Geometric object that has both a magnitude and direction x∈Rn, x=⎝⎜⎜⎜⎛x1x2...xn⎠⎟⎟⎟⎞=(x1,x2,...,xn)⊤
Magnitude of vector ∣∣x∣∣=x12+x22+...+xn2
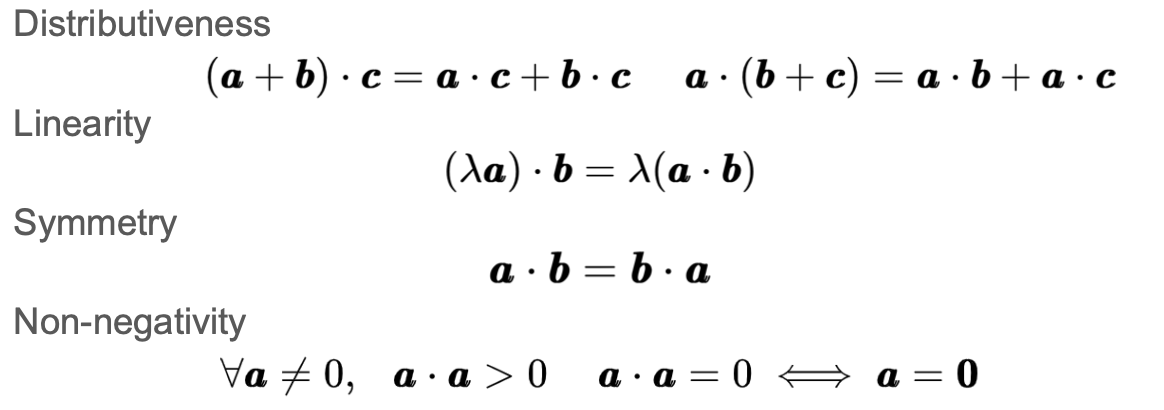
Dot Product
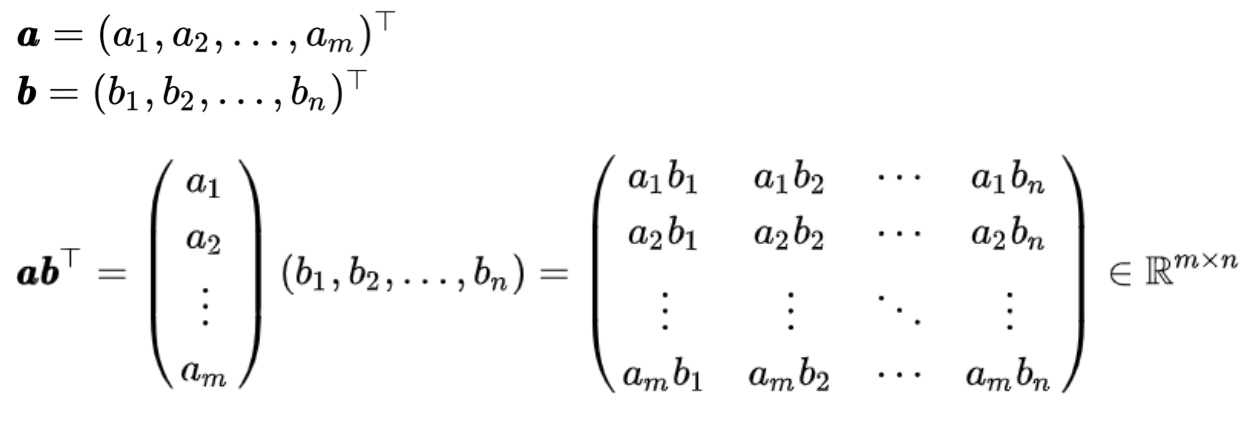
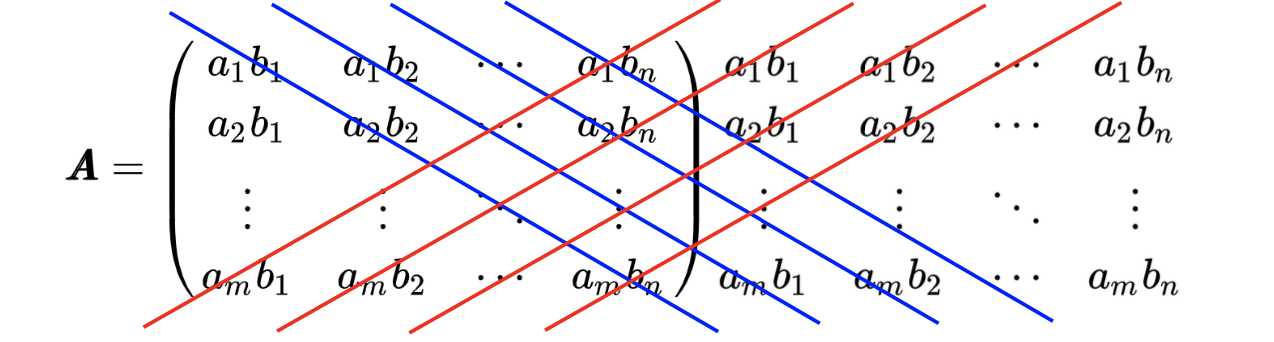
Outer Product
Norm
p-norm : ∣∣x∣∣=(∑i=1n∣xi∣p)p1
1-2. Basis
Linear Dependency
Given a set of vectors X={x1,x2,...xn} xi∈X is linearly dependent if it can be written as a linear combination of X−{xi}
Basis
