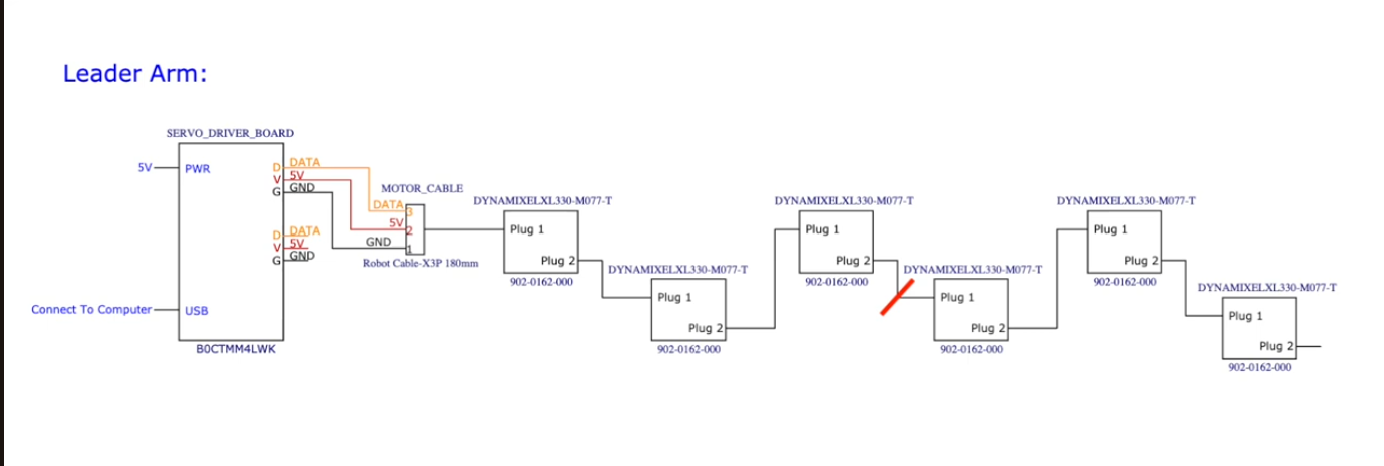
D = DATA (통신 신호)
V = 5V (전원 +)
G = GND (접지)
컴퓨터와 직접 연결하는 것이 아닌 보드를 통해서 연결한다.
리눅스에서 USB 시리얼 장치 권한을 임시로 풀어주는 명령어
'''
sudo chmod 666 /dev/ttyACM0
sudo chmod 666 /dev/ttyACM1
'''
/dev/ttyACM0, /dev/ttyACM1 는 뭐야?
아두이노 서보 드라이버 보드 USB-시리얼 장치 마이크로컨트롤러(예: STM32, ESP 계열 일부) 로봇 컨트롤러를 USB로 연결했을 때 생기는 시리얼 통신 포트예요.
임시해결이여서 장치를 다시 뽑았다가 꽂으면 권한이 변경될 수 있음
MotorBus가 연결된 USB 포트가 어떤 것인지 자동으로 찾는절차
아래 사진과 같이 배선을 뽑고 모터 1개만 연결하고 앤터치고 하는 방식을 하는 이유?
