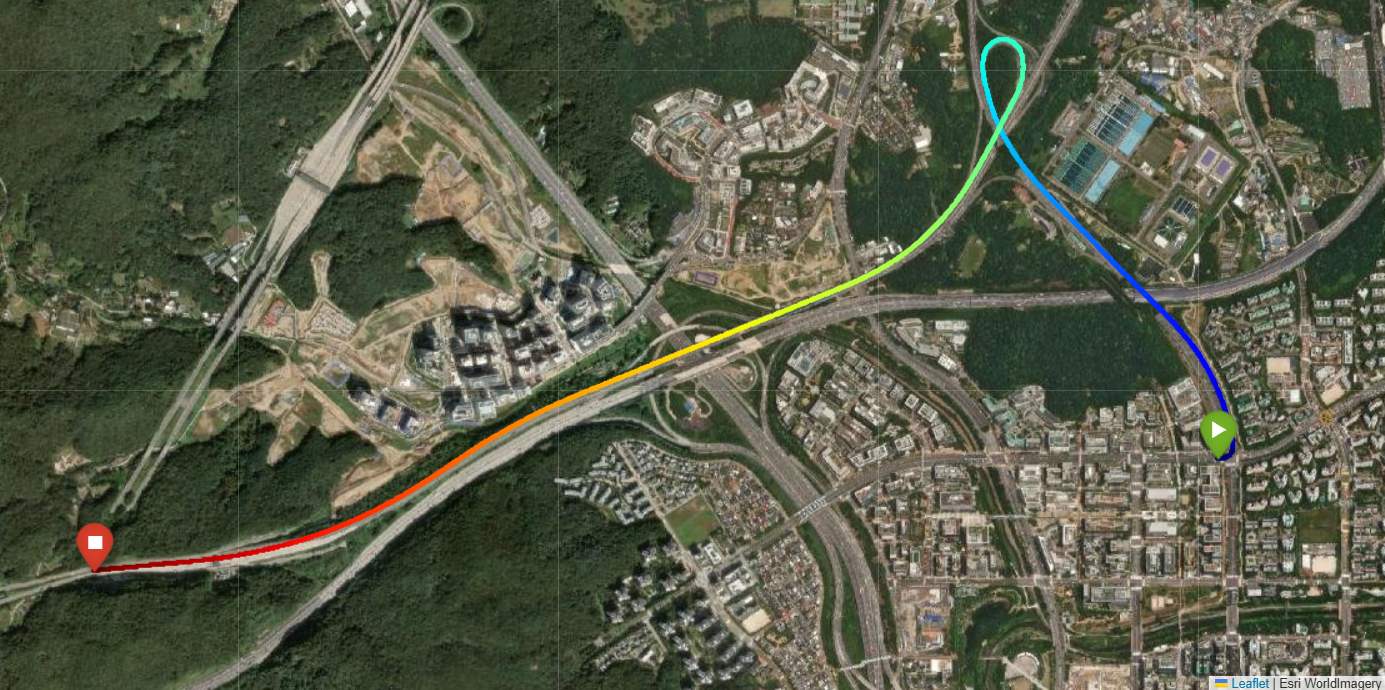
2. 위성 지도 시각화: GPS 궤적을 실제 위성 지도 위에 시각화
3. ROS bag GNSS 데이터 분석: 직접 취득한 GNSS 데이터 분석
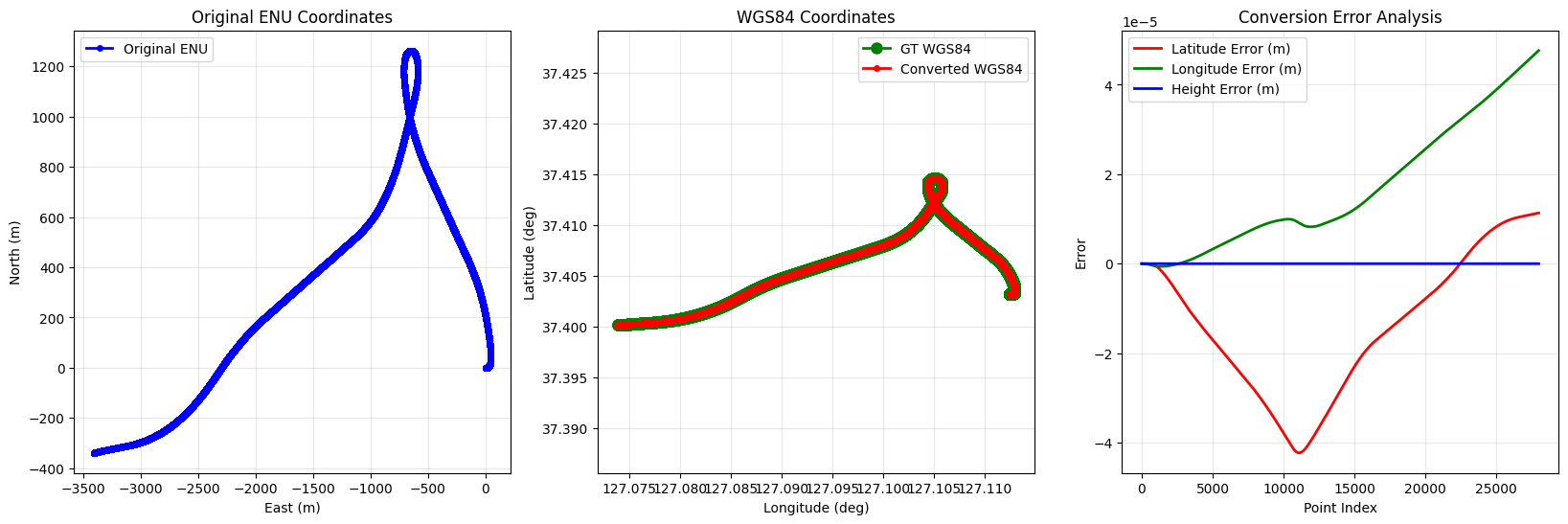
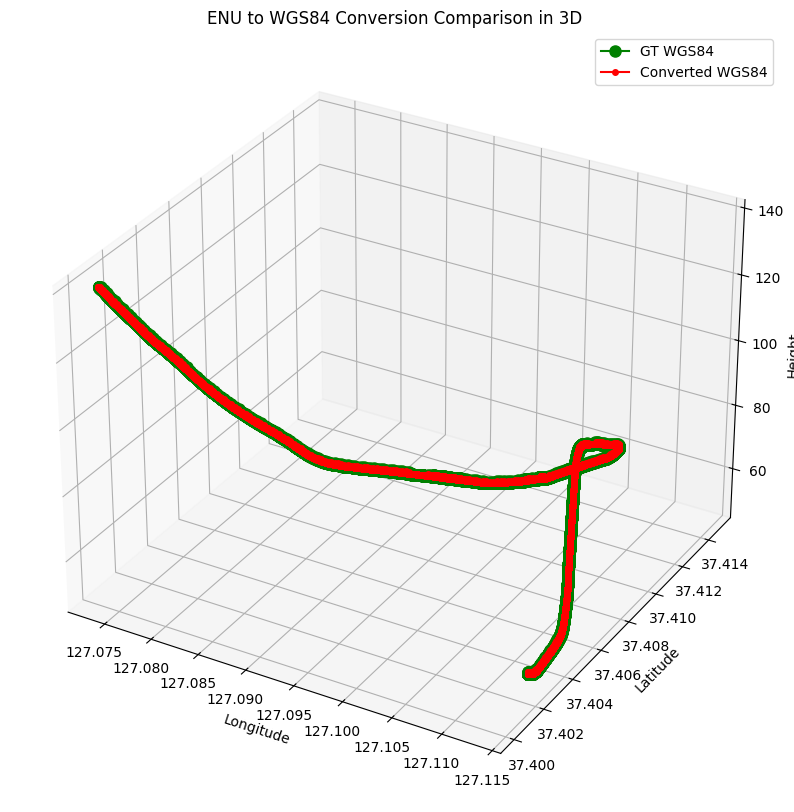
4. 좌표 변환: WGS84와 ENU 좌표계 간 변환을 구현하고 검증
다루는 GNSS 데이터
- NMEA GGA: 위치, 고도, HDOP, 위성 수 등 기본 위치 정보
- NMEA RMC: 위치, 속도, 방향, 상태 등 항법 정보
