앞으로 계속 나오는 vπ(s,w)는 sample return을 의미한다
2.1) Policy evaluation을 위한 mse의 objective 이해하기
Mean Squared Value Error Objective
| MSVEO를 최소화하기 위한 weight μ를 찾자 |
|---|
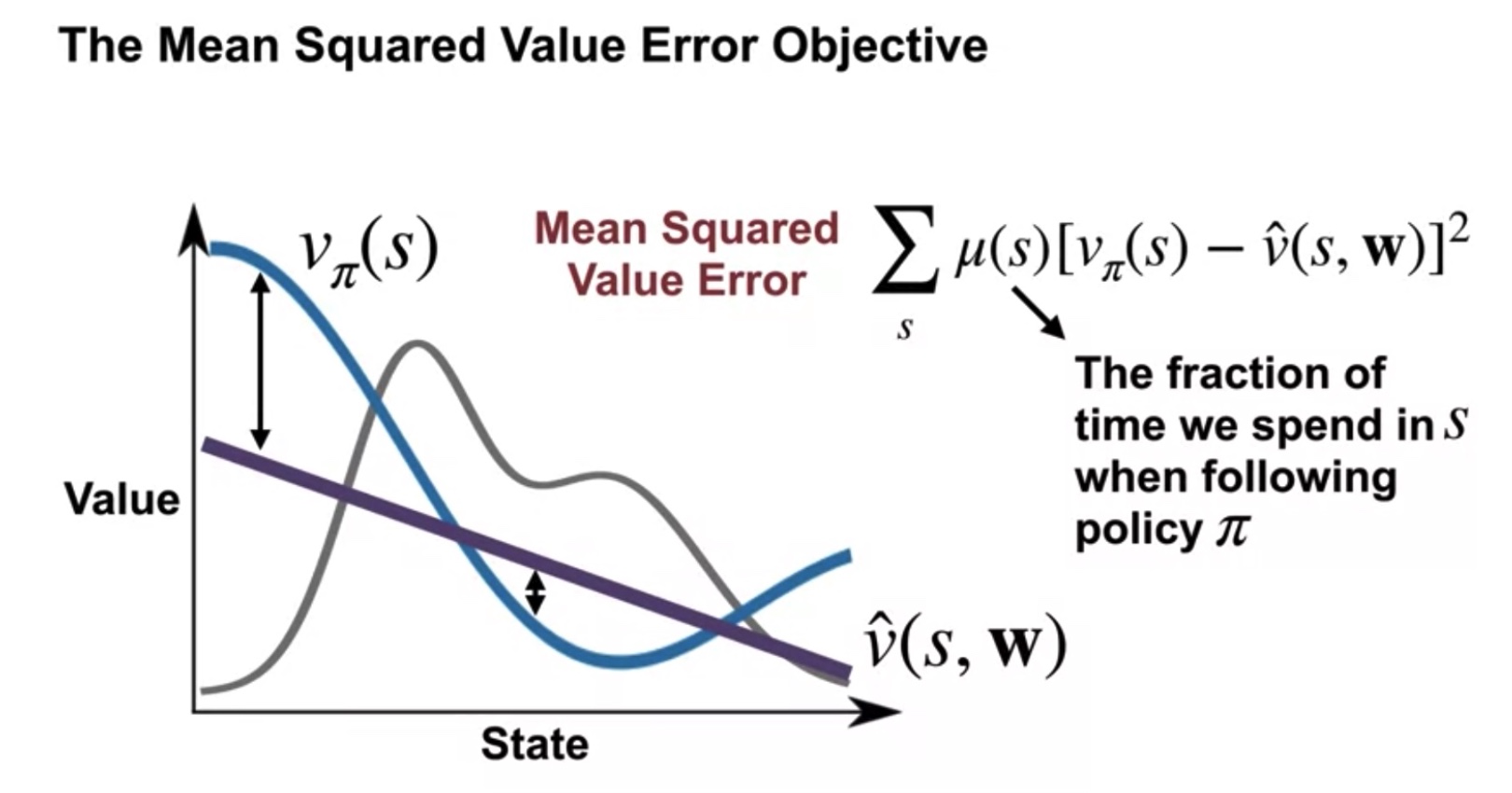 |
| Gray line is μ(s), weight |
미지수 항
- vπ(s) == True value function
- v^(s,w) == Estimated value function
- μ(s) == Fraction(weight) of time we spend in Si following policy π
공식
- Mean Squared Value Error VE=Σsμ(s)[vπ(s)−v^(s,w)]2
2.2) Gradient Monte for Policy evaluation
2.2.1. Gradient of the Mean Squared Value Error Objective
∇Σsμ(s)[vπ(s)−v^(s,w)]2
=Σsμ(s)∇[vπ(s)−v^(s,w)]2
=−Σsμ(s)2[vπ(s)−v^(s,w)]∇(v^(s,w))
저번 수업과의 차이점은...
