9.0 해 탐색 알고리즘
범용적 알고리즘
언제 해 탐색 알고리즘을 사용하는가?
- 문제가 매우 복잡
- 근사 알고리즘 설계가 어려움
- 다항식 시간 내 찾기 어려움
종류
- 백트래킹 기법
- 분기 한정 기법
- 유전자 알고리즘
- 모의 담금질 기법
9.1 백트래킹 기법
백트래킹 기법이란?
- 해를 찾는 도중에 막히면 되돌아가서 해를 탐색하는 방법
최적화 문제(최솟값, 최댓값 찾는 문제)와결정 문제(해가 존재하는지 yes or no)를 해결 가능
과정
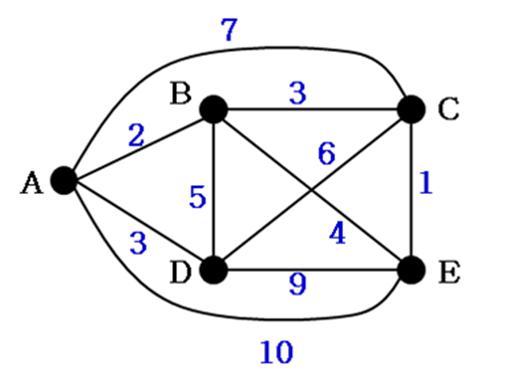
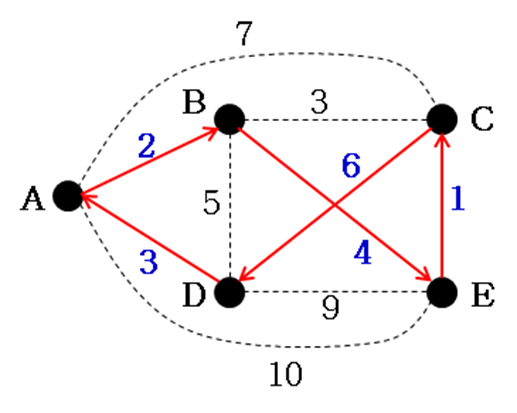
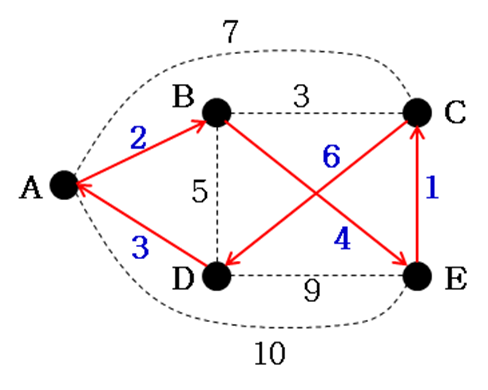
여행자 경로 문제
점 A = 시작점
tour = [A]
bestSolution = ([A], ∞) 초기화
-