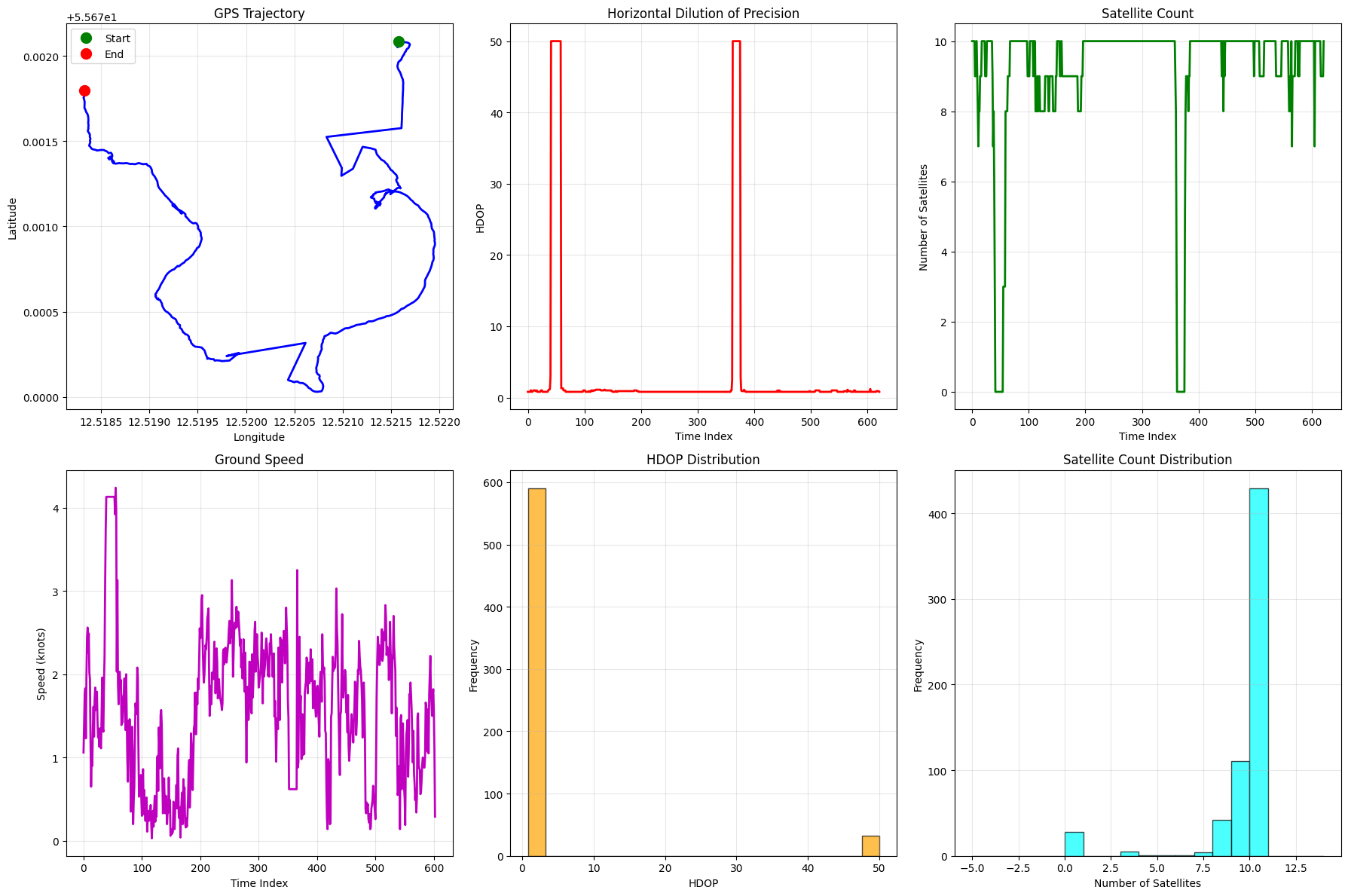
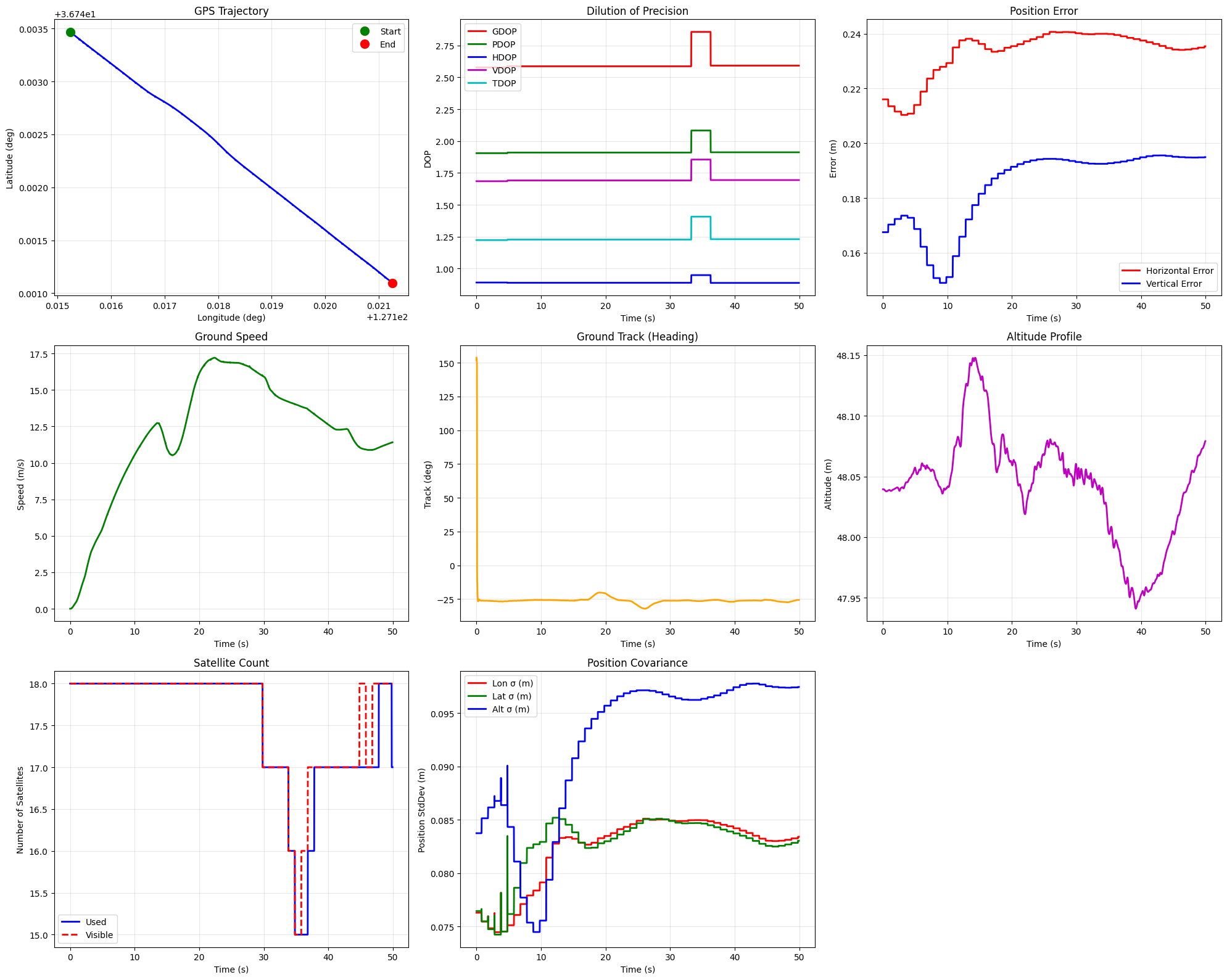
- 직접 취득한 GPS 데이터: 위치, 속도 정보 및 정확도 지표
+ 위치 정보: latitude, longitude, altitude- 정확도 지표: DOP 값들 (GDOP, PDOP, HDOP, VDOP, TDOP)
- 오차 정보: err_horz, err_vert, position_convariance
- 운동 정보: speed, track (heading)
GNSS 실습 필요성
자율주행에서 GNSS의 역할
- 절대 위치 추정: 차량의 정확한 지구상 위치 파악
