실습 목표
1. IMU 데이터 분석: 차량에 장착된 IMU 센서에서 수집한 데이터를 시각화하고 분석
2. 노이즈 필터링: 센서 데이터에 포함된 노이즈를 제거하기 위한 다양한 필터링 기법을 학습
3. Wheel Encoder 시뮬레이션: 펄스 데이터를 생성하고 이를 통해 차량 속도를 추정
다루는 차량 모션 센서 데이터
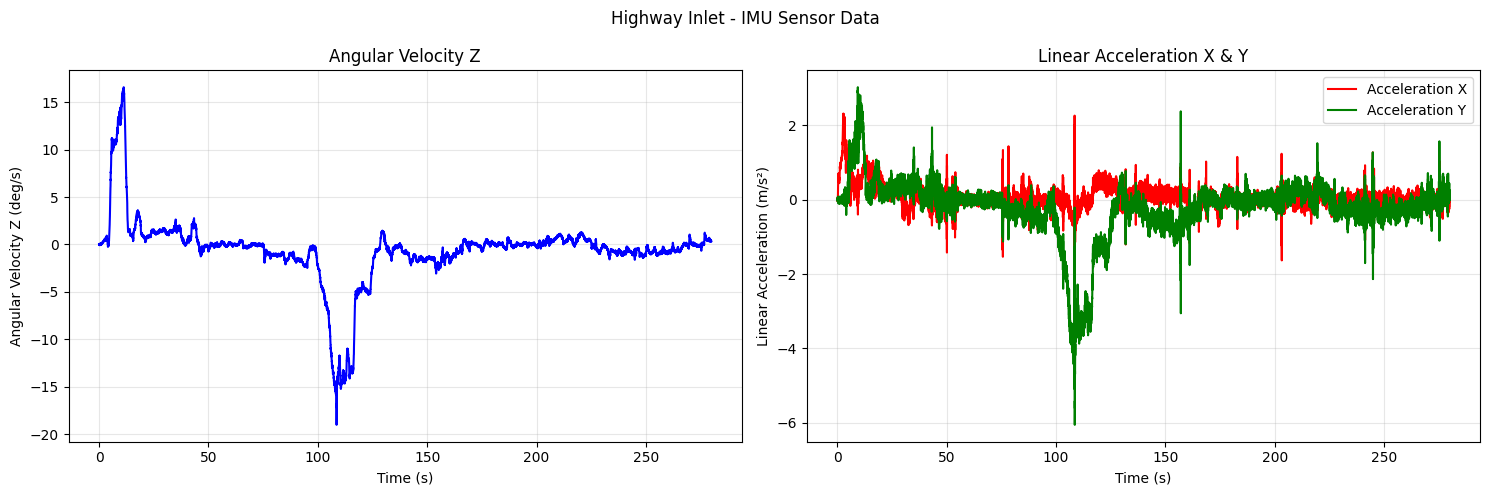