[A]가 완전한 해가 아니므로 tour [A]를 확장할 수 있는 점 찾기
- 점 B, C, D, E
- 각 점에 대해 거리 합 구하기
-
먼저 점 B에 대해서 거리 합 구하기
- newTour=[A,B]
- newTour 거리: 2
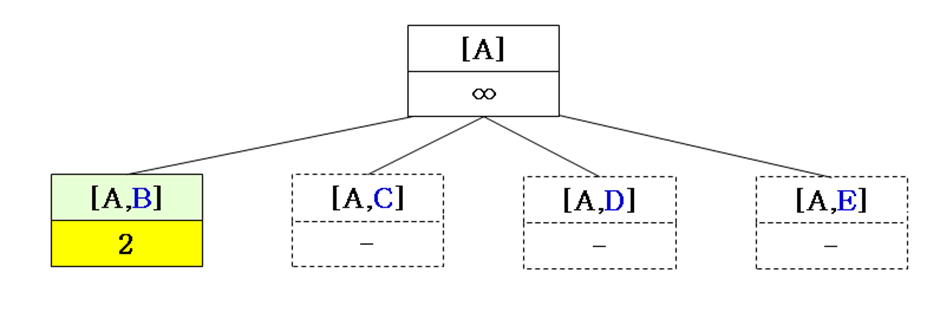
- newTour의 거리(2) < bestSolution의 거리(∞)
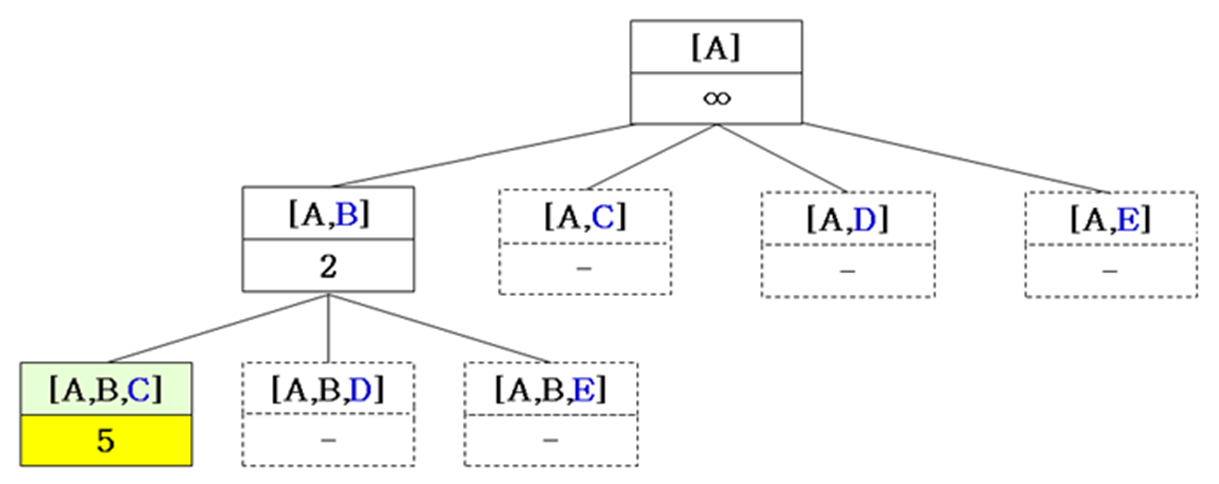