- v^(s,w):= <w,x(s)> : linear gradient approxi function에서 기울기 함수
- ∇v^(s,w)=x(s) : value function의 기울기 함수
2.2.2. Gradient Monte Carlo
MC에서는 중간의 추정값이 마지막까지 계산한 goal을 기준으로 갱신하기에
식을 다음과 같이 치환할 수 있다.
(α == step size)
- 치환 전 wt+1:=wt+α[vπ(St)−v^(St,wt))]∇v^(St,wt))
- 치환 후 wt+1:=wt+α[Gt−v^(St,wt))]∇v^(St,wt))
이 때 vπ(s):=Eπ[Gt∣St=s] 임을 고려하여
expectation gradient는 다음과 같이 치환할 수 있다.
- Eπ[2[vπ(St)−v^(St,w)]∇v^(St,w)]
- = Eπ[2[Gt−v^(St,w)]∇v^(St,w)]
여기까지 MC에 Stochastic Gradient Descent을 적용하는 법을 보였다.
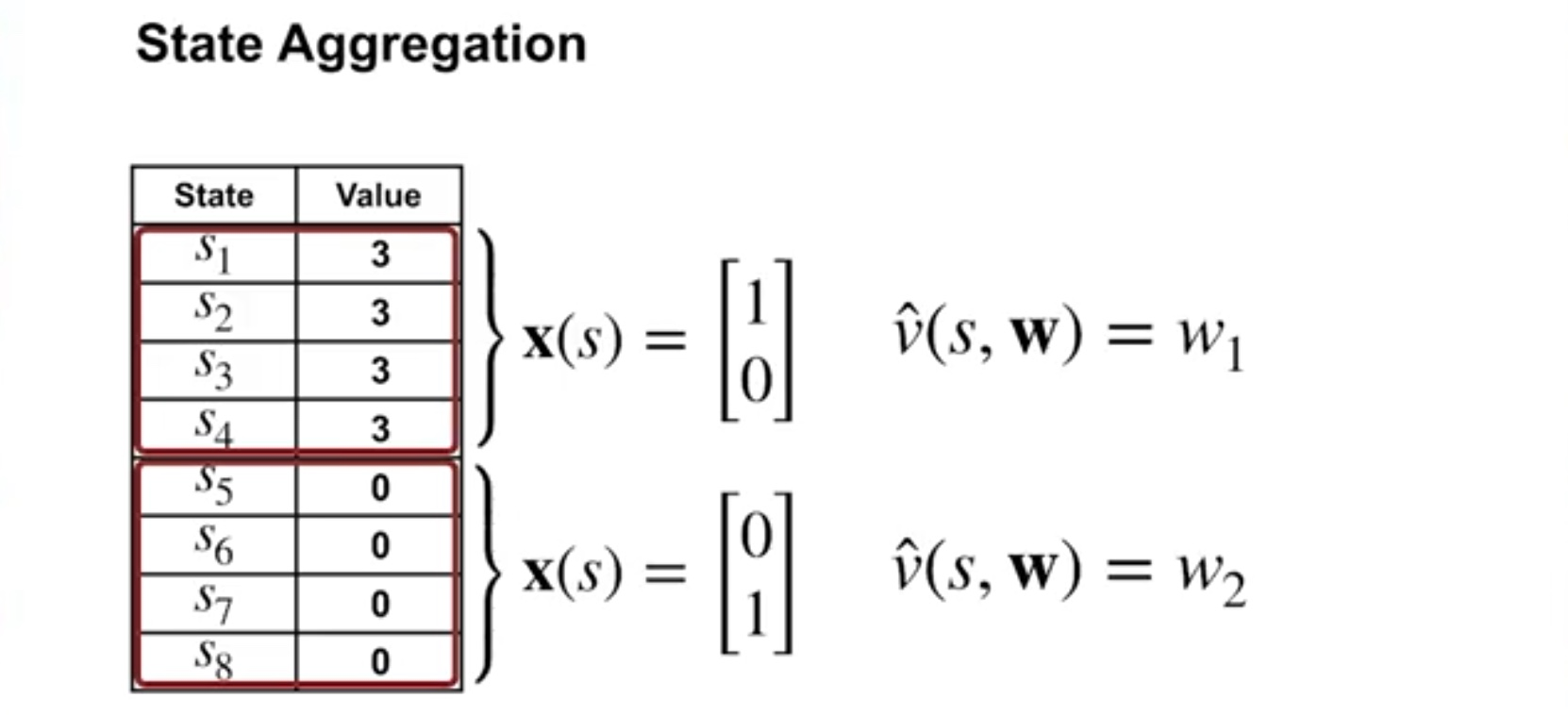
2.2.3 State Aggregation with Monte Carlo
Random Walk Example
정중앙에서 시작해서 양쪽 끝으로 가면 도착인 문제
행동은 좌우로 각 50% 확률을 가진다.