- IMU (Inertial Measurement Unit): 각속도와 선형가속도 측정
- Wheel Encoder: 휠 회전을 통한 속도 측정
차량 모션 센서 실습 필요성
- IMU 데이터 분석의 필요성
- 차량 동역학 이해: IMU 데이터를 통해 차량의 실제 움직임(회전, 가속)을 정확히 파악
- 안전 시스템: 급정거, 급회전 등 위험 상황 감지를 위한 기초 데이터
- 자율주행: 차량의 자세 추정 및 경로 계획에 필수적인 정보
- 노이즈 필터링의 중요성
- 센서 한계: 모든 센서는 노이즈를 포함하므로 신호 처리 필수
- 정확도 향상: 필터링 통해 실제 차량 움직임 더 정확하게 측정
- 시스템 안정성: 노이즈 인한 오작동 방지
- 휠 엔코더 활용
- 속도 측정: GPS보다 높은 주파수로 정확한 속도 정보 획득
- 실시간 제어: 차량 제어 시스템에서 즉각적인 피드백 제공
- 중복성: 다른 센서와 함께 사용하여 시스템 신뢰성 증대
실습 시나리오
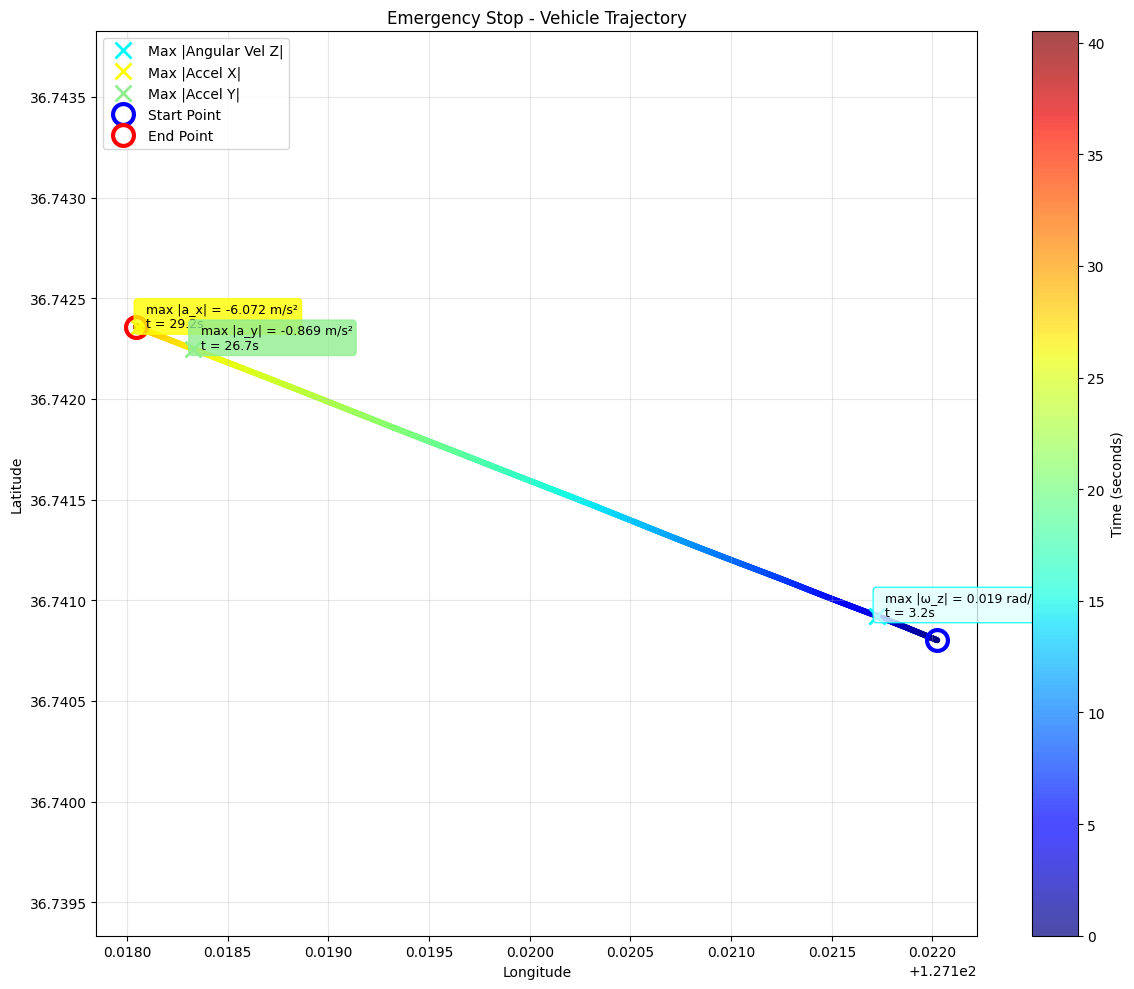
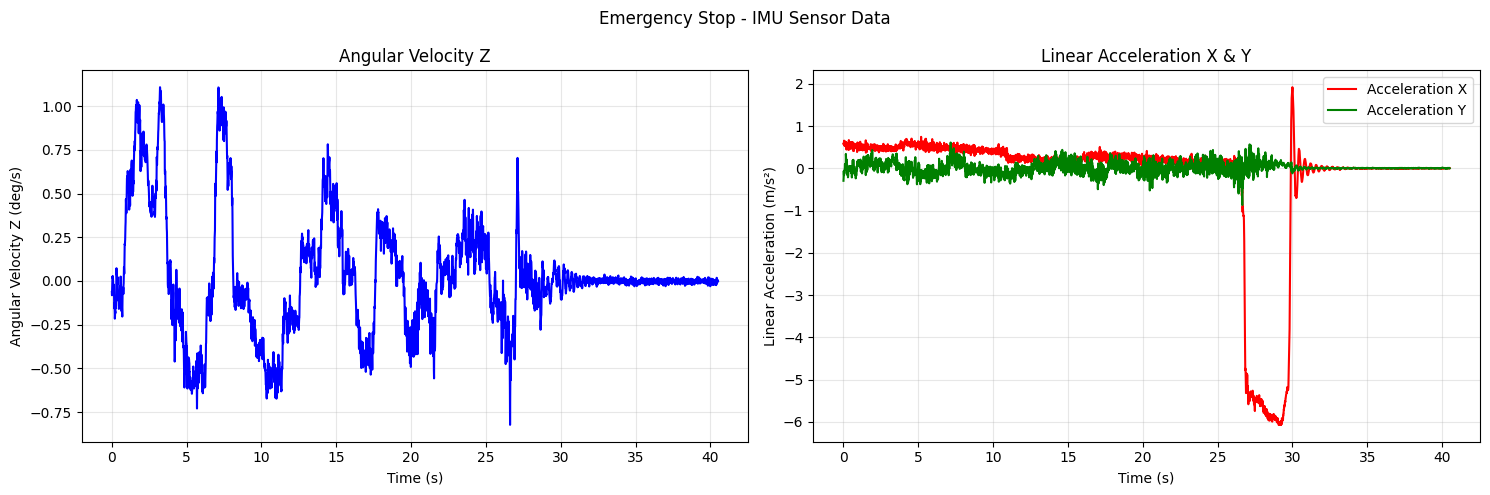
1. 급정거 시나리오: 브레잌이 시 발생하는 선형가속도 변화 관찰
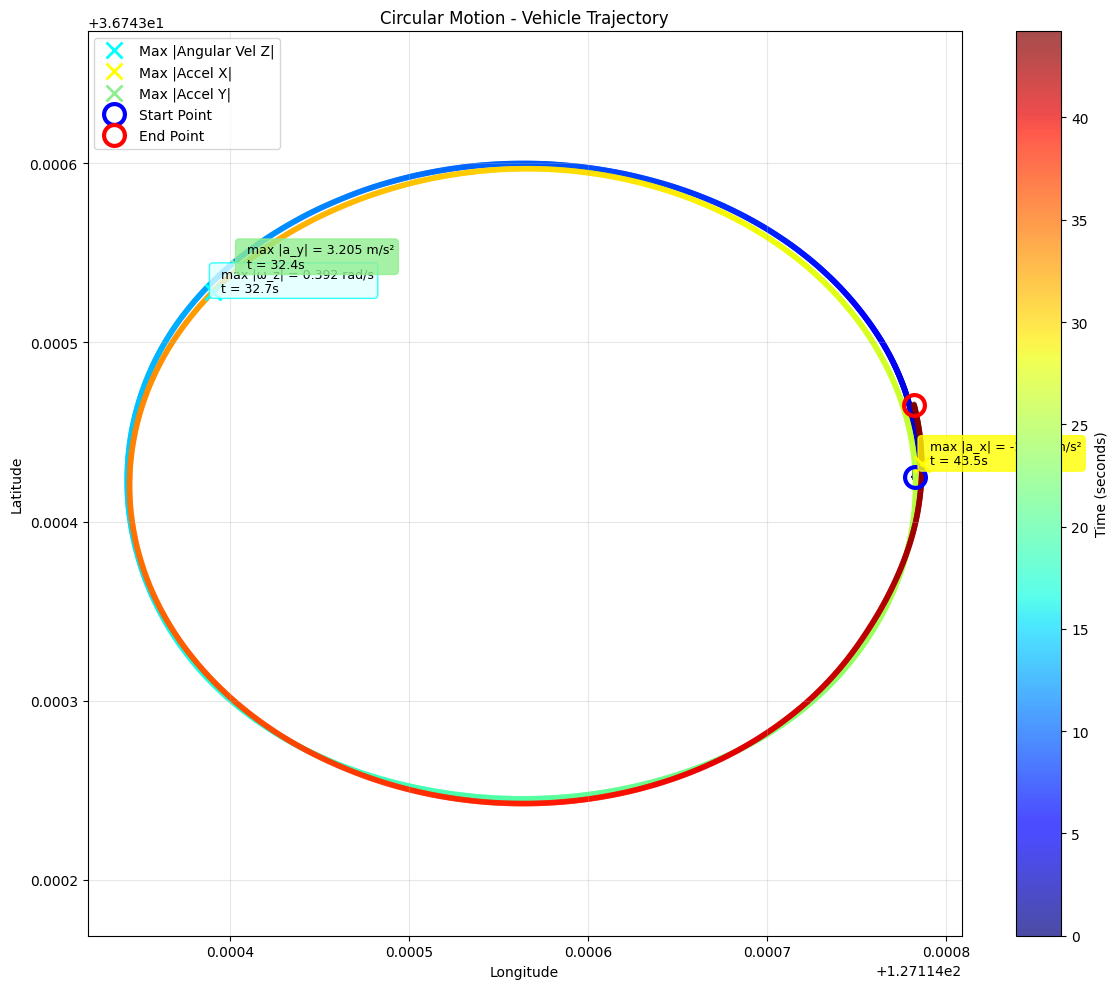
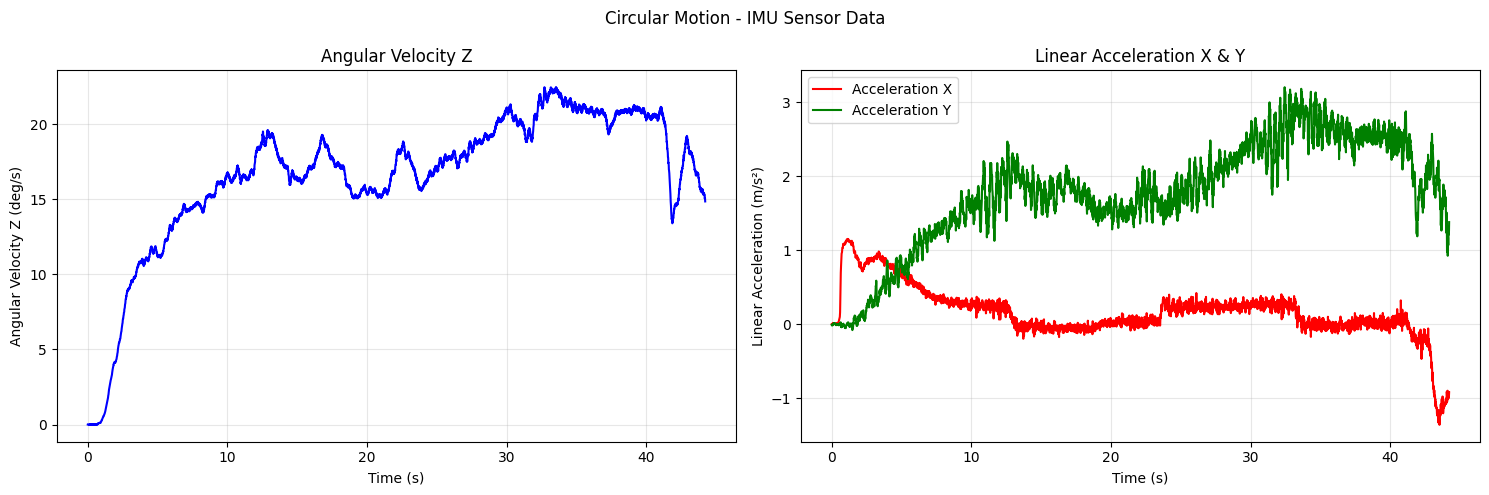
2. 원형 운동 시나리오: 회전 시 발생하는 각속도 변화 분석
