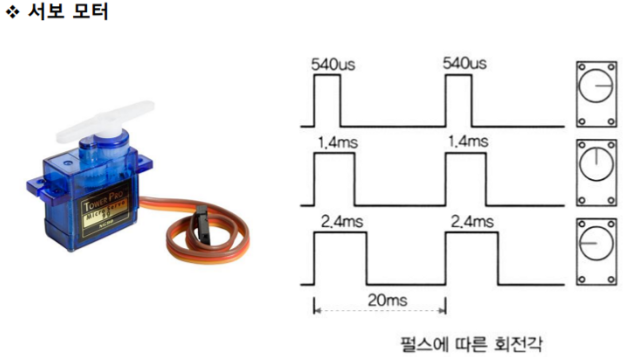
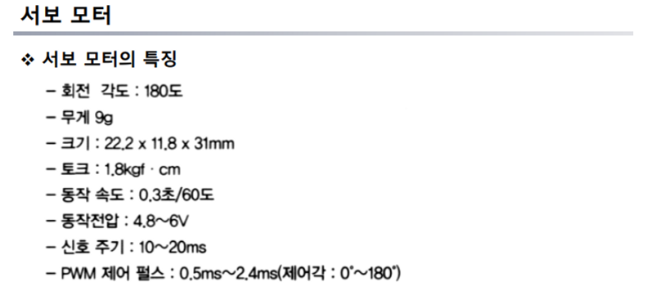
- 서보모터: 모터 샤프트의 각도 위치, 회전속도 및 가속도를 조절할 수 있는 전자 모터
1. 서보 모터 회전시키기(라이브러리 이용)
#include <Servo.h>
#include <MiniCom.h>
MiniCom com;
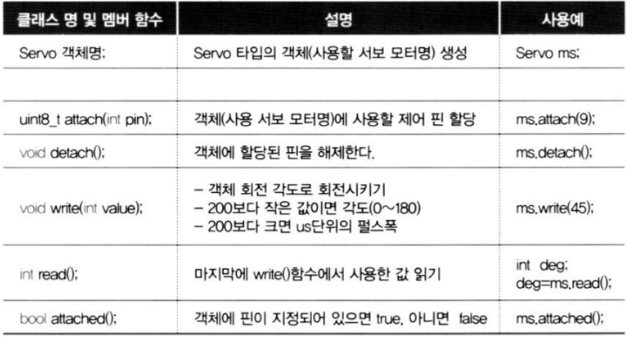
Servo myServo; // 사용할 서보 모터명 선언
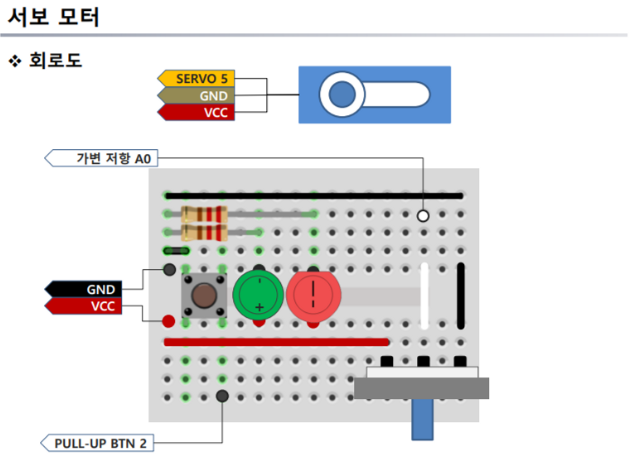
const int servo_pin = 5;
void setup(){
com.init();
com.print(0, "Servo Test");
myServo.attach(servo_pin); // 사용할 서보명에 핀 할당
}
void move_angle(int angle, int delay_time){
myServo.write(angle);
com.print(1, "Angle:", angle);
delay(delay_time);
}
void loop(){
move_angle(0, 1000);
move_angle(90, 1000);
move_angle(180, 1000);
mobe_angle(90, 1000);
}2. 가변저항에 맞춰 서보모터 회전시키기
#include <Analog.h>
#include <Servo.h>
Analog a_value(A0, 180, 0);
Servo myServo;
const int servo_pin(5);
void setup(){
myServo.attach(servo_pin);
}
void loop(){
int angle = a_value.read();
myServo.write(angle);
delay(100);
}3. 가변저항에 맞춰 서브 모터 회전시키기, Minicom 연동
#include <Analog.h>
#include <Servo.h>
#include <MiniCom.h>
MiniCom com;
Analog a_value(A0, 180, 0);
Servo myServo;
const int servo_pin = 5;
void check() {
int angle = a_value.read();
myServo.write(angle);
com.print(1, "Angle:", angle);
}
void setup() {
com.init();
com.print(0, "Servo Test2");
myServo.attach(servo_pin);
com.setInterval(100, check);
}
void loop() {
com.run();
}
좋은 지식 나누어요