- BacktrackTSP([A,B]) 재귀 호출
- 확장 가능한 점 C, D, E에 대해서는 BacktrackTSP([A,B]) 호출을 다 마친 후에 각각 수행
-
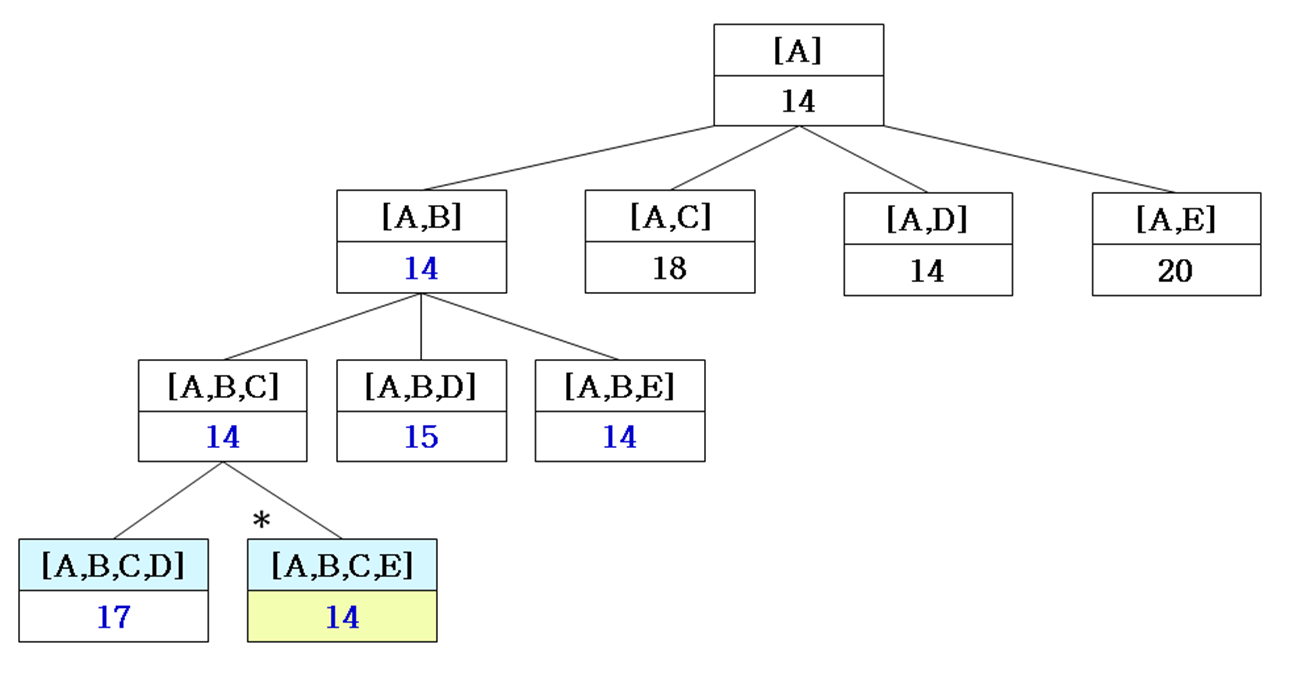
첫 번째 완전한 해
- bestSolution=([A,B,C,D,E,A], 30)
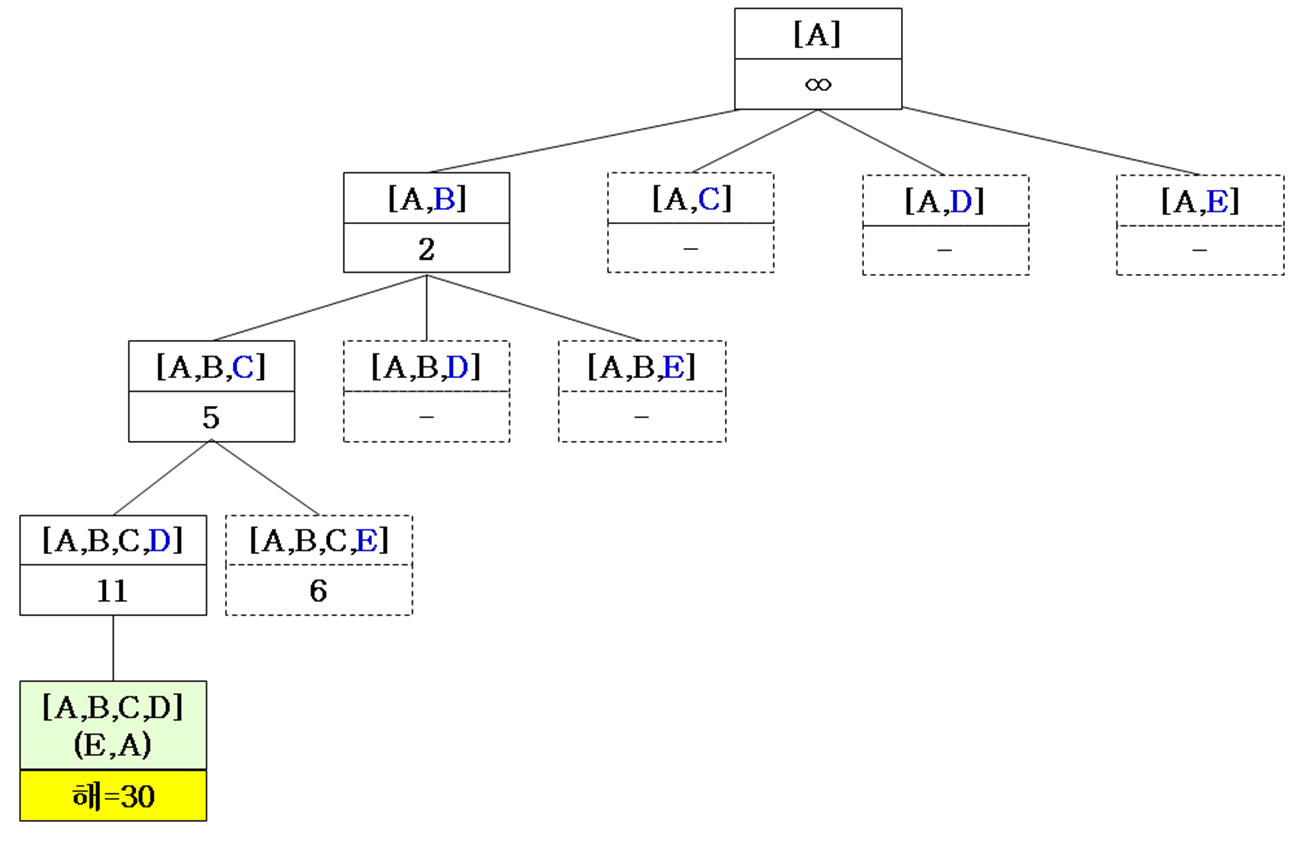