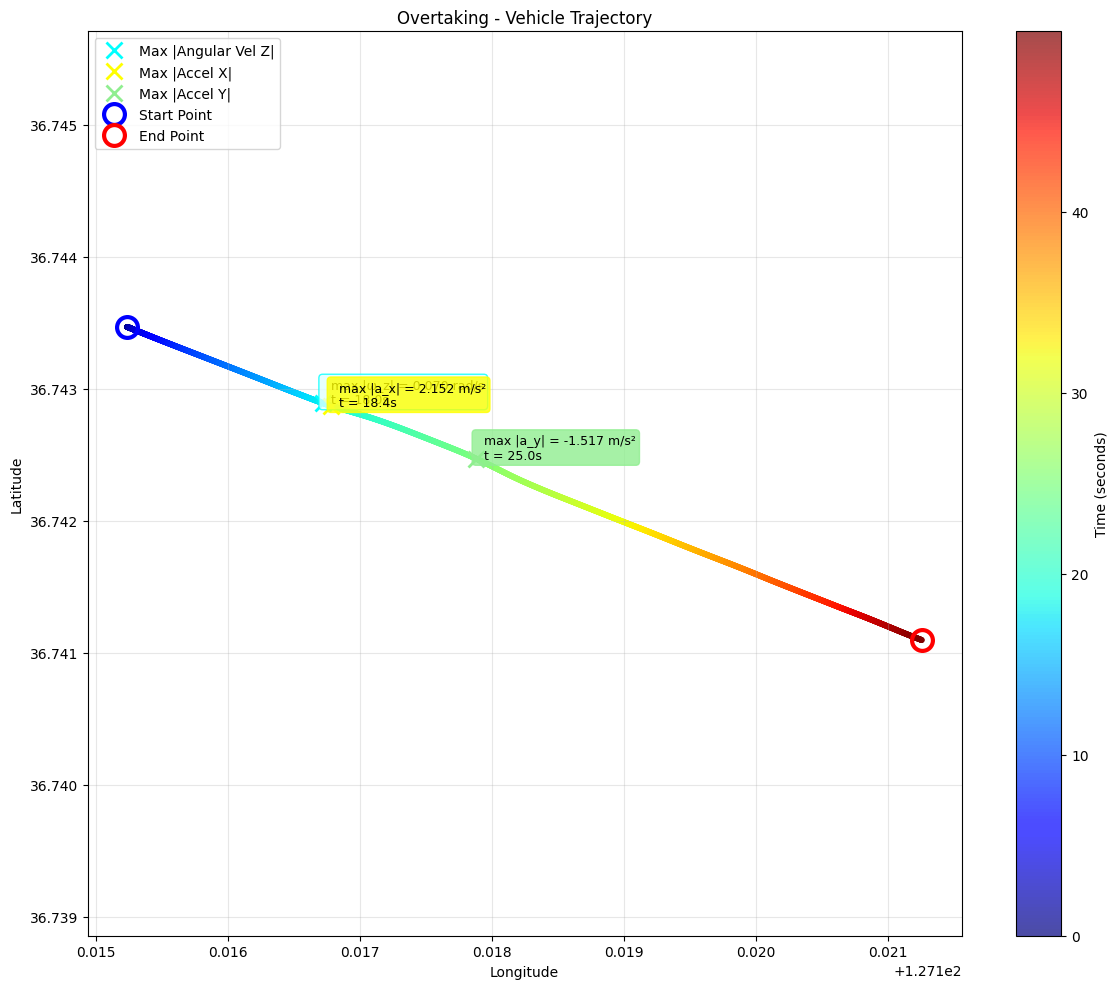
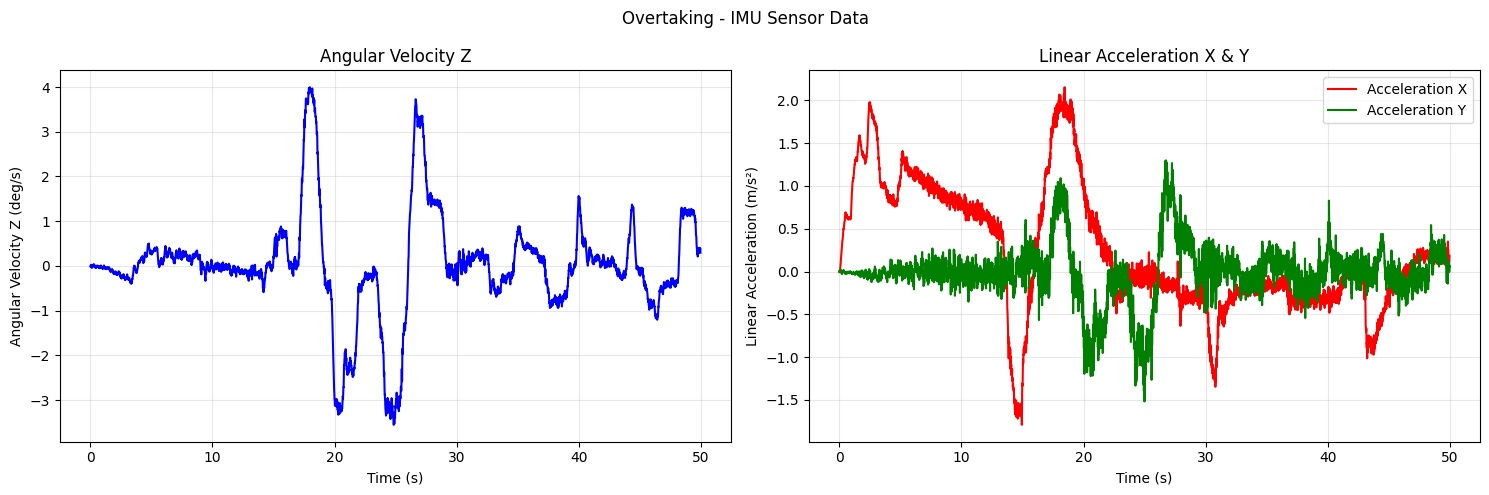
3. 추월 시나리오: 차선 변경 시 복합적인 움직임 패턴 분석
실습 요약 및 결론
- 차량 모션 센서 데이터 분석
- ROS bag 파일에서 IMU 데이터 로딩
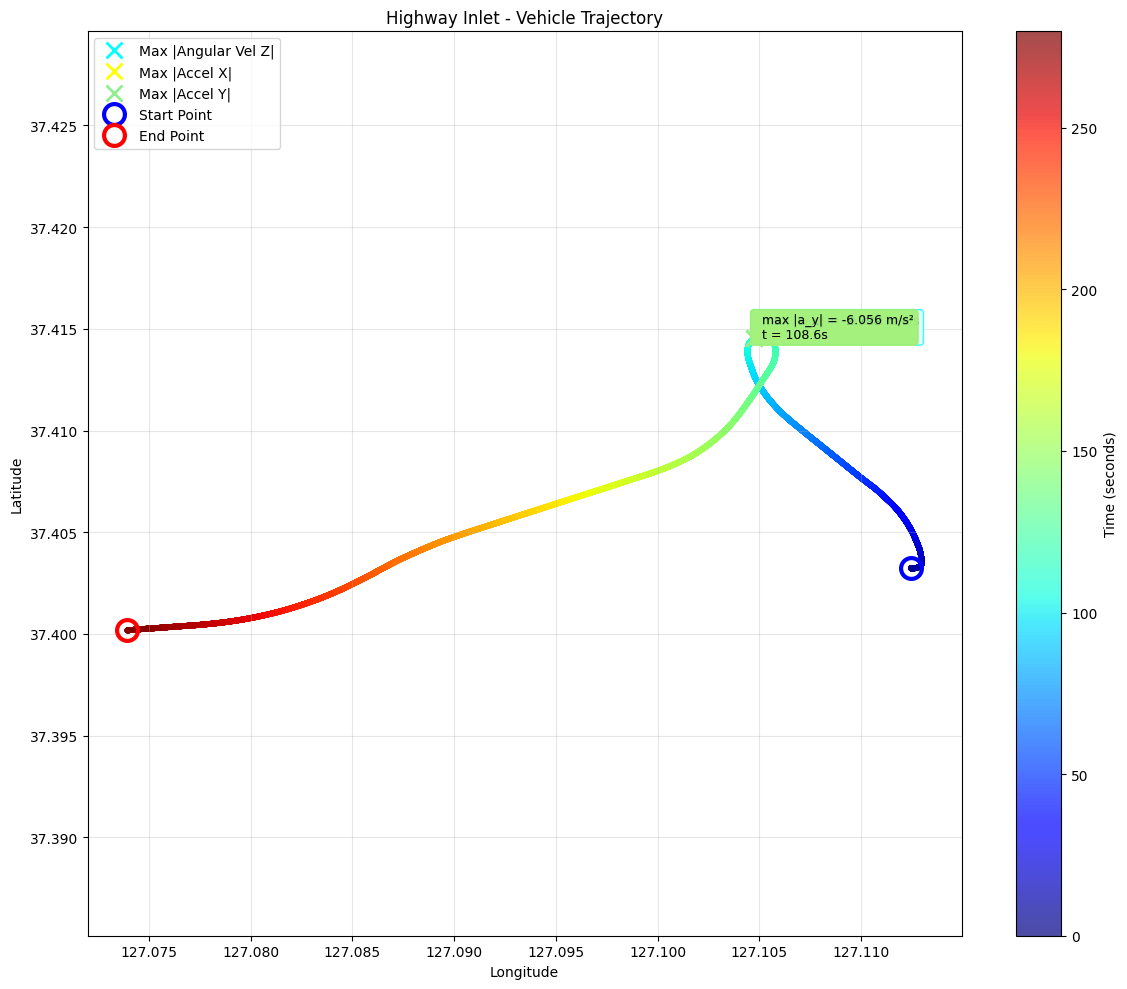
- 차량 궤적과 함께 시간에 따른 각속도 및 선형 가속도 변화 관찰