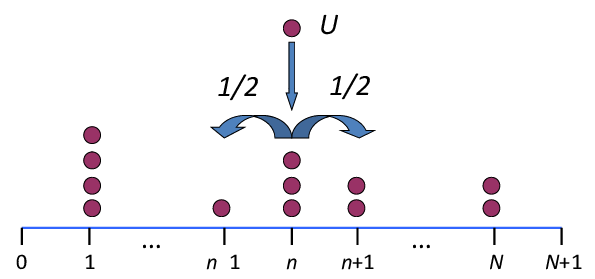
각 상태별로 가지는 value 값을 적어보고
같은 값을 가지는 상태끼리 그룹화를 하는 식으로 aggregation을 할 수 있다.

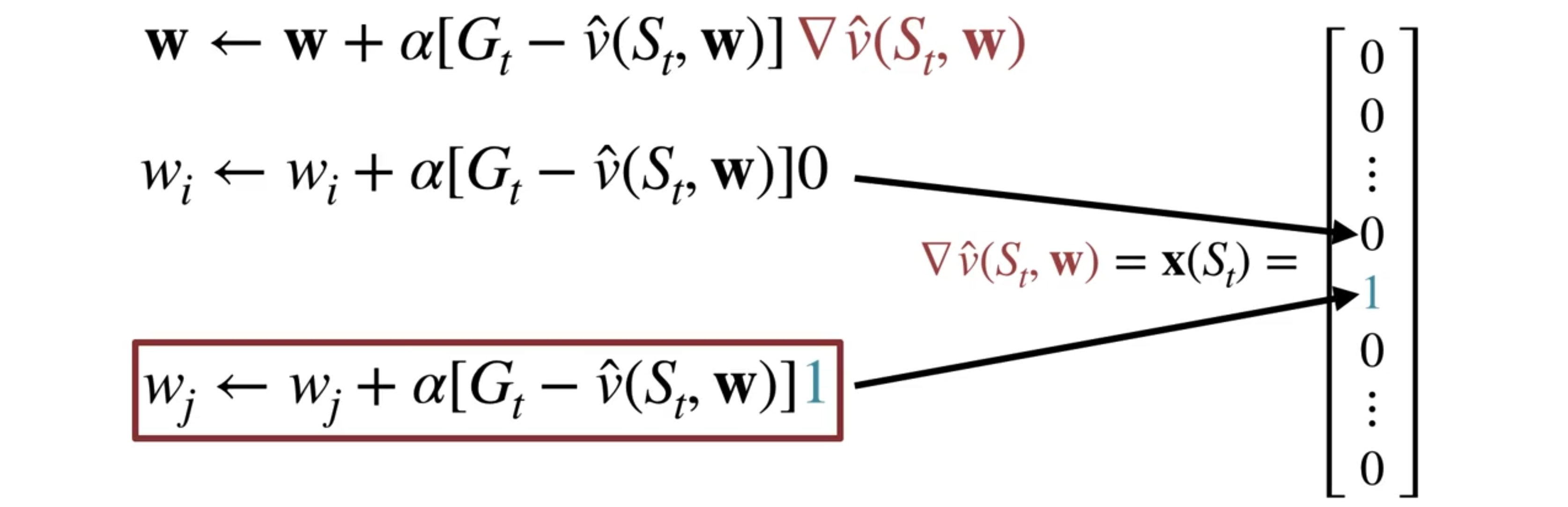
How to Compute the Gradient for MC with State Aggregation
아래 식을 보면 알 수 있듯이,
sample return vπ(St,w)보다 Gt가 크면 가중치 w가 증가한다
반대로의 경우에는 가중치는 감소하고.