- bestSolution=([A,B,C,D,E,A], 30)
-
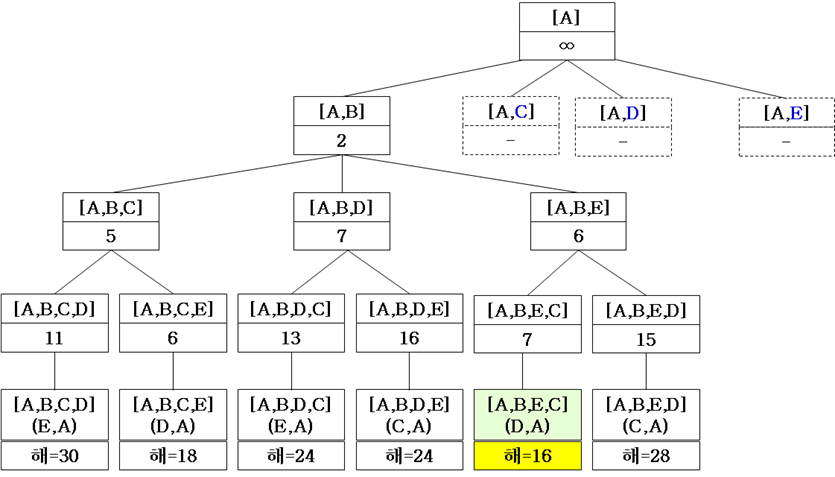
더 짧은 해를 구해 업데이트
-
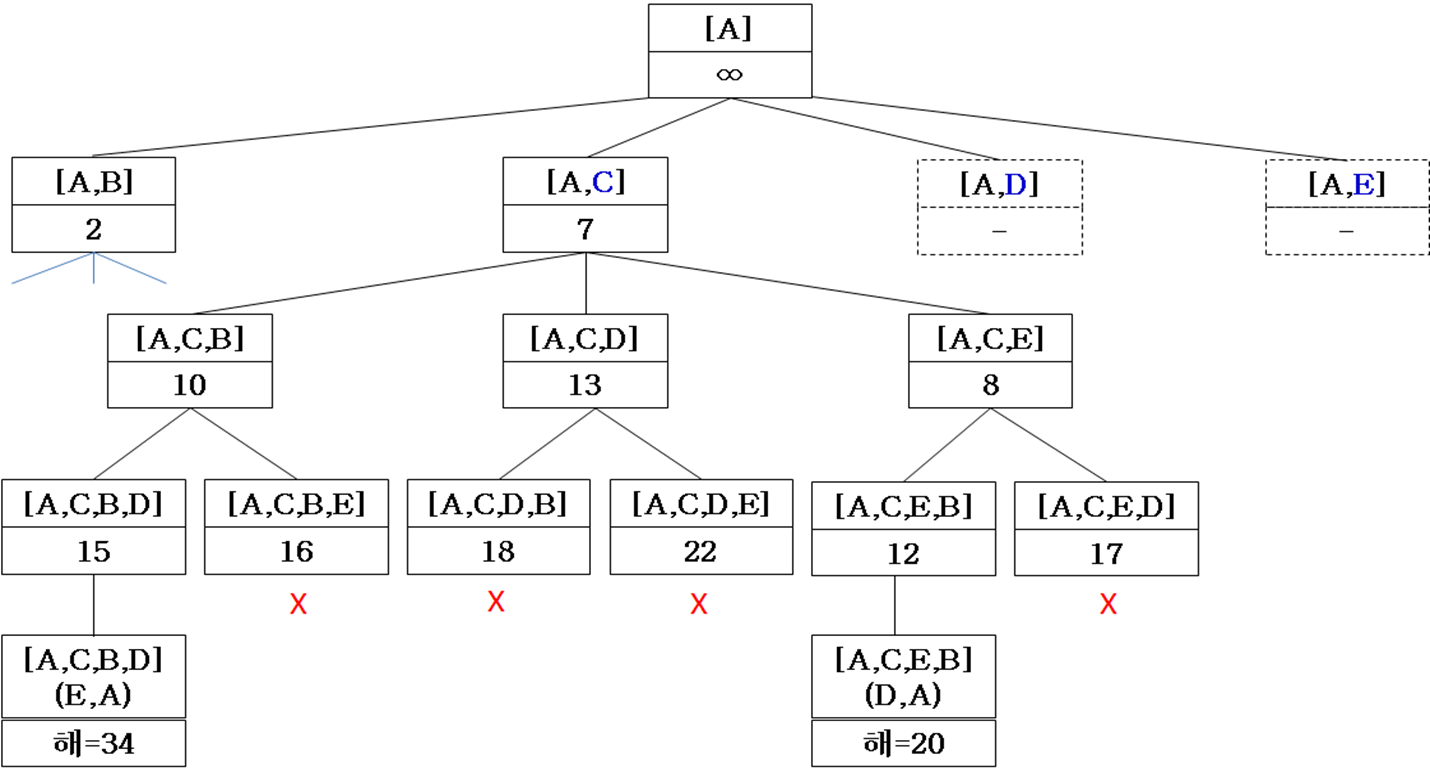
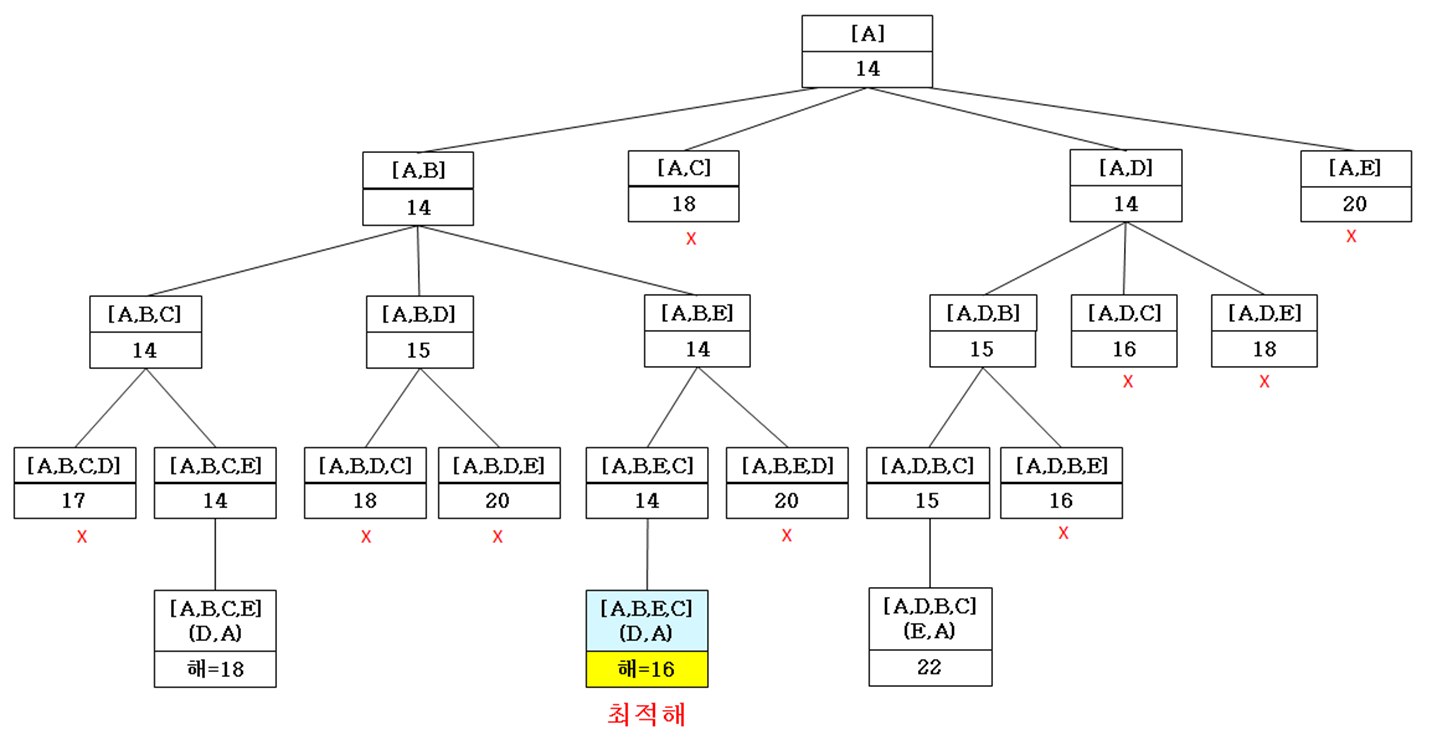
tour=[A,C] 탐색 결과
- bestSolution보다 더 우수한 해는 탐색되지 않음.
