4) 언제 뭘 선택해?
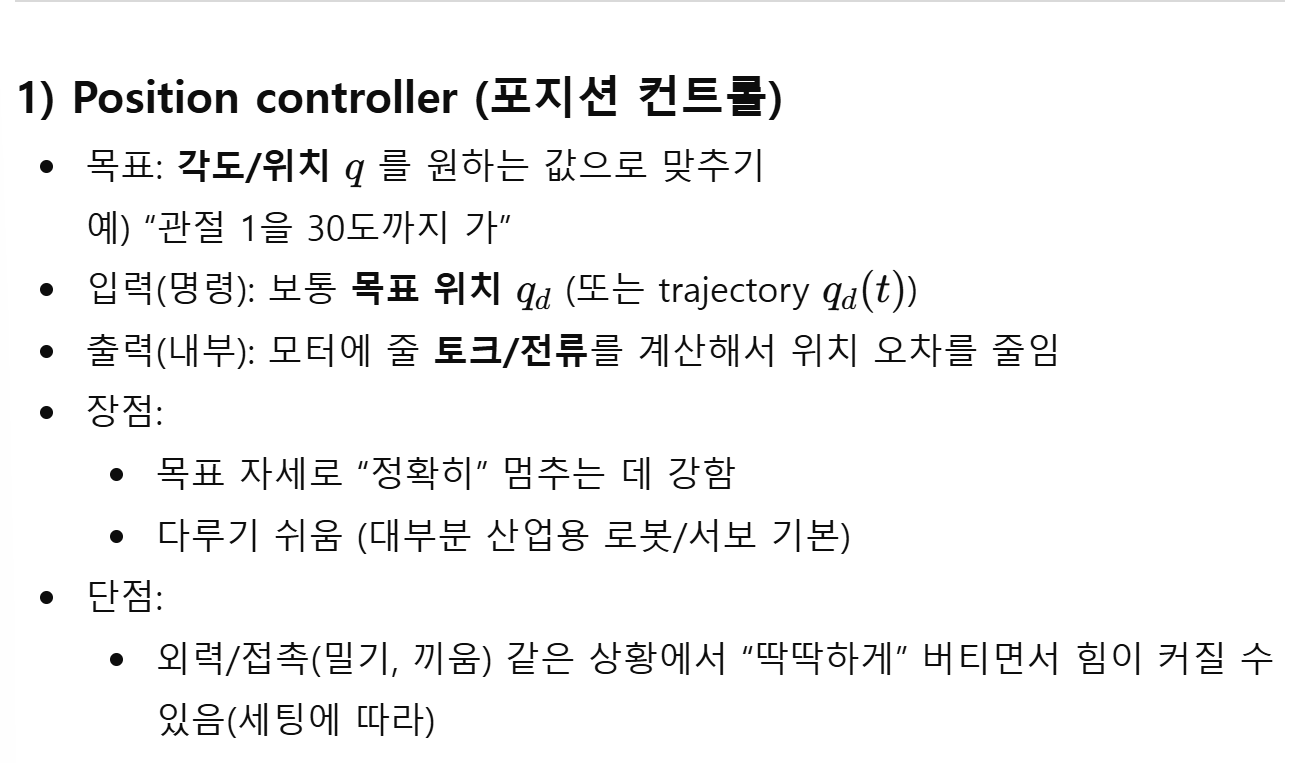
정해진 자세/각도로 정확히 가서 멈추기: Position control
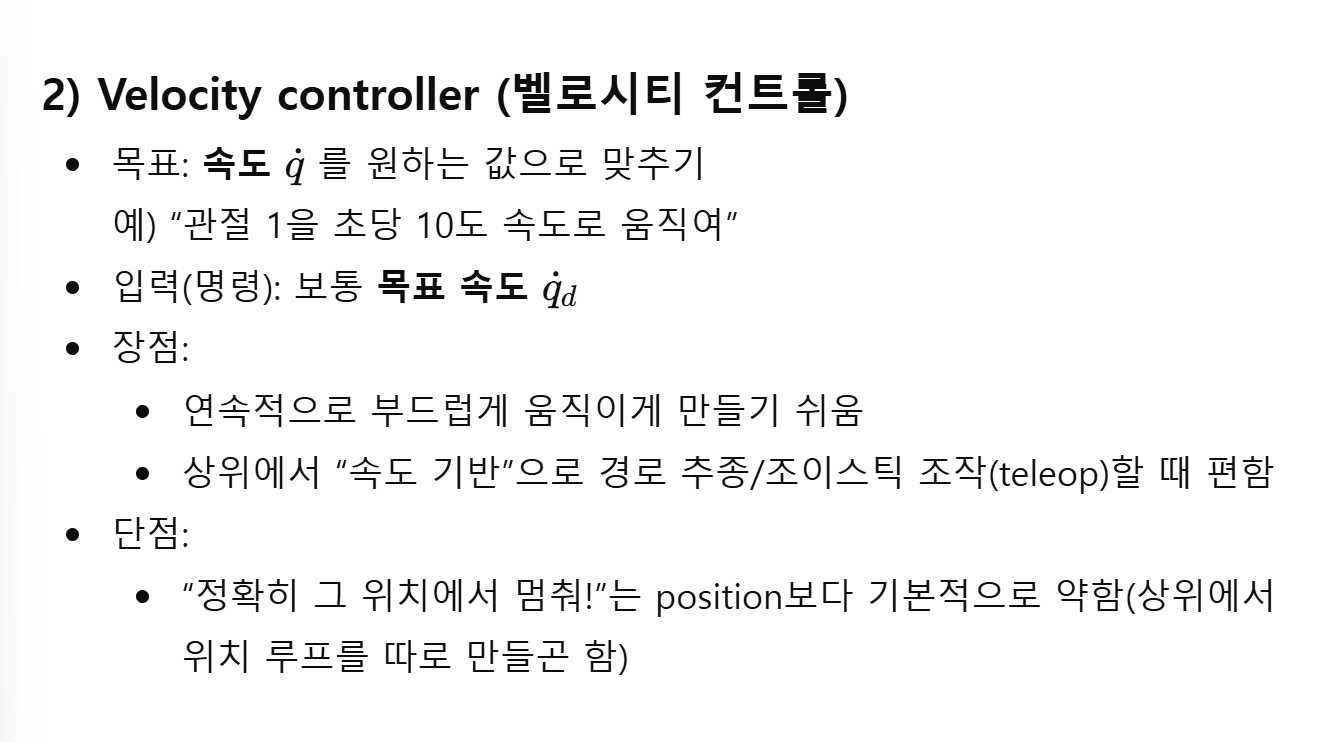
조이스틱/키보드로 부드럽게 움직이기, 베이스 주행(모바일 로봇), 연속 추종: Velocity control
접촉/힘 제어(삽입, 연마, 잡기): 보통 토크/임피던스(힘-위치 혼합) 쪽으로 확장

Like it, and it will be the best.
정해진 자세/각도로 정확히 가서 멈추기: Position control
조이스틱/키보드로 부드럽게 움직이기, 베이스 주행(모바일 로봇), 연속 추종: Velocity control
접촉/힘 제어(삽입, 연마, 잡기): 보통 토크/임피던스(힘-위치 혼합) 쪽으로 확장