- 경로 계획: 목적지까지의 최적 경로 생성
- 맵 매칭: 디지털 지도와 실제 위치 연계
- 센서 퓨전: IMU와 같은 다른 센서들과 결합하여 정확도 향상
GNSS 데이터 품질 평가
- DOP 분석: 위성 배치에 따른 정확도 평가
- 공분산 행렬: 위치 불확실성 정보 평가
- 위성 상태 모니터링: 가용 위성 수 분석
- 실시간 품질 모니터링: 연속적인 정확도 평가
좌표계 변환의 중요성
- 지역 좌표계 활용: 차량 주변 환경을 직관적으로 표현
- 센서 통합: 다양한 센서 데이터를 일관된 좌표계에서 처리
- 정밀 제어: 상대적 위치 기반 정밀 차량 제어
실습 데이터
- NMEA 로그 파일: 표준 GPS 수신기 출력 데이터
- ROS bag 파일: 직접 취득한 /gps/gps 토픽의 GPS Fix 데이터


실습 요약 및 결론
- NMEA 데이터 분석
- GGA와 RMC 메시지 파싱 및 분석
- HDOP, 위성 수, 속도 등 품질 지표 평가
- Fix Quality와 Navigation Status 이해
- 위성 지도 시각화
- 실제 위성 지도 위에 GPS 궤적 표시
- 시간에 따른 색상 변화로 경로 진행 시각화
- 헤딩 방향 화살표로 차량 방향 표시
- 실제 취득 GNSS 데이터 분석
- GNSS 수신기의 메시지 분석
- 정확도 지표 확인
- 다양한 소룰션 타입과 상태 모니터링