- x 상태의 거리 > bestSolution의 거리 ->
가지치기
-
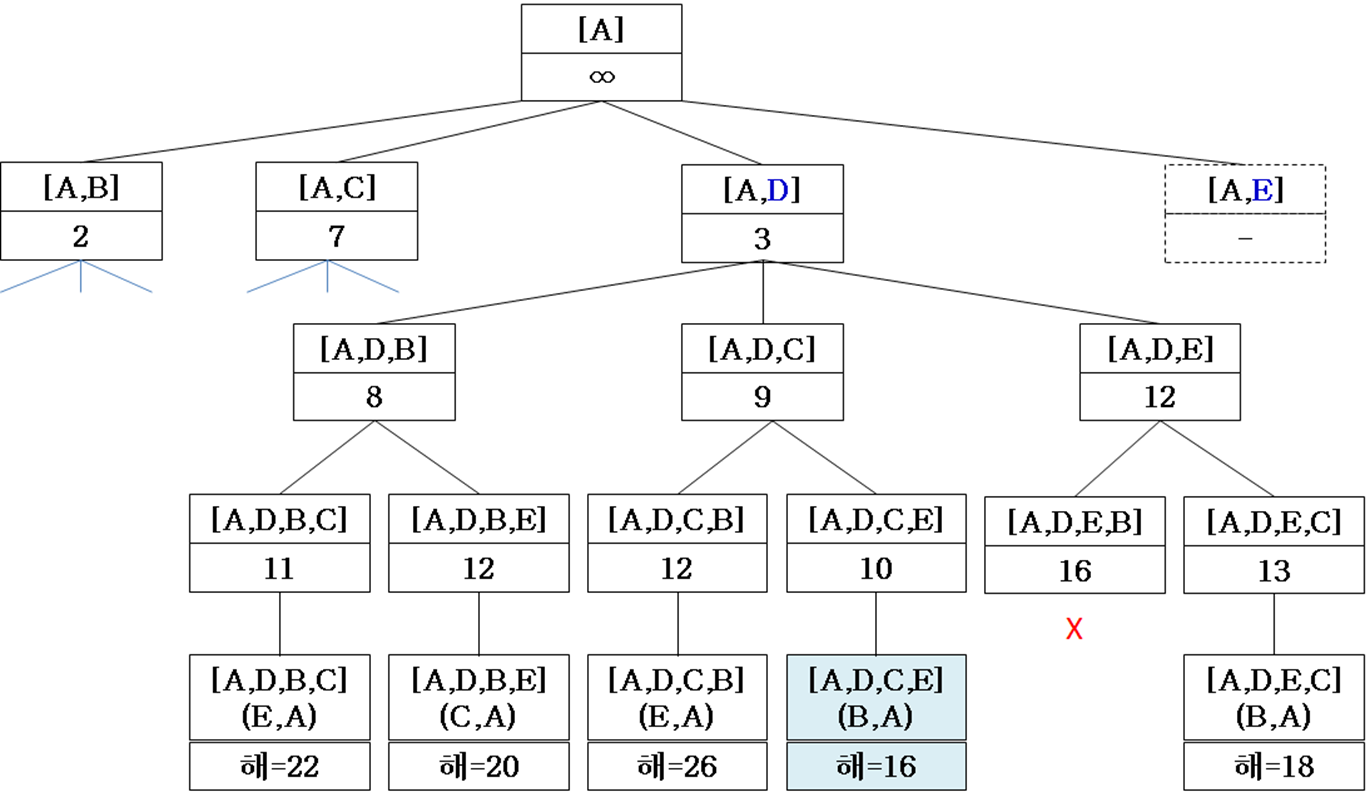
tour=[A,D] 탐색 결과
- bestSolution보다 더 우수한 해는 탐색되지 않음.
- 같은 거리의 해 -> bestSolution tour의 역순
- x 상태의 거리 > bestSolution의 거리 ->
가지치기
-
tour=[A,E] 탐색 결과
- bestSolution보다 더 우수한 해는 탐색되지 않음.
