실습 목표
1. 차량 동역학 모델 구현: 종방향 dynamic 모델과 횡방향 kinematic/dynamic 모델 구현
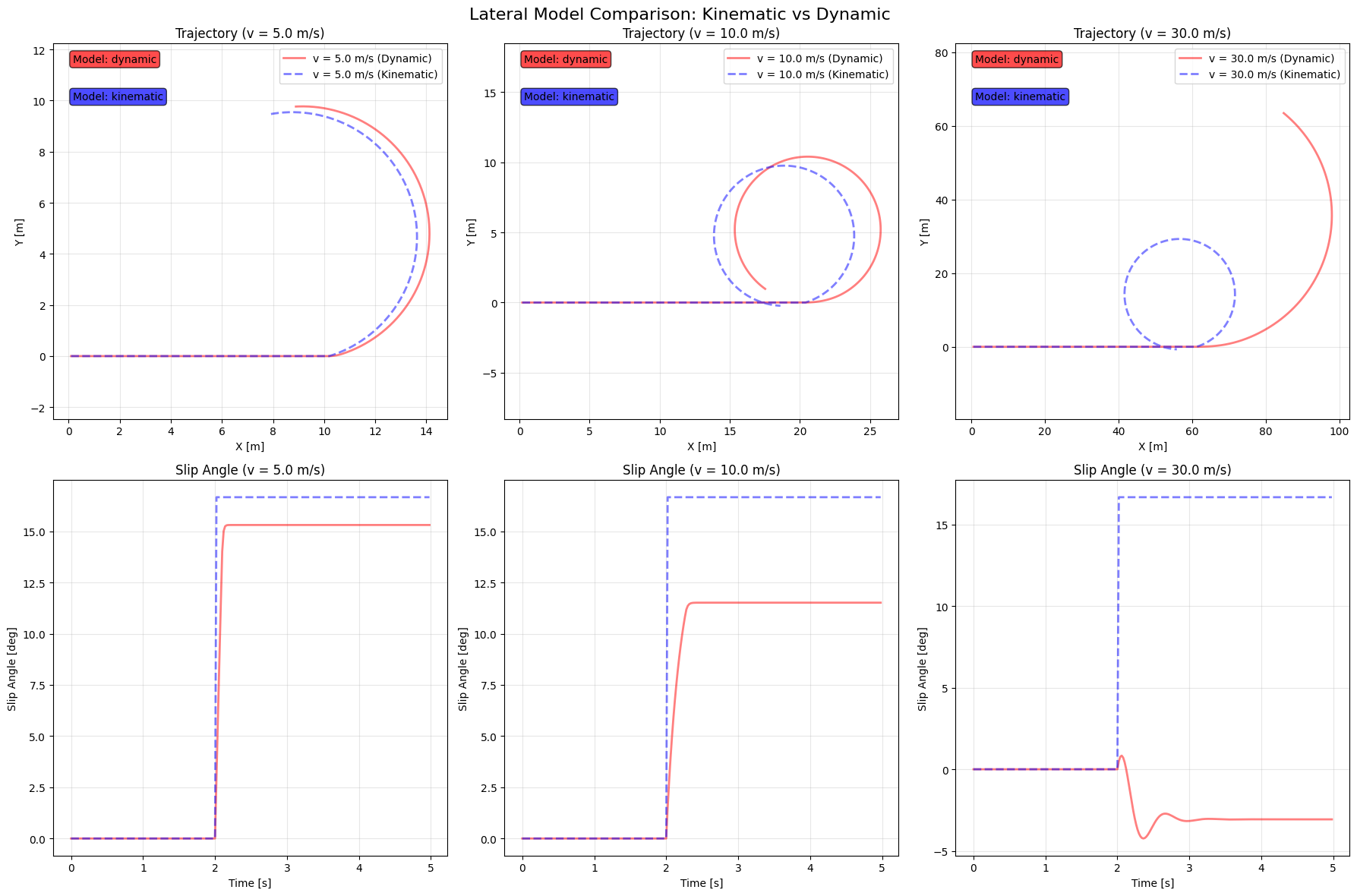
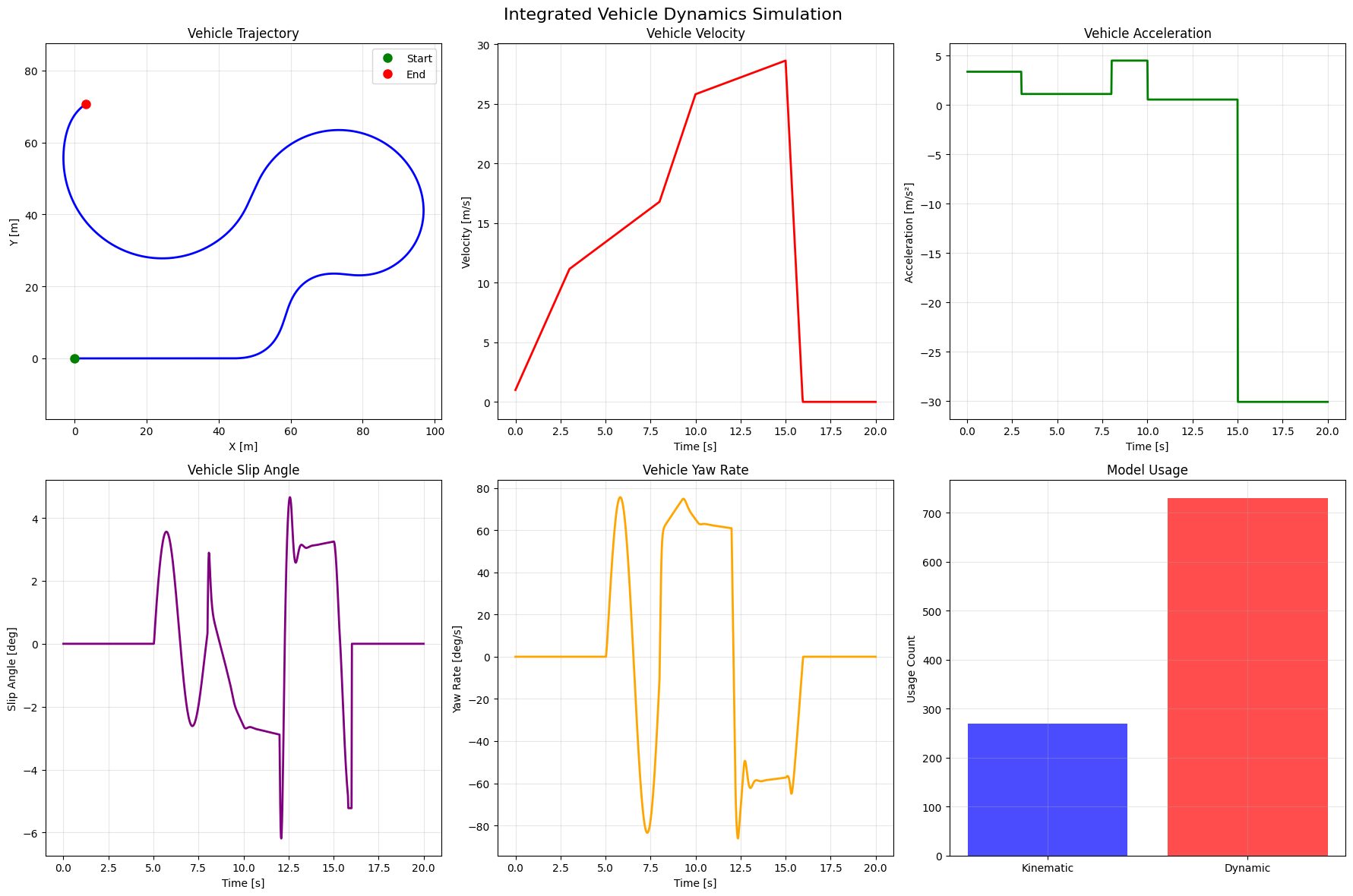
