Filter
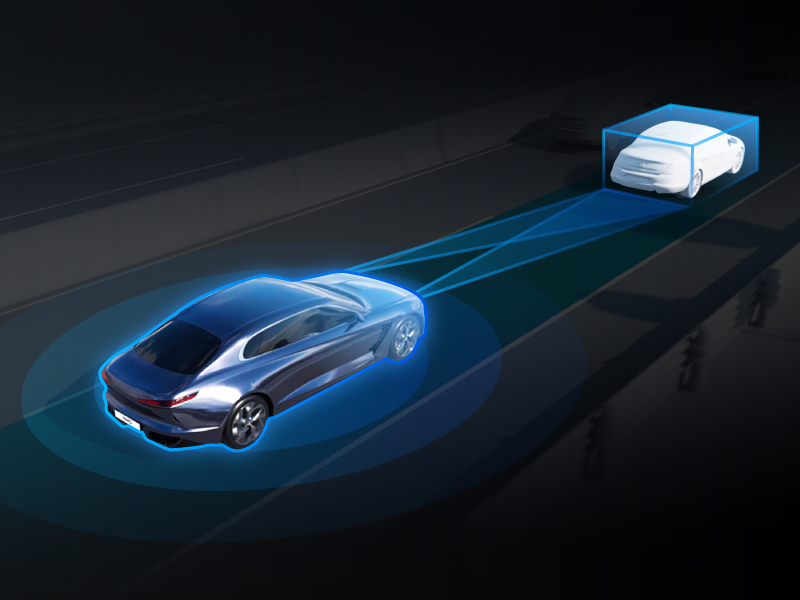
자율주행 분야에서 필터(filter)는 주로 센서 데이터를 처리하고 차량 상태를 추정하는데 사용된다. 센서 데이터는 종종 잡음이나 오차가 있으며 필터는 이러한 데이터에서 원하는 정보를 추출하고 불확실성을 줄이는데 도움을 준다
재귀 필터(Recursive filter)
- 현재 상태를 추정하기 위해 이전 시점의 상태 추정값과 현재 시점의 측정값을 사용
- 계산의 효율성이 높고 온라인 구현이 가능
- 차량의 속도, 위치, 방향, 자세 등의 상태를 추정
- 추정한 추정치는 주변 환경 인식, 경로 계획, 제어 등의 모듈에 사용
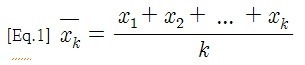
평균 필터(Average filter)
평균필터의 배치식
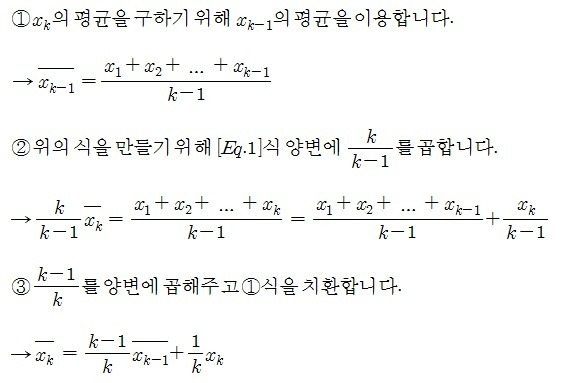
평균필터의 재귀식과 유도 과정

- 입력 신호의 슬라이딩 윈도우 내에서 샘플들의 산술 평균을 구해 잡음을 제거하고 신호를 부드럽게 만듬
- 매우 간단하며 실행 속도가 빠르며 계산적으로 효율적이다
- 시계열 데이터의 단기적인 변동을 줄이고 잡음을 제거하는데 효과적이다
- 날카로운 변화를 가진 신호의 경우 평균값을 내는 특성을 가진 필터기 때문에 신호의 특징을 손상시킨다
- 선형 시스템에만 적용되며 비선형 시스템에는 적합하지 않다
- 대역폭이 좁은 노이즈를 제거하는 데는 덜 효과적이다
이동 평균 필터(Moving average filter)
이동 평균 필터의 배치식

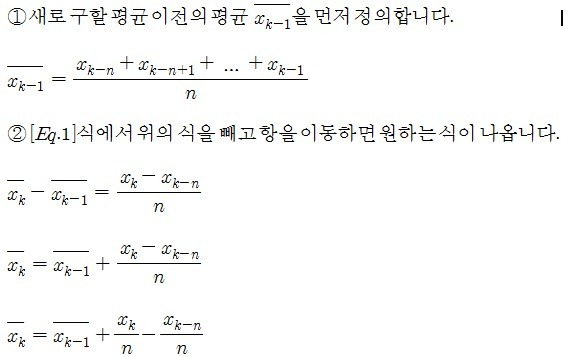
이동 평균 필터의 재귀식과 유도 과정

- 평균 필터와 같은 원리로 잡음을 제거하고 신호를 부드럽게 만들지만 새로운 값이 들어오면 오래된 값을 제거한다
- 기존의 평균 필터와 엄청난 차이를 보이지는 않음
저주파 통과 필터(Low pass filter, LPF)
저주파 통과 필터의 배치식

저주파 통과 필터의 재귀식
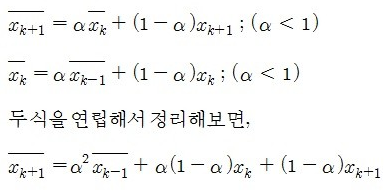
- 동일한 가중치의 이동평균
- 최근 데이터의 가중치를 높게 설정한다
- 센서 데이터와 함께 들어오는 노이즈와 고주파 성분에서 노이즈를 제거해 원하는 정보만을 추출
- 필터링에 의해 중요한 정보를 손실할 수 있으며 이로 인해 신호 왜곡이 발생해 성능에 영향을 미칠 수 있다
칼만 필터(Kalman filter)
- 입력과 출력이 하나씩인 간단한 구조로 되어있다
- 선형 동적 시스템에 대해 최적의 상태를 추정하는 재귀 필터링 알고리즘이다
- 불확실한 관측 값을 기반으로 시스템의 상태를 추정하고 센서 데이터 융합, 노이즈 제거 및 상태 예측을 할 수 있다