-
최종해 [A, B, E, C, D, A], 거리 16
의사코드
tour = [시작점] // 점의 순서
bestSolution = (tour, ∞) // 거리 무한대 초기화
BacktrackTSP(tour) {
if (tour가 완전한 해이면)
if (tour의 거리 < bestSolution의 거리) // 더 짧은 해를 찾았을 때
bestSolution = (tour, tour의 거리)
else
{
for (tour 확장 가능한 각 점 v)
{
newTour = tour + v // 기존 tour의 뒤에 v 를 추가
if (newTour의 거리 < bestSolution의 거리)
BacktrackTSP(newTour) // 재귀호출
}
}
}시간복잡도
-
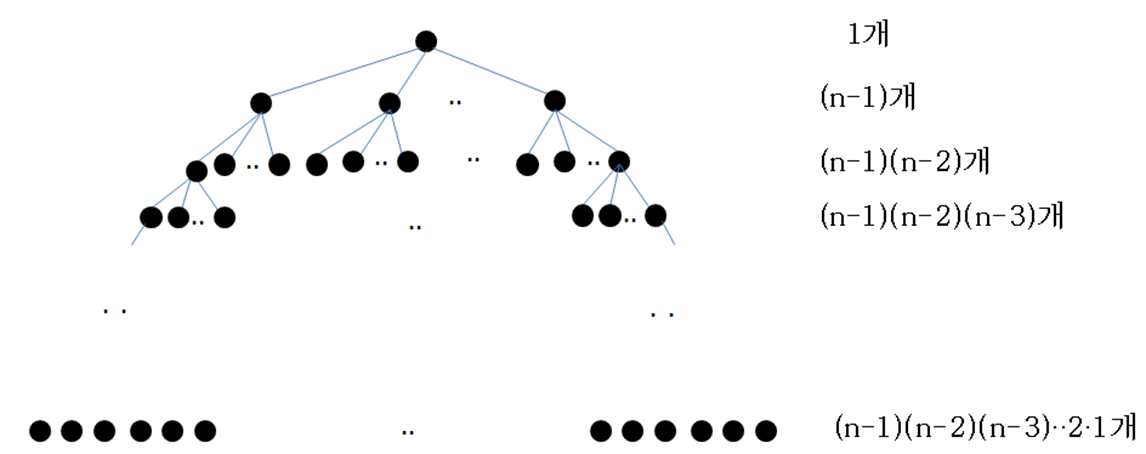
상태 공간 트리의 노드 수에 비례
-
n개의 점이 있는 입력 그래프, 최대 크기의 상태 공간 트리
- 단말 노드 수만 계산해도 (n-1)!
- 단말 노드 수만 계산해도 (n-1)!
-
이진트리 형태의 상태 공간 트리
- 최악의 경우에 개의 노드를 모두 탐색 -> 지수 시간
-
완결 탐색의 시간복잡도와 같음
- 그러나
가지치기작업으로 훨씬 효율적으로 동작
- 그러나
9.2 분기 한정 기법
백트래킹 기법의 단점
- 백트래킹 기법 -> 깊이 우선 탐색 수행
- 최적화 문제에 대해서는 최적해가 상태 공간 트리의 어디에 있는지 알 수 없으므로, 트리에서 대부분의 노드를 탐색하여야 함
- 입력의 크기가 커지면 해를 찾는 것은 거의 불가능
분기 한정 기법이란?
-
상태 공간 트리의 각
노드(상태)에 특정한 값(한정값)을 부여 -
노드의 한정값을 활용하여
가지치기 -
백트래킹 기법보다 빠르게 해 탐색
-
가장 우수한 한정값을 가진 노드를 먼저 탐색하는
최선 우선 탐색으로 해 탐색 -
최적화 문제 해결에 적합
탐색 원리
-
최적해를 찾은 후에, 탐색하여야 할 나머지 노드의 한정값이 최적해의 값과 같거나 나쁘면 더 이상 탐색하지 않는다.
-
상태 공간 트리의 대부분의 노드가 문제의 조건에 맞지 않아서 해가 되지 못한다.
-
최적해가 있을 만한 영역을 먼저 탐색한다.
과정
여행자 경로 문제
- 한정값
- 시작점부터 점 x까지의 경로 길이에다가 점 x를 떠나서 남은 다른 점들을 1번씩만 방문하고 시작점으로 돌아오는 경로의
예측길이- 앞으로 방문해야 할 각 점 x에 연결된 선분 중에서
가장 짧은 두 선분의 가중치의 평균의 합사용!
- 가중치의 합을 1/2로 곱하는(평균을 내는) 이유는 한 점에서 나가는 선분은 인접한(다른) 점으로부터 들어오는 선분과 동일
- 소수점 이하의 숫자는 올림
점 A = 시작점
초기 상태 = [A]
-
초기 상태 [A]의 한정값 계산
- 각 점의 인접한 선분 중에서 가장 작은 2개의 가중치
A: 2, 3
B: 2, 3
C: 1, 3
D: 3, 5
E: 1, 4 - [(2+3) + (2+3) + (1+3) + (3+5) + (1+4)] x 1/2 = 27/2 = 14
- 각 점의 인접한 선분 중에서 가장 작은 2개의 가중치
-
activeNodes={S}, bestValue=∞로 각각 초기화
- activeNodes 집합이 공집합이 될 때까지
-
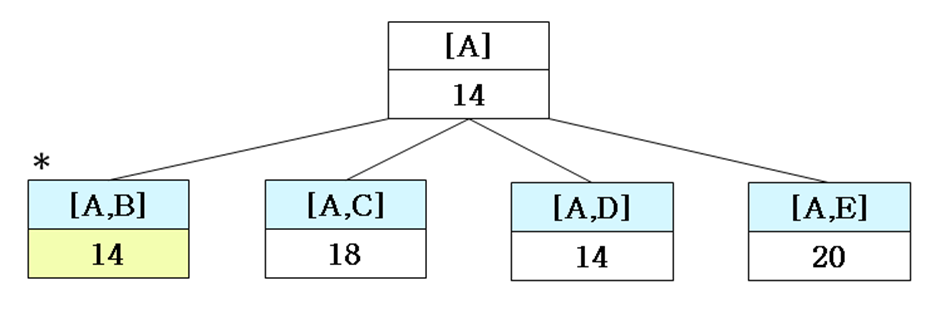
=[A], [A]가 activeNodes 집합으로부터 제거
-
([A])의 자식 상태 노드 생성, 각각 한정값을 구한다.
