자율주행
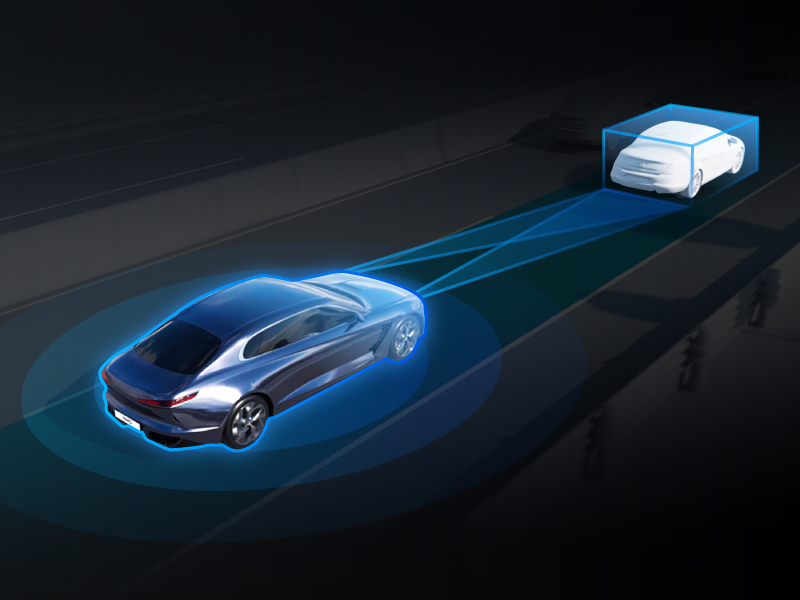
1.자율주행 자동차 개념
운전자 또는 승객의 조작 없이 자동차 스스로 운행이 가능한 자동차를 말한다미국 자동차기술학회(SAE)는 자동 주행 자동차 기술을 6단계로 구분했다출처 도로교통부출처 현대자동차출처 현대자동차HD Map(High Definition Map)은 주변환경 정보가 3D로 구현된
2.자율주행 자동차 기술_1
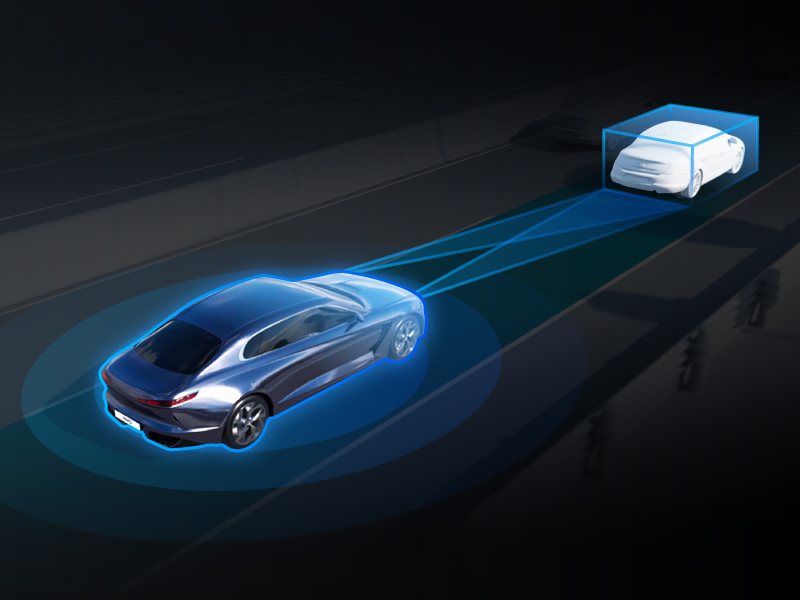
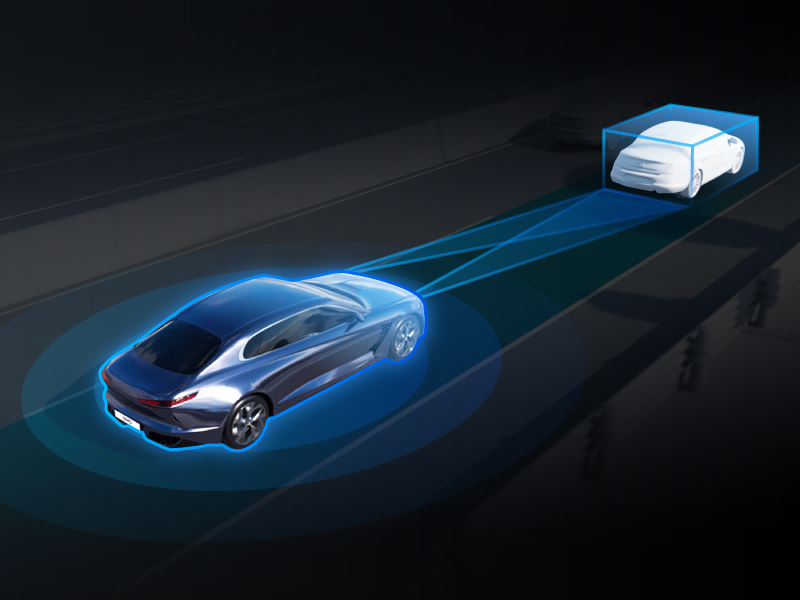
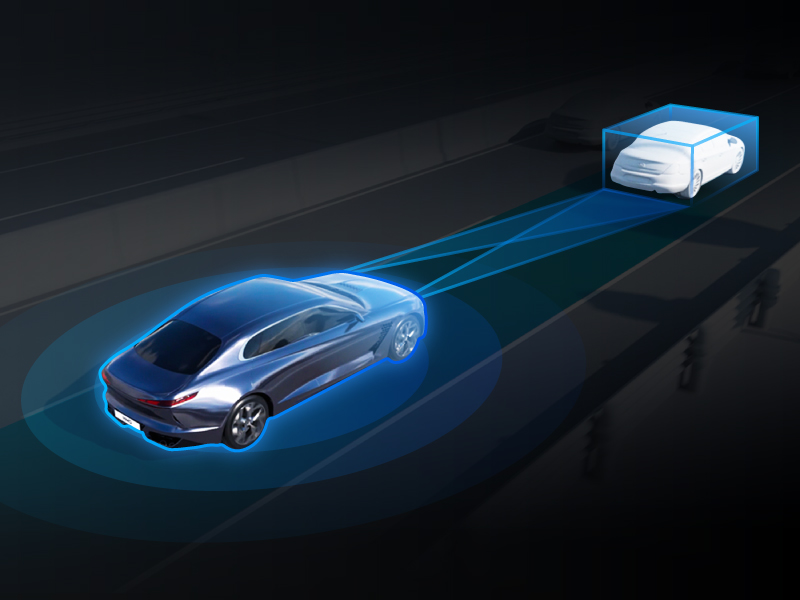
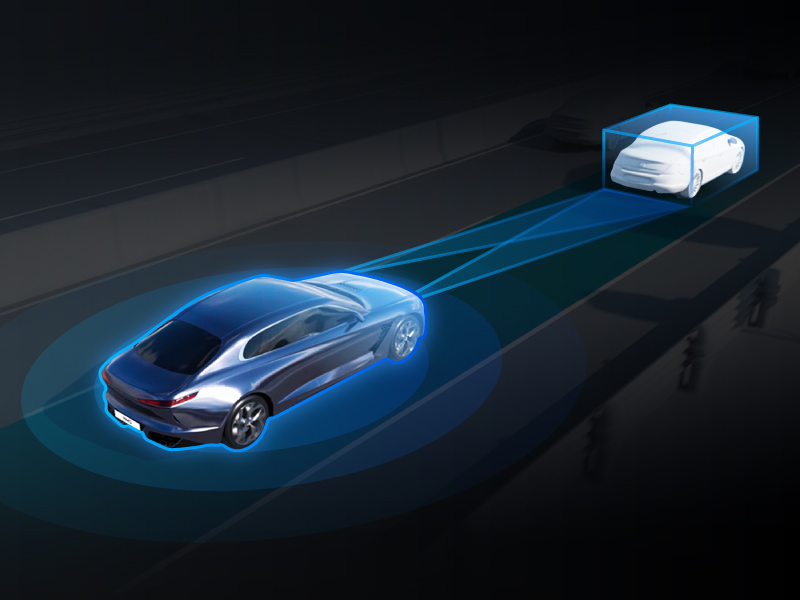
로봇이나 자율주행차량이 주어진 공간(Map)의 어디에 있는지 예측하는 방법위치를 측정해서 확률을 업데이트하고 움직이는 과정의 반복정밀지도와 연동하여 차량의 현재 위치를 파악한다라이다, 카메라를 이용목적지까지의 경로 찾기중간 목적지 또는 최종 목적지까지의 경로 교차로에서
3.자율주행 자동차 기술_2
오픈 소스로 제공되는 자율주행차량 소프트웨어 플랫폼자율주행차량 개발에 필요한 기능과 알고리즘을 제공하며 연구자와 엔지니어들이 자율주행 기술을 개발하고 실험하는 데 사용SAE-레벨2실차에 바로 적용 가능한 솔루션30개 이상의 국가에서 사용100개 이상의 회사들 사용20개