2. 속도 기반 모델 스위칭: 속도에 따른 횡방향 모델 자동 전환 (kinematic <-> dynamic)
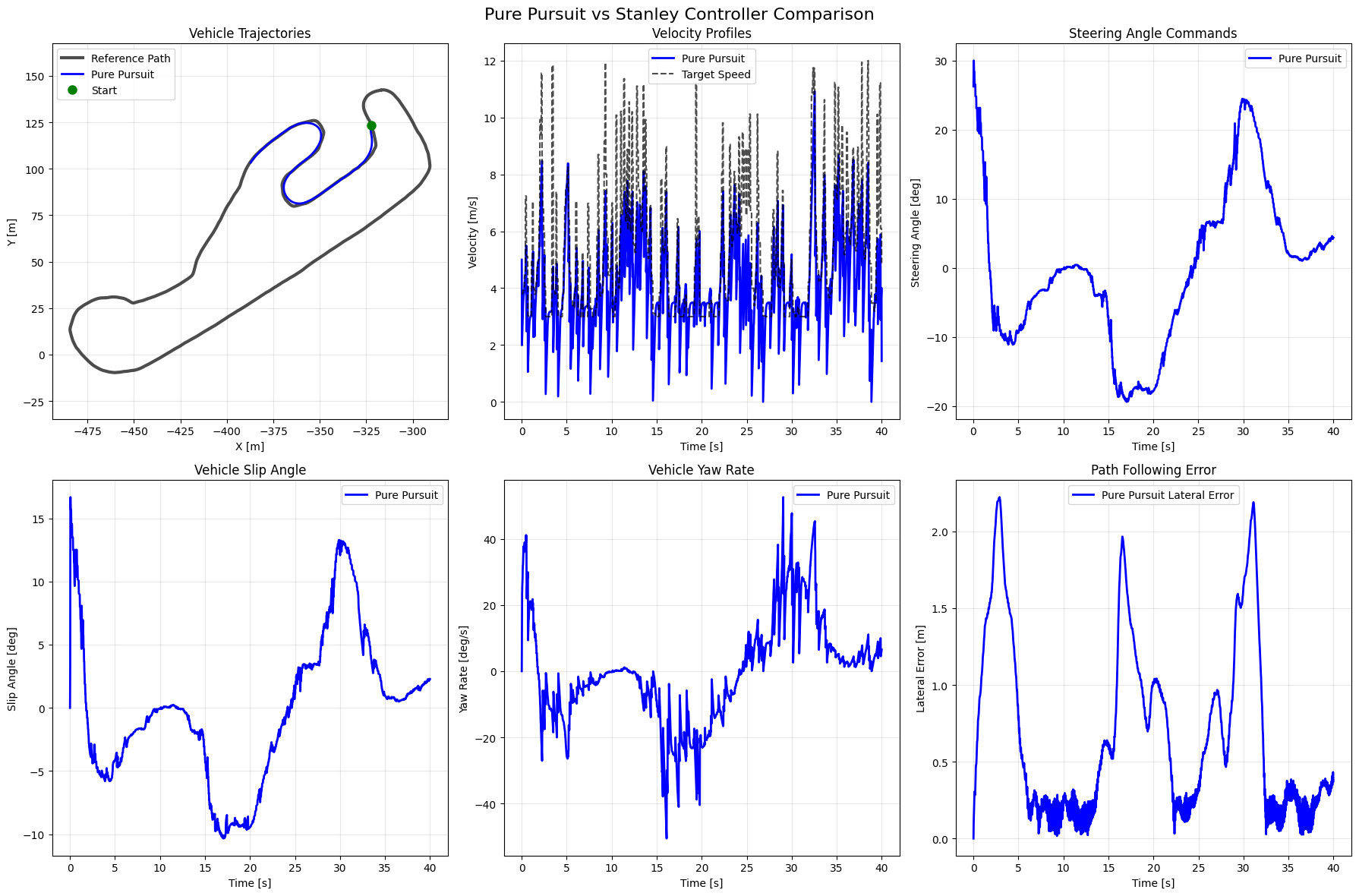
3. 종횡방향 제어 알고리즘: Pure