-
S’1=[A,B], S’2=[A,C], S’3=[A,D], S’4=[A,E]
-
S’1, S’2, S’3, S’4를 activeNodes에 추가
- activeNodes = {[A,B], [A,C], [A,D], [A,E]}
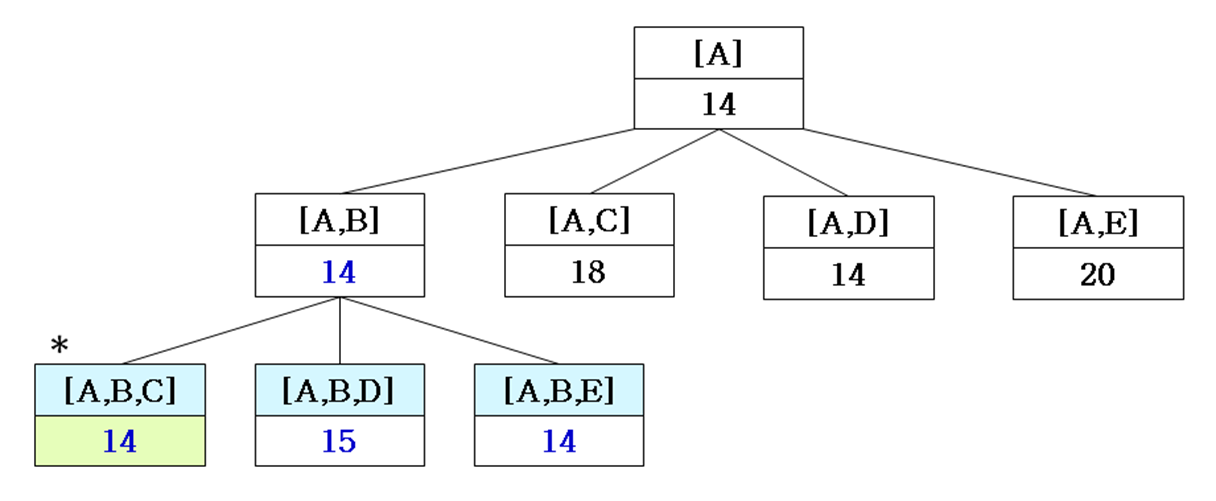
-
계속 자식 생성하여 수행
-
첫 번째 해 발견, 경로 거리 < bestValue(∞)
- bestValue=18, bestSolution=[A,B,C,E,D,A]
- bestValue=18, bestSolution=[A,B,C,E,D,A]
-
[A, B, E] 탐색 시작, 최적해 발견
- [A,B,E,C,D,A] 최적해, 경로의 길이
- [A,B,E,C,D,A] 최적해, 경로의 길이
의사코드
- 입력: S, 문제의 초기 상태
Branch-and-Bound(S) {
S의 한정값 계산
activeNodes = { S } // 탐색되어야 하는 상태 집합
bestValue = ∞ // 현재까지 탐색된 해 중 최솟값
while ( activeNodes ≠ ∅ )
{
S_min= activeNodes의 상태 중, 한정값이 최소인 상태
S_min을 activeNodes에서 제거
S_min의 확장 가능한 노드 S’1, S’2, ..., S’k 생성
각각의 한정값 계산
for i=1 to k
{ // 확장한 각 자식 S’i
if (S’i의 한정값 ≥ bestValue)
S’i 가지치기
else if (S’i가 완전한 해 & S’i의 값 < bestValue)
bestValue = S’i의 값
bestSolution = S’i
else
activeNodes에 S’i 추가한다. // 나중에 S’i 탐색 수행
}
}
}