그래서 이 문제는 Gradient Descent와 관련있다.
Monte Carlo Updates for a First Episode
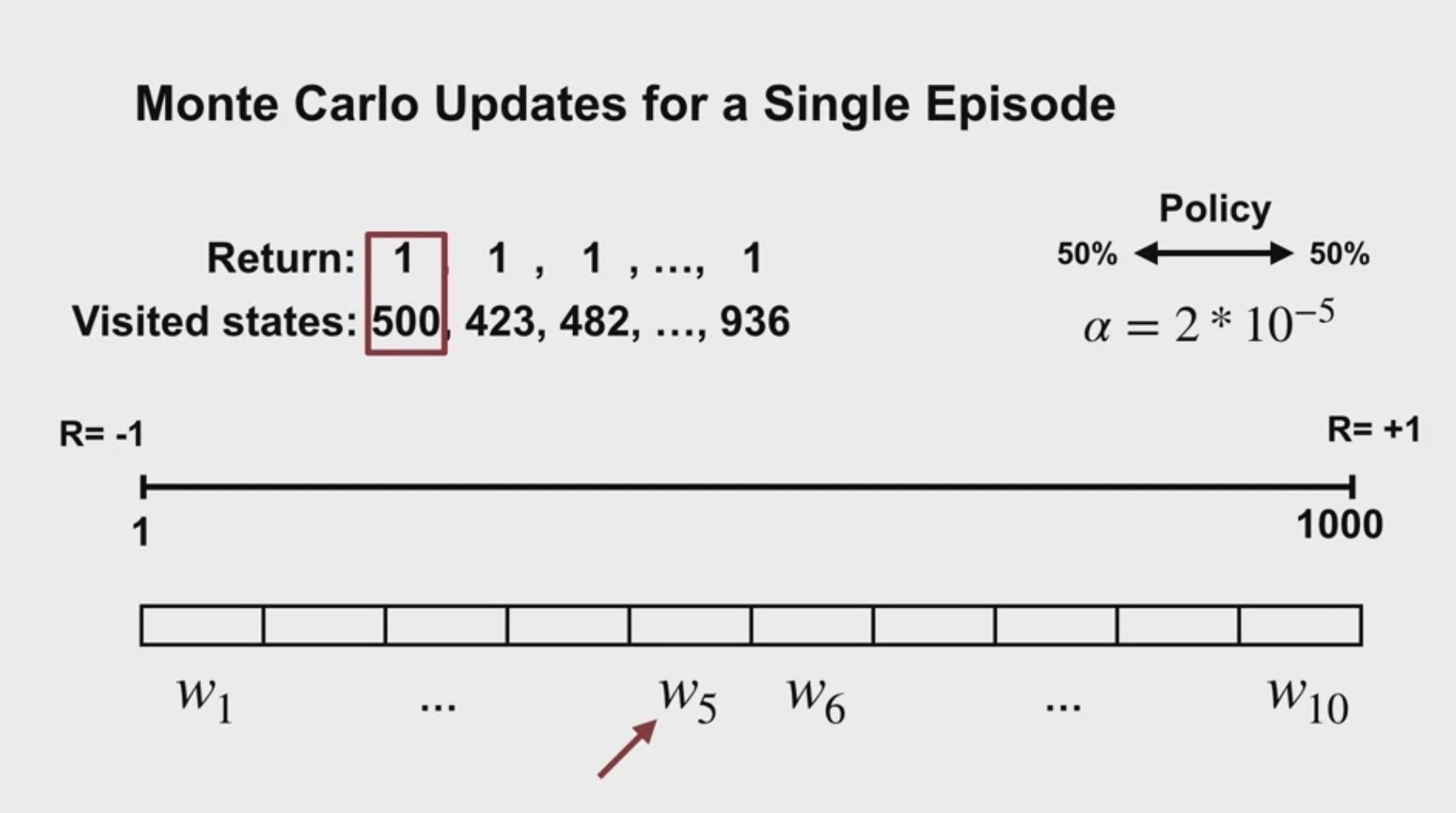
하나의 에피소드, 한 줄의 궤적이 visited states라고 하면
각 위치 숫자는 그 state aggregation 구역에 속하기 때문에