A basis is an lineraly independent set of vectors that spans the "whole space"
Standard Basis
Othogonal ei⊤ej=0, Normalized ei⊤ei=1 → Orthonormal
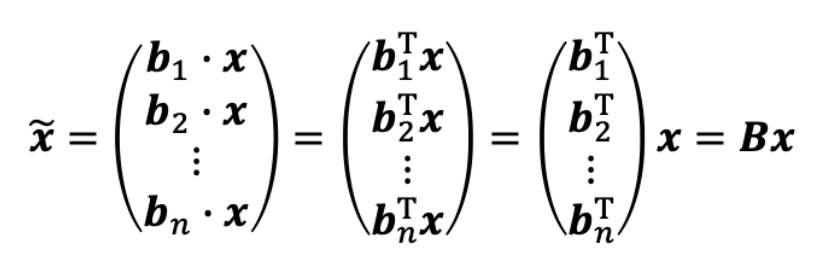
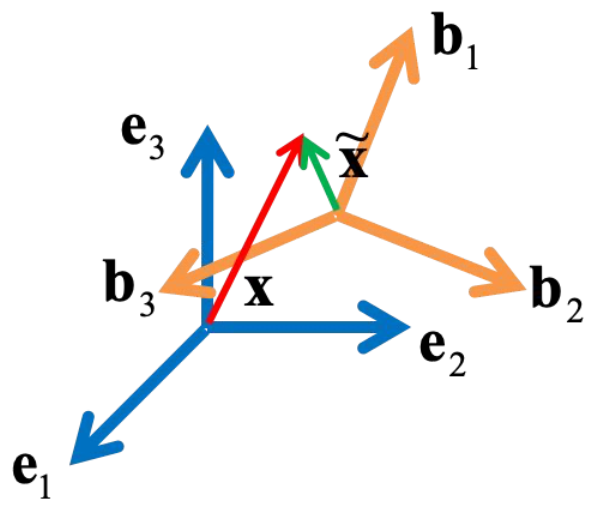
Change of Basis B={b1,b2,...,bn},bi=Rm : basis
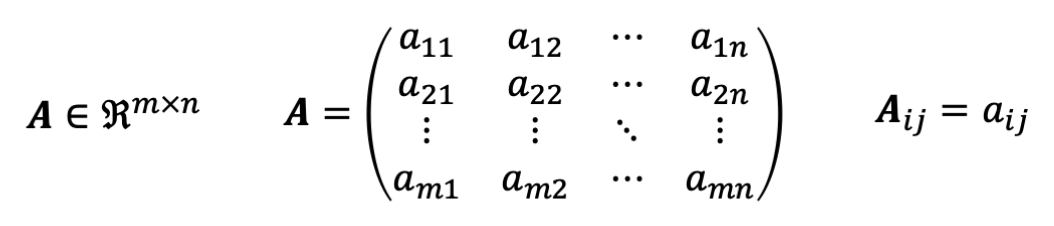
1-3. Matrix
Rectangular (2D) array of numbers
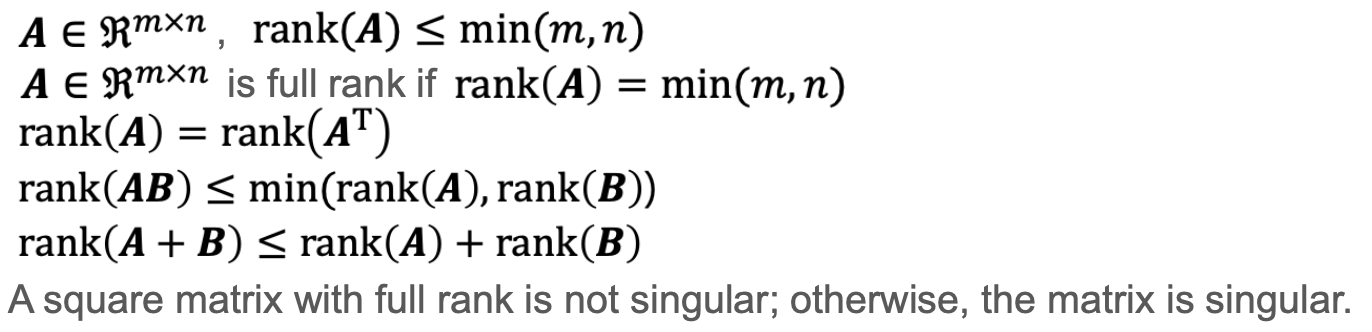
Rank of Matrix
The number of linearly independent rows or columns in matrix
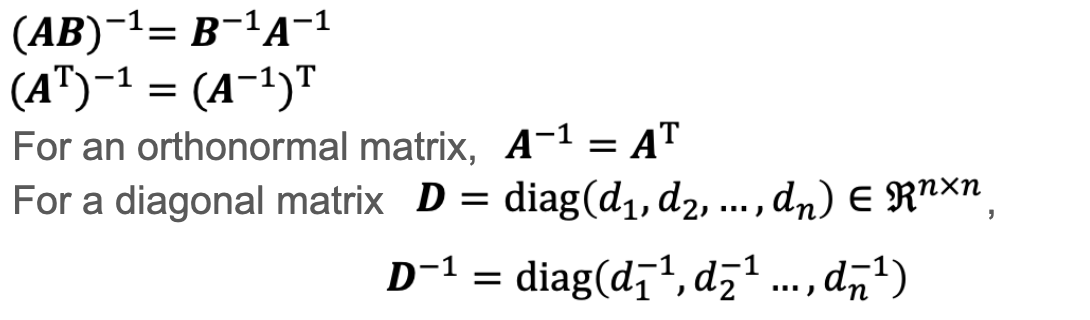
Matrix Inversion