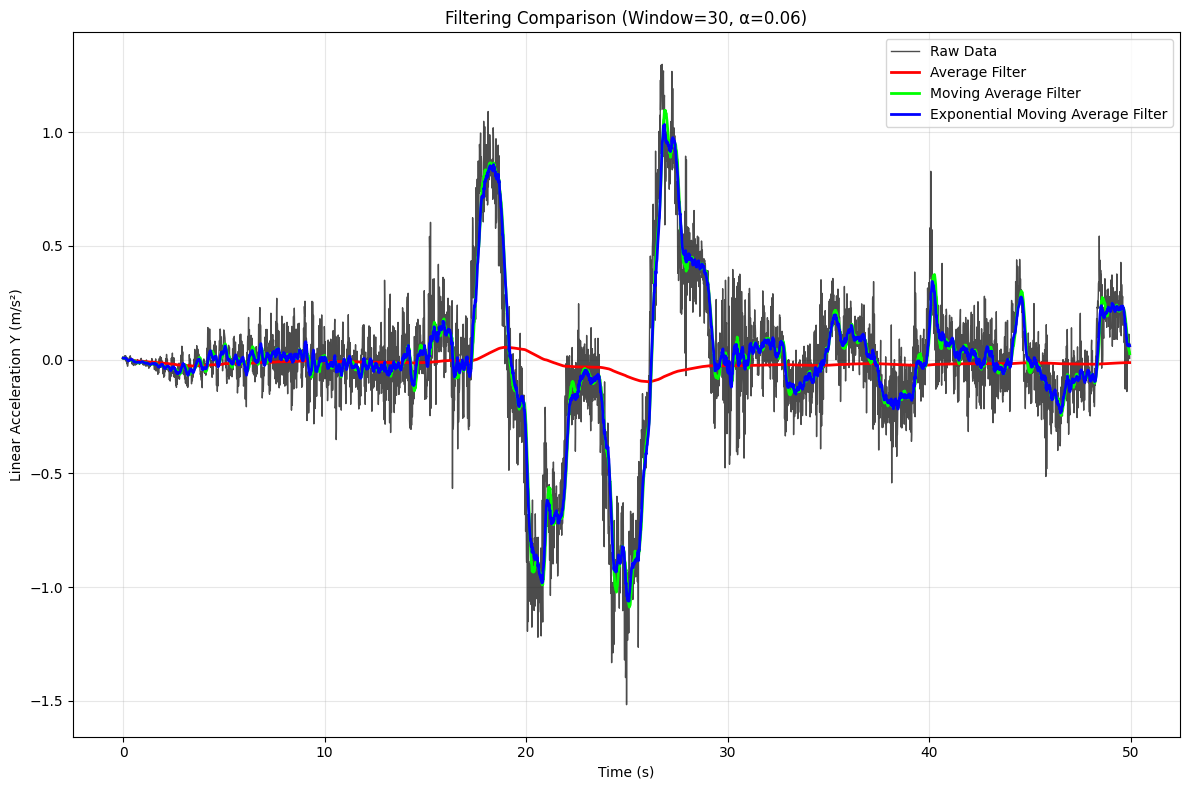
- 노이즈 필터링 기법
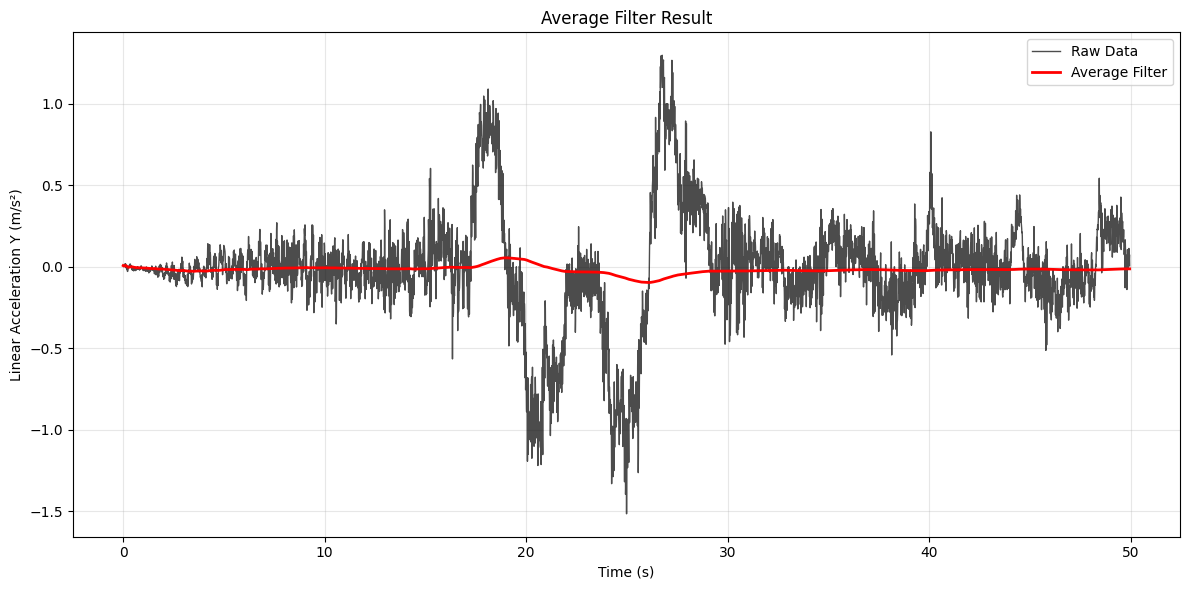
- Average Filter: 단순하지만 시간 정보 손실
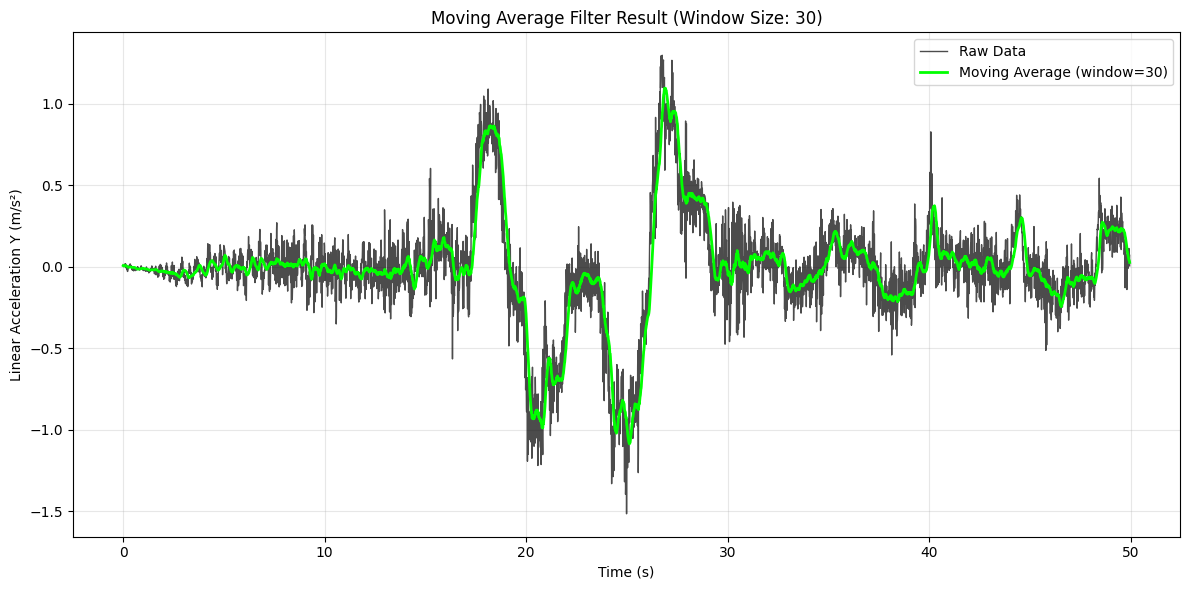
- Moving Average Filter: 지역적 특성 보존, 윈도우 크기 조정 가능