4.Coordinate State Space & Modeling
Coordinate State Space 좌표 상태 공간(Coordinate State Space)은 자율주행 시스템에 사용되는 공간 표현 방식이다 이 공간에서 다양한 요소들이 동작하며, 그 요소들의 상태와 위치를 파악하고 추적하는 데 사용된다 Coordinate s
5.Filter
자율주행 분야에서 필터(filter)는 주로 센서 데이터를 처리하고 차량 상태를 추정하는데 사용된다. 센서 데이터는 종종 잡음이나 오차가 있으며 필터는 이러한 데이터에서 원하는 정보를 추출하고 불확실성을 줄이는데 도움을 준다현재 상태를 추정하기 위해 이전 시점의 상태
6.Dubins Path Algorithm
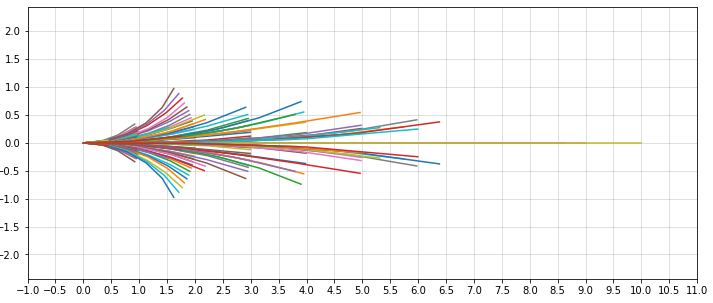
Dubins Path 알고리즘은 로봇이나 차량과 같은 이동체가 제한된 반경 내에서 움직일 때 최적의 경로를 계획하는 알고리즘이동체의 회전 반경과 가능한 직진 거리의 제약 조건을 고려해 경로를 생성한다로봇이 갈 수 있는 경로를 미리 계산(offline)미리 계산된 경로를