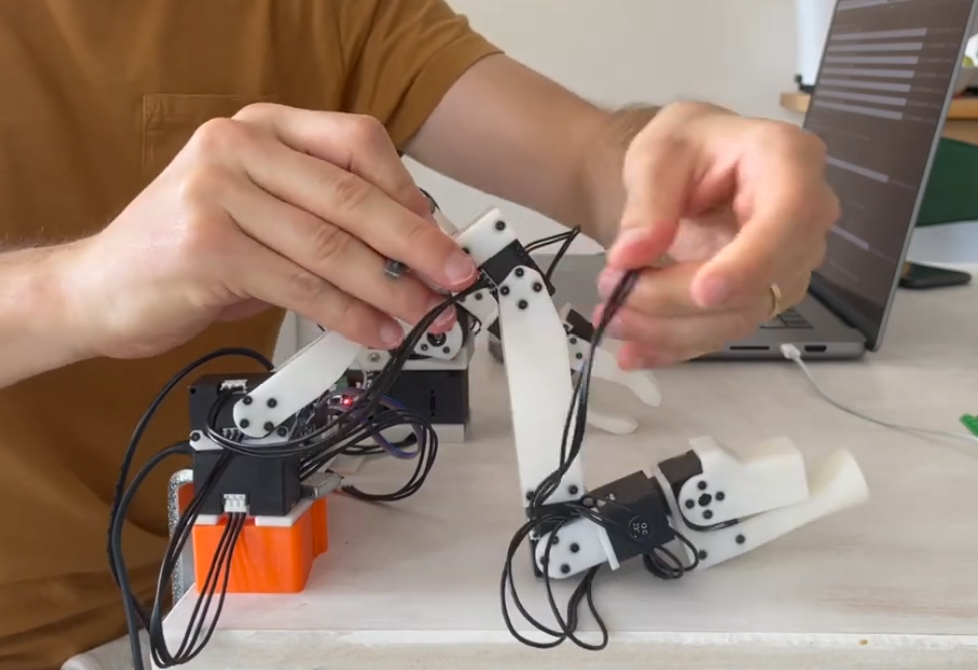
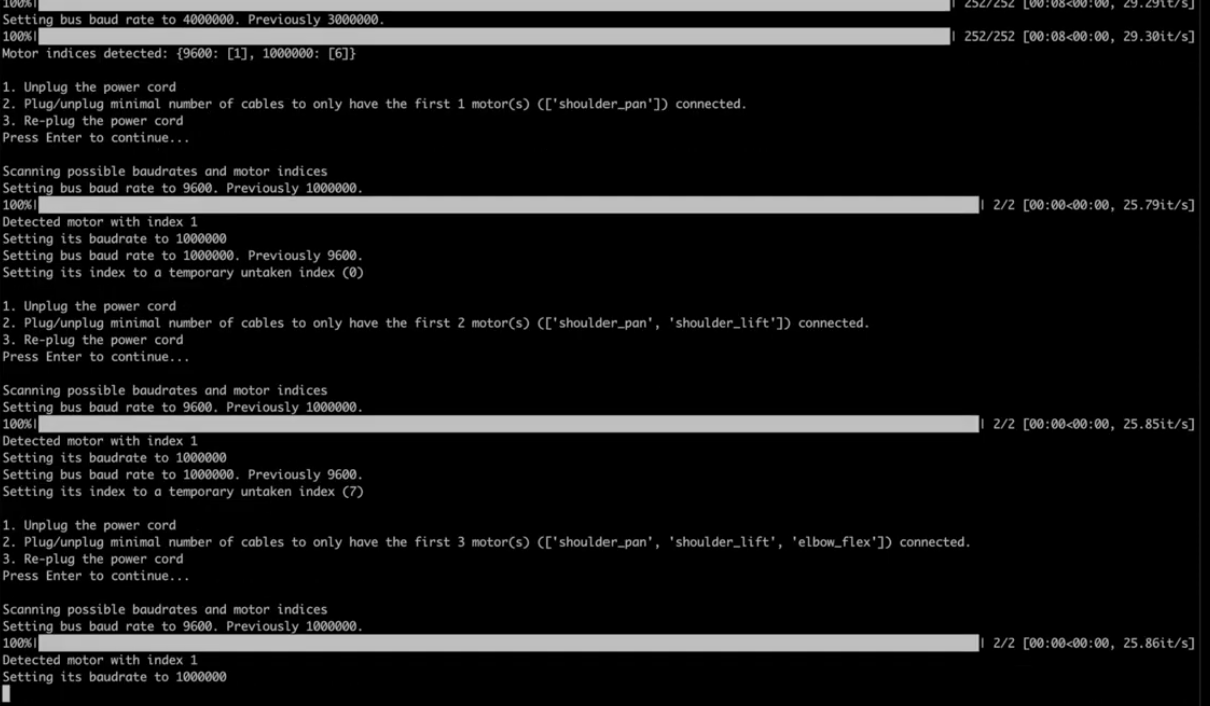
각 모터의 ID를 개별적으로(안 꼬이게) 설정/확인
Calibrate를 진행하는 이유
모터가 같은 숫자 명령을 받아도, 실제 관절 각도는 서로 다를 수 있기 때문에 기준점을 맞추기 위함
공식 레포 follow 링크

Like it, and it will be the best.