실습 목표
1. EKF 이론 이해: 선형 칼만 필터와 EKF의 차이점 및 야코비안 행렬 개념
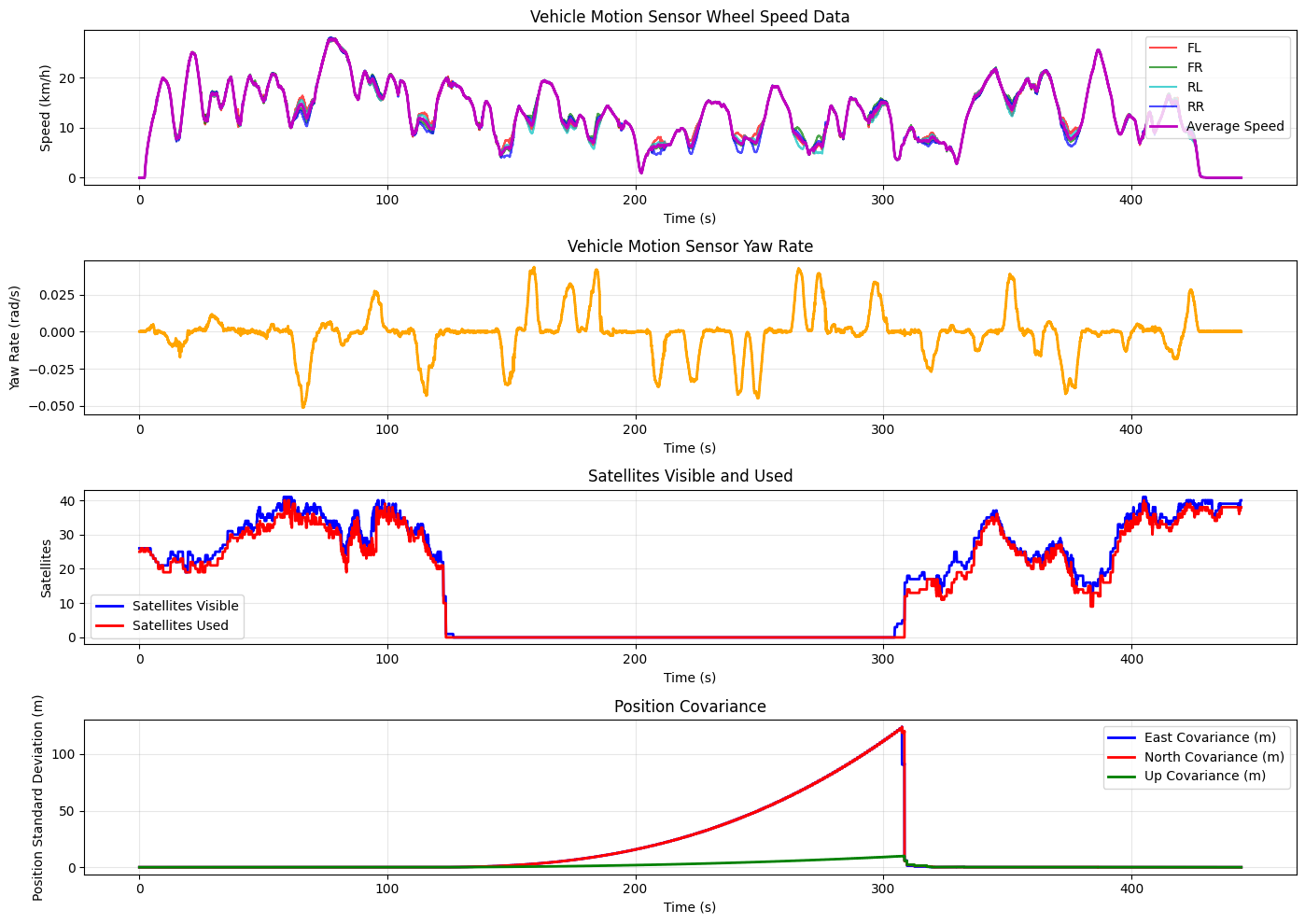
2. Dead Recknoning 모델: IMU 데이터를 활용한 차량 운동 모델링
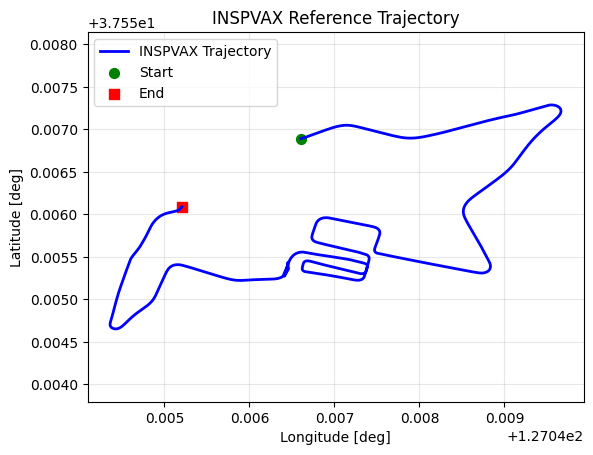
3. 센서 융합: GNSS와 IMU 데이터의 융합을 통한 정확한 위치 추정
4. 좌표계 변환: WGS94(위경도) <-> ENU(동-북-상) 좌표계 변환
5. 실시간 위치 추정: 연속적인 센서 데이터 처리 및 위치 업데이트
6. 결과 시각화: 애니메이션 및 위성 지도를 통한 추정 결과 분석
EKF vs 선형 칼만 필터
주요 차이점
- 선형 KF: 선형 시스템 모델
- EKF: 비선형 시스템 모델
EKF의 필요성
차량의 운동은 비선형 특성을 가짐
- 차량의 요각(yaw)에 따라 속도 벡터 방향 변함