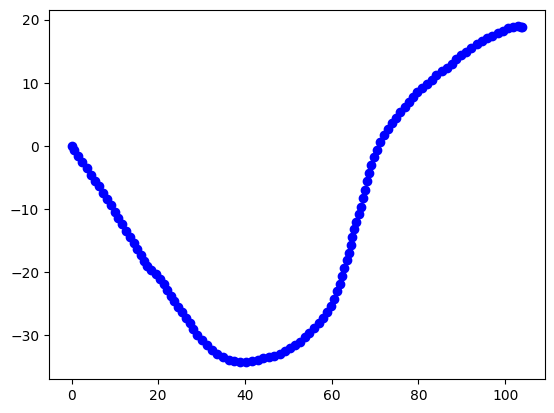
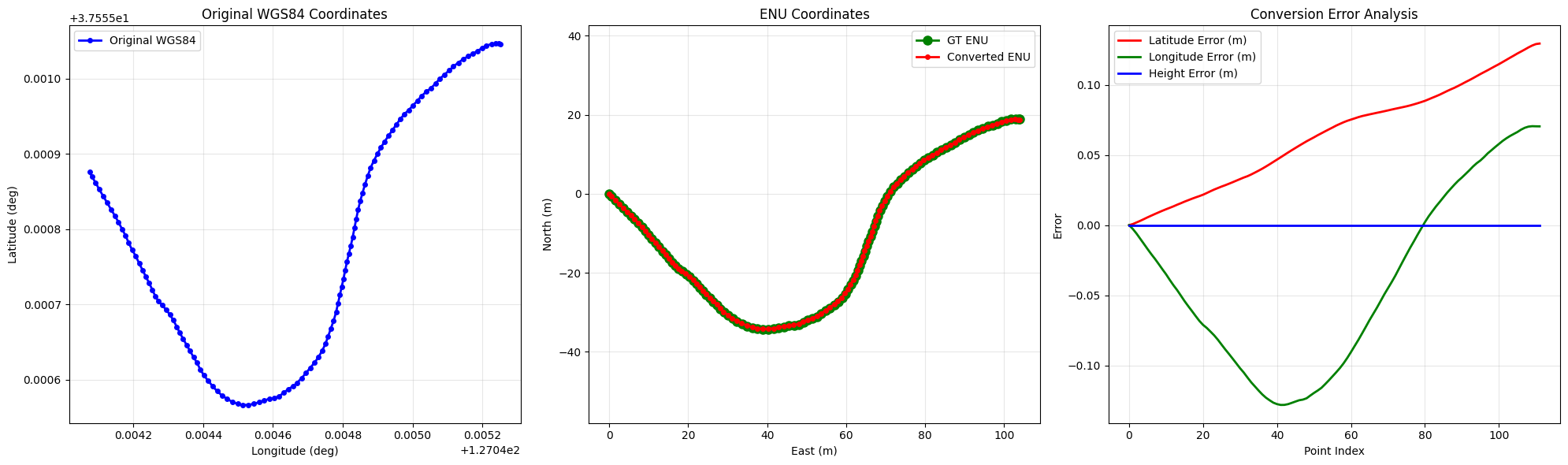
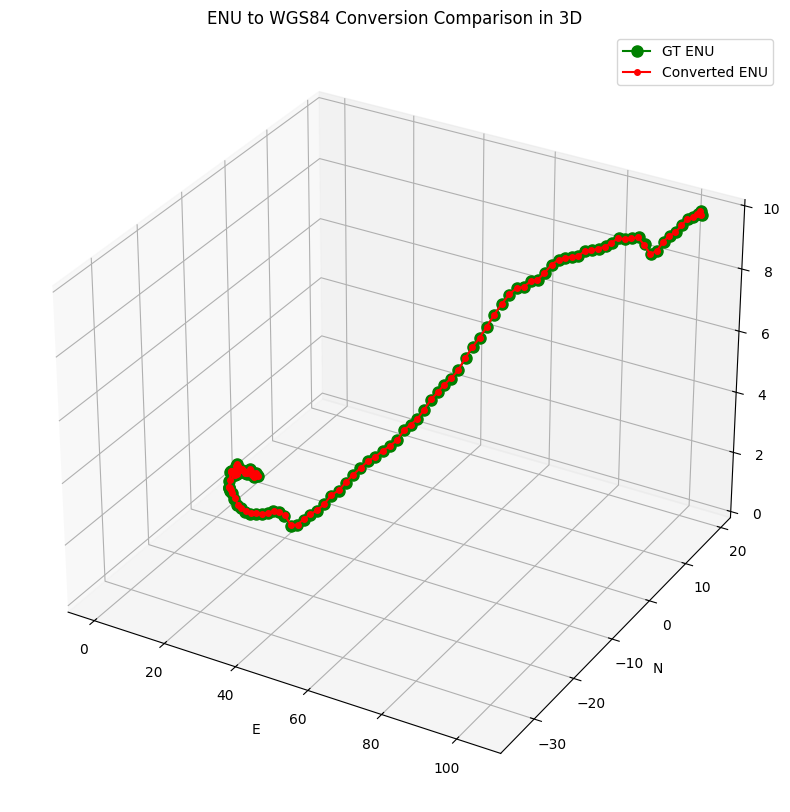
- 좌표 변환 (WGS84 <-> ENU)
- 전역 좌표계와 지역 좌표계 간 변환 구현
- 지구 타원체 곡률반지름 계산
- 변환 정확도 검증 및 오차 분석
자율주행에서의 GNSS 활용
- 위치 인식: 차량의 절대적 위치 파악으로 지도 기반 항법
- 경로 계획: 목적지까지의 글로벌 경로 생성
- 센서 퓨전: 카메라, 라이다 등과 결합하여 정확도 향상
- 안전 시스템: GPS 기반 지오펜싱 및 위험 구역 회피
- V2X 통신: 다른 차량 및 인프라와 위치 정보 공유
GNSS 데이터 품질 평가 기준
- 정확도 지표
- HDOP < 2.0: 우수한 정확도
- Standard Deviation < 1m: 일반 GPS 수준
- Standard Deviation < 0.1m: 고정밀 RTK 수준
- 연속성 평가
- Fix Quality 지속성
- 위성 수 안정성 (8개 이상 권장)
- 신호 끊김 빈도
좌표 변환의 중요성
- 지역성 직관성: 미터 단위 상대 거리로 직관적 이해
- 계산 효율성: 평면 좌표계에세 빠른 거리/각도 계산
- 센서 통합: 차량 중심 좌표계에서 통합 처리
- 제어 시스템: 실시간 차량 제어에 최적화된 좌표계