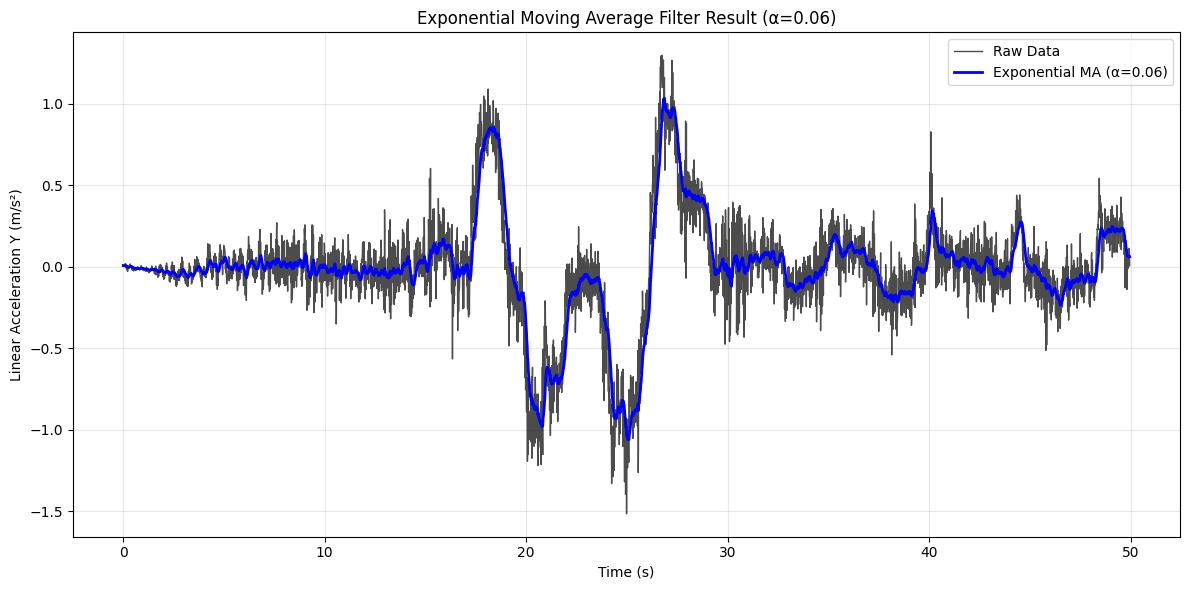
- Exponential Moving Average: 실시간 처리 적합, α 값으로 반응성 조절
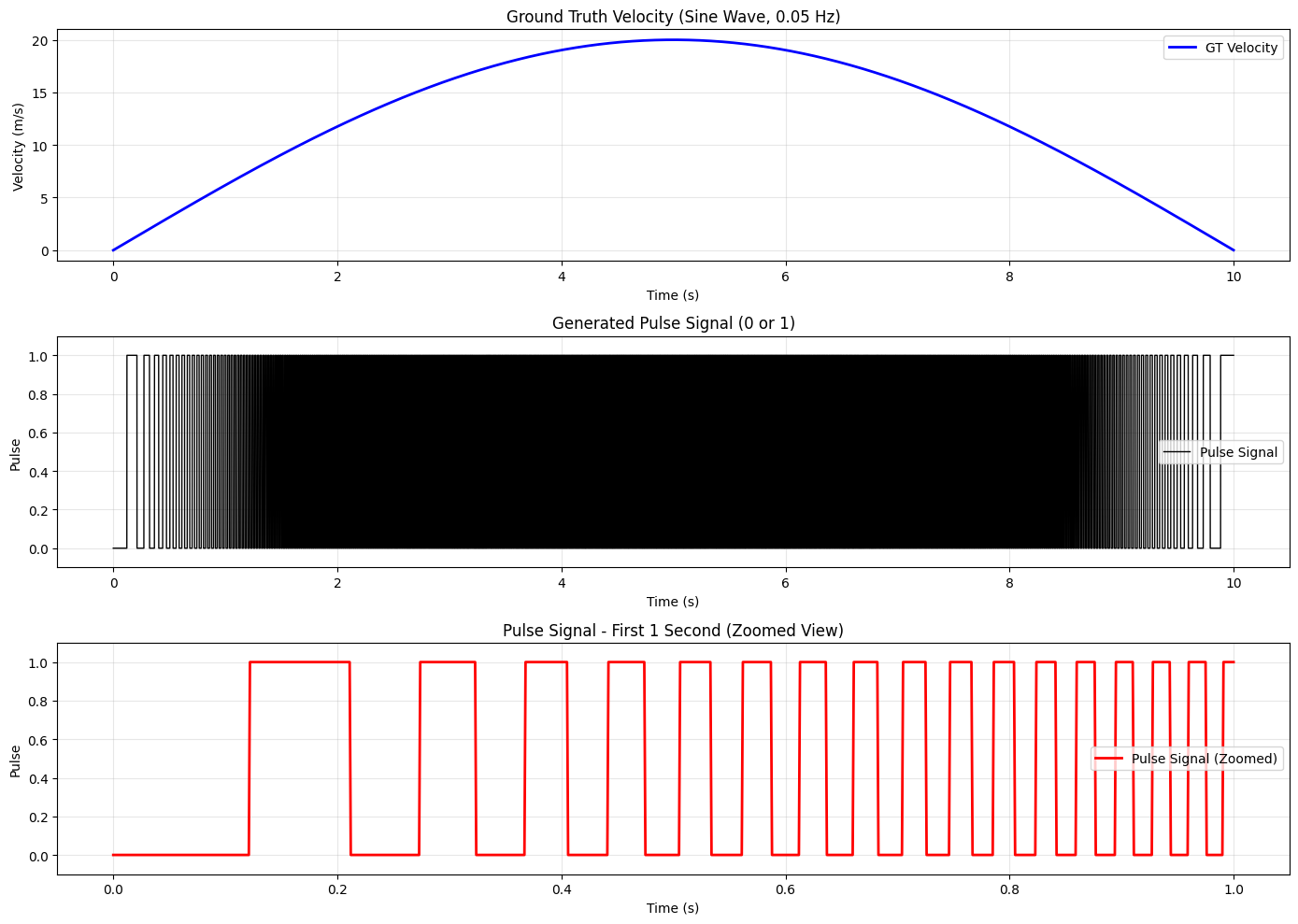
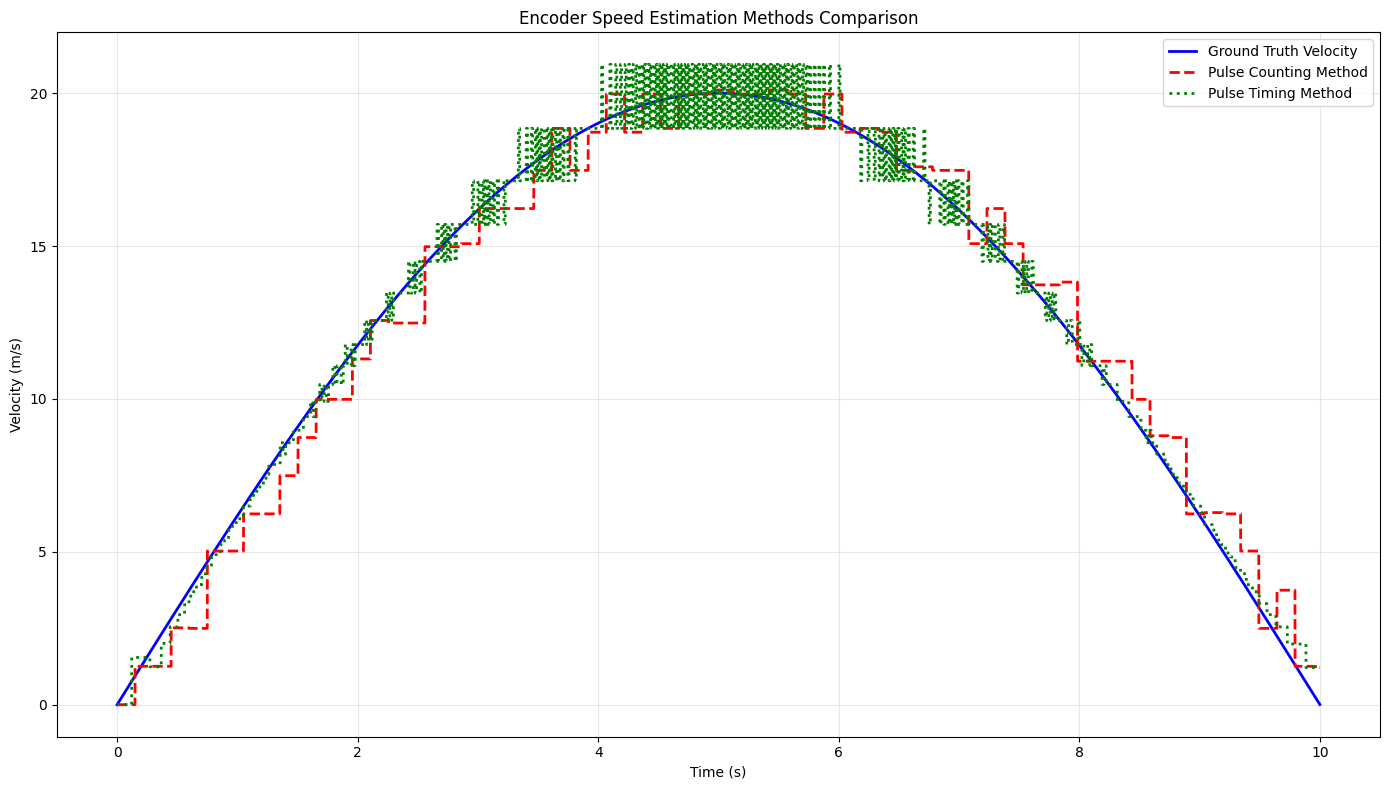
- 휠 엔코더 시뮬레이션
- 정밀한 펄스 데이터 생성(디지털 신호)