To have inversion matrix, the matrix should be square and non-singular.
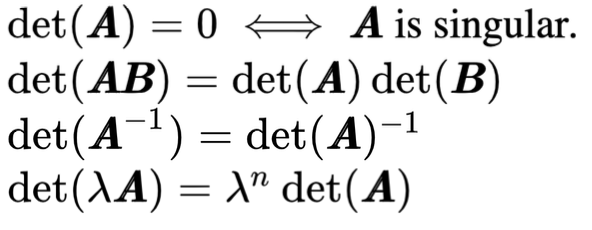
Determinant
1-4. Solving Linear Equations
Ax=b
A:m×n,x:m×1,b:n×1
Finding the exact solution (m = n) x=A−1b
Finding the least square solution (m>n) x=(A⊤A)−1(A⊤b)
When A's independent row is smaller than n, m gets smaller than n in fact.
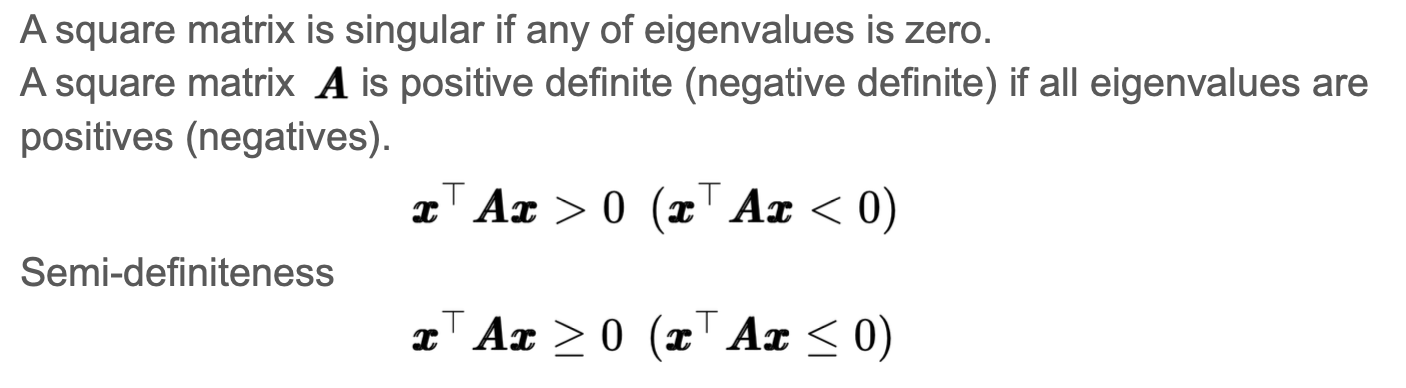
Eigen Vector & Eigen Value Ax=λx (square matrix A, eigen value λ, eigen vector x)
A를 x방향으로 projection하면 λ만큼의 magnitude를 가진다.