Pursuit, Stanley 제어 및 PID 속도 제어 구현
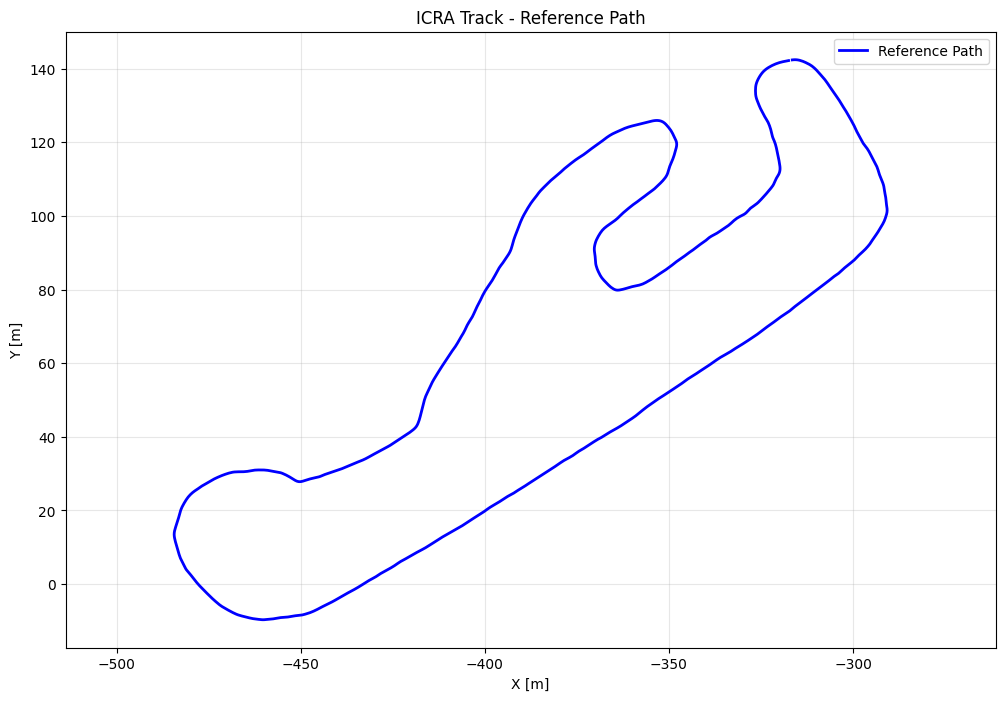
4. 경로 추종 시뮬레이션: 통합 제어 시스템 통한 실시간 경로 추종
다루는 차량 동역학 모델