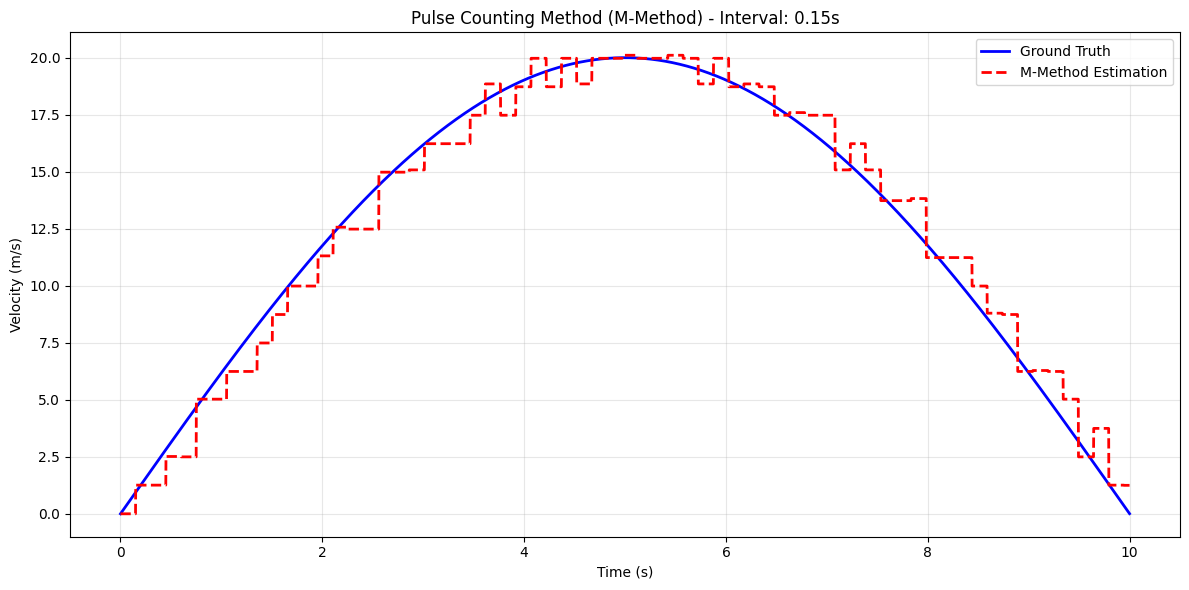
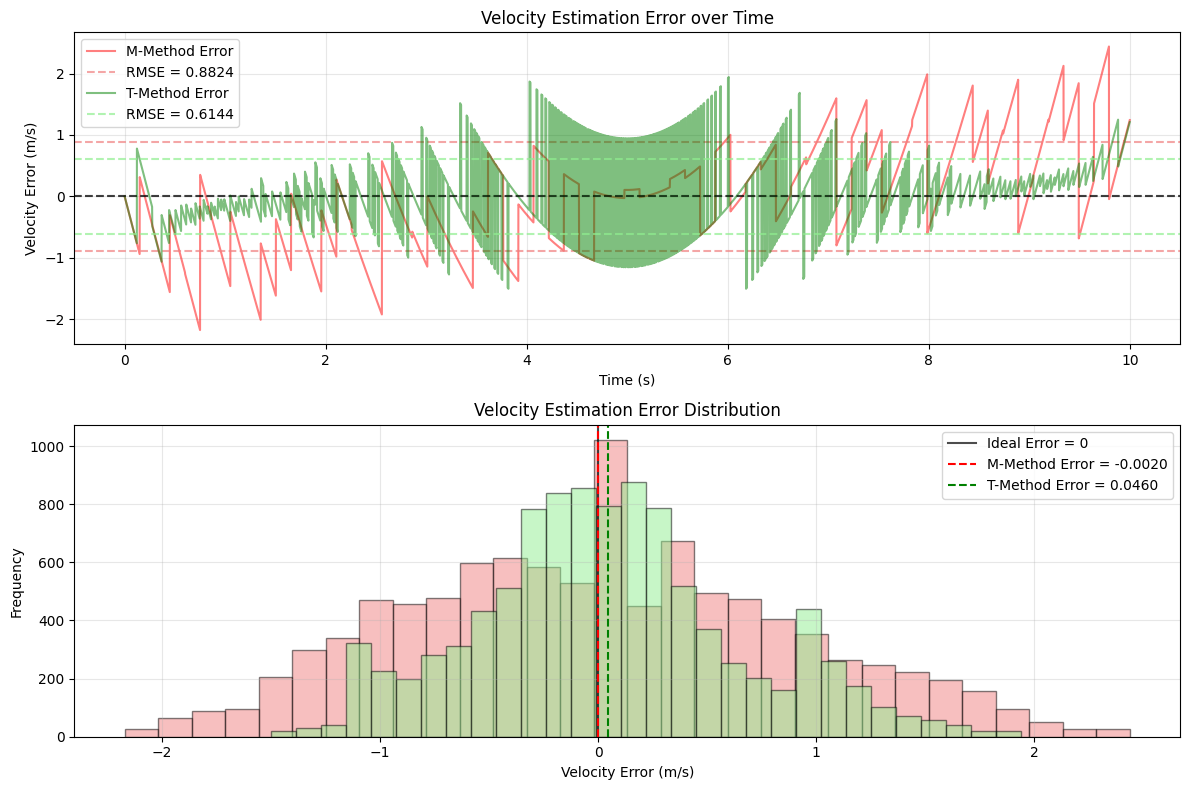
- M-Method (Pulse Counting): 펄스 개수 기반 속도 추정
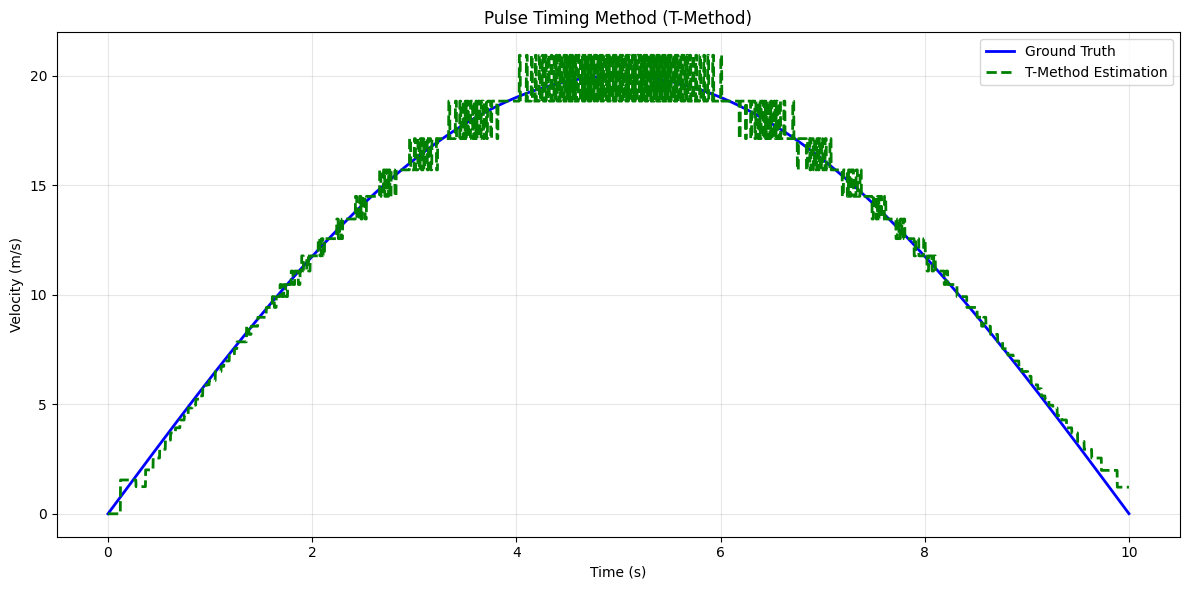
- T-Method (Pulse Timing): 펄스 간격 기반 속도 추정
- 두 방법의 특성 및 성능 비교 (RMSE, 평균, histogram)