Eigen Decomposition
Square and symmetric matrix A can be decomposed as A=VDV⊤
where V is orthonormal matrix of A's eigenvectors and D is a diagonal matrix of the associated eigenvalues.
2. Probability in Computer Vision
2-1. Definitions
Sample Space (Ω) : The set of all the outcomes
Event Space (E) : A set whose element is a subset of Sample space.
Random Variable : A function that assigns a number to each point in sample space.
2-2. Conditional Probability
Conditional Probability of A given B
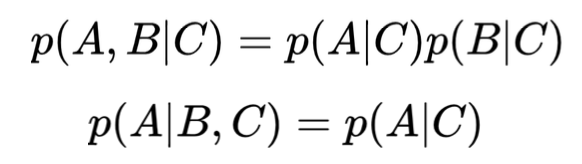
Independence
Conditional Independence
A and B are conditionally independent given C,
2-3. Chain Rule
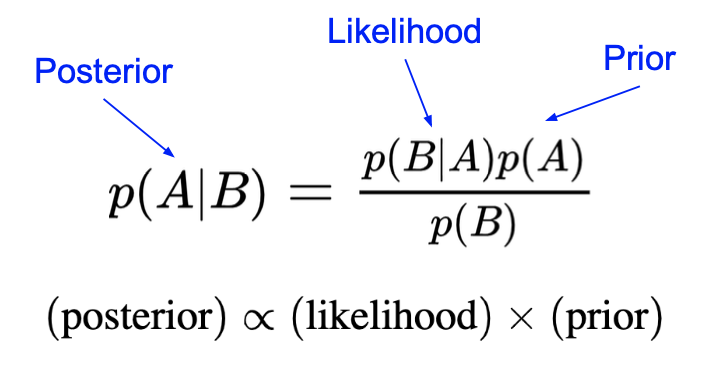
2-4. Bayes' Theorem
Posterior probability (사후확률) : 사건 B가 발생했을 때, 그 사건이 특정 모델 A에서 발생했을 확률
Likelihood : 어떤 모델 A에서 B가 관측될 확률
Prior : 어떤 모델이 가지고 있는 선험적 확률
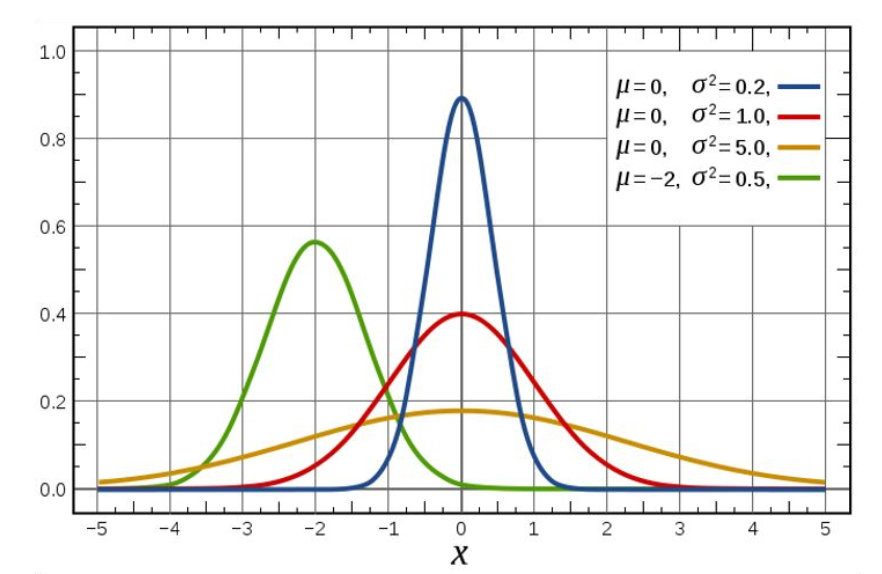
2-5. Gaussian Distribution
요약
1. Linear Algebra
Vector : operations, norm
Basis, linear dependency
Matrix : rank, inversion, determinant
Linear Equations : Least square solution, Eigen Decomposition