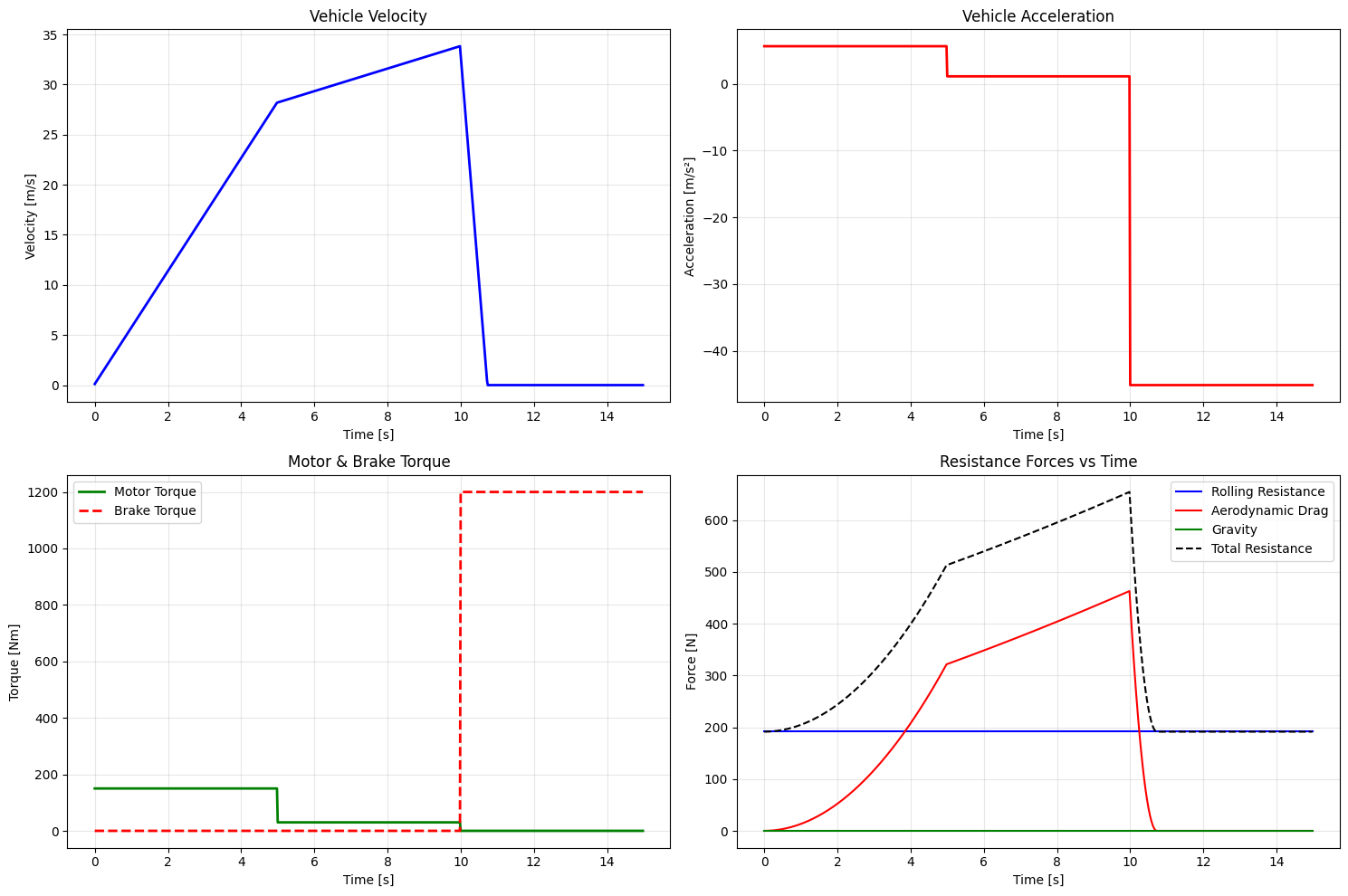
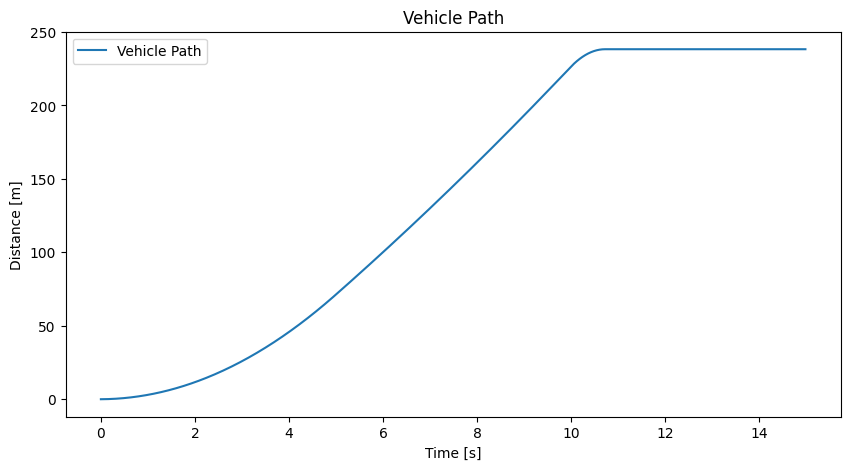
- 종방향 Dynamic Model: 모터 토크, 공기저항, 구름저항 고려
- 횡방향 Kinematic Model: 저속 주행 시 (v < 5m/s)
- 횡방향 Dynamic Model: 고속 주행 시 (v >= 5m/s)
실습 구성
1. 차량 동역학 모델 개별 구현 및 검증
2. 속도별 횡방향 모델 비교 분석
3. 종횡방향 제어 알고리즘 구현
4. 통합 경로 추종 시뮬레이션