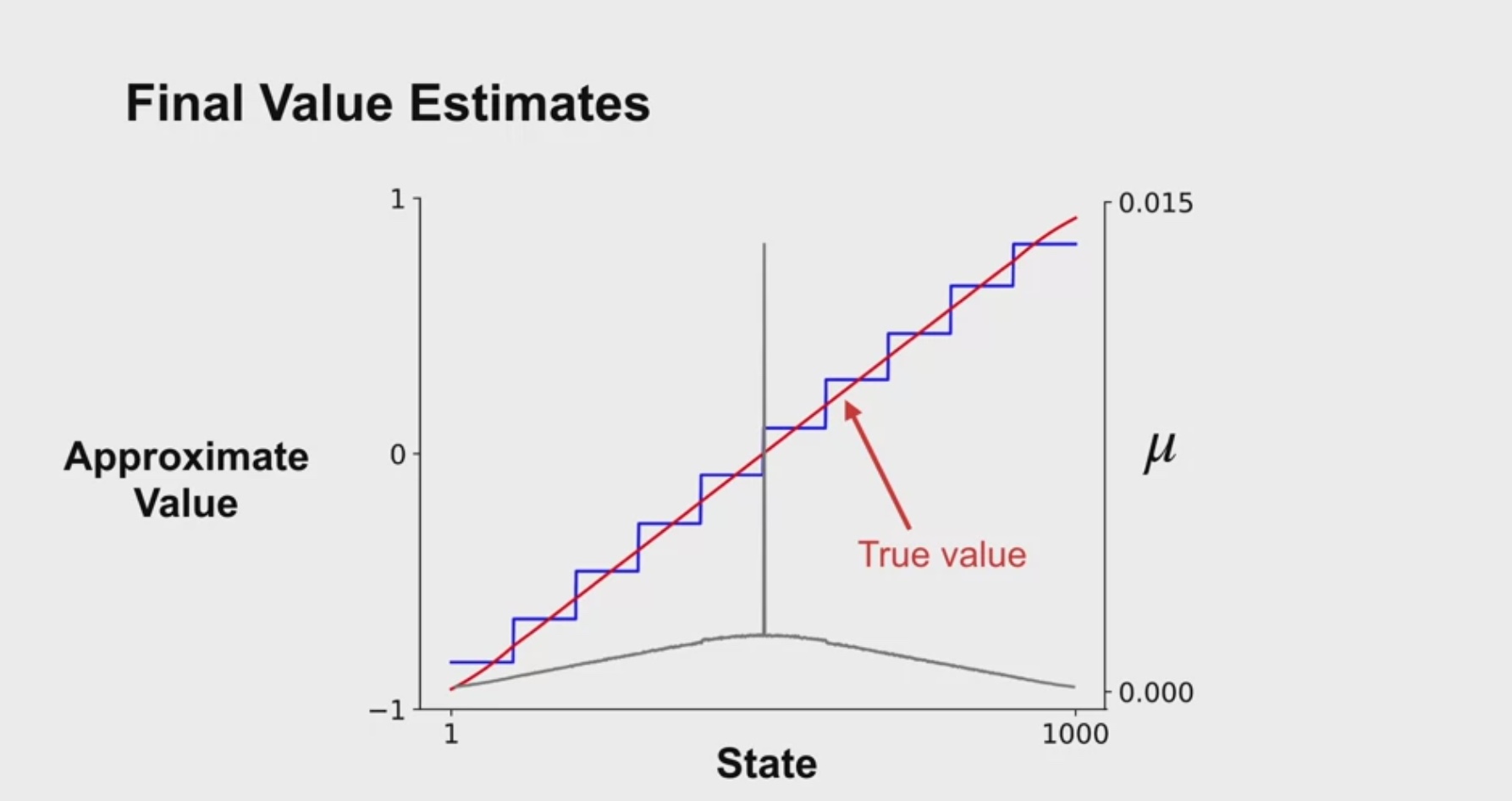
value function이 계단식으로 형성된다.
이 계단의 중심에 true value 직선이 지나간다.
μ는 각 상태에서 얼만큼 시간을 보냈는지에 대한 것임을 고려하면
state aggregation 결과가 계단식으로 출력되는 이유를 이해할 수 있다.
ㄹㄹ