ROS와 Gazebo를 이용한 로봇 개발 시작!
ROS?
Robot Operating System(로봇 운영 체제)
Gazebo?
오픈 소스 로봇 시뮬레이터 프로그램
설치하기 🚧
ROS 설치하기 🛠
ROS 설치와 제어를 위해 리눅스 민트를 먼저 설치했다.
나는 기존에 Windows 10을 사용했었기에 듀얼부팅으로 구성했다.
리눅스 민트 사이트에서 이미지를 다운받아 GNUPG로 검증한 뒤 설치 USB를 만들어 무난하게 설치하였다.
윈도우가 날아가지 않도록 옵션만 잘 선택해 주면 된다.
터미널을 열고(alt+shift+t) 다음을 입력한다.
- UTF-8을 지원하는 locale 설정
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8- ROS 저장소 추가
sudo apt update && sudo apt install curl gnupg lsb-release
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(lsb_release -cs) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null- ROS 2 foxy 설치하기(많은 버전이 있지만 여기서는 foxy)
sudo apt update
sudo apt install ros-foxy-desktopGazebo 설치하기 🛠
터미널에 다음을 입력한다.
- Gazebo 설치
curl -sSL http://get.gazebosim.org | sh- 필요한 패키지 설치
sudo apt install ros-foxy-gazebo-ros-pkgs
sudo apt install ros-foxy-ros-core ros-foxy-geometry2실행해보기 💻
ROS turtlesim 예제 📁
터미널에 다음을 입력한다.
- ros2 소싱 추가
echo "source /opt/ros/foxy/setup.bash" >> ~/.bashrc- turtlesim 예제 실행
ros2 run turtlesim turtlesim_node다음과 같은 창이 생성된다.
이 상태에서 새 터미널을 열고 다음을 입력한다.
- turtlesim turtle_teleop_key 실행
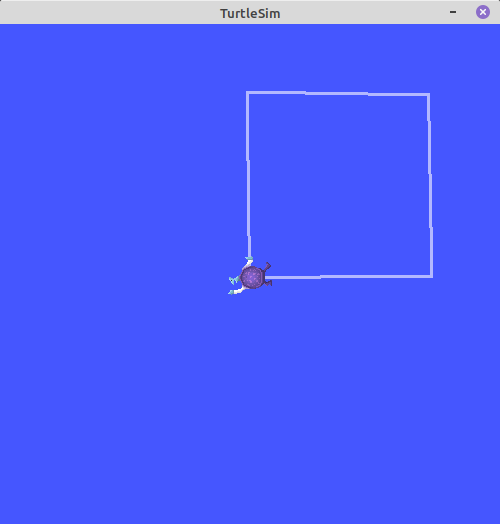
ros2 run turtlesim turtle_teleop_key방향키를 누르면 거북이가 움직이고, f와 인접한 8개의 키를 누르면 방향이 전환된다.
위와 같이 다양한 모양으로 이동시킬 수 있다.
Gazebo 실행 💡
터미널에 다음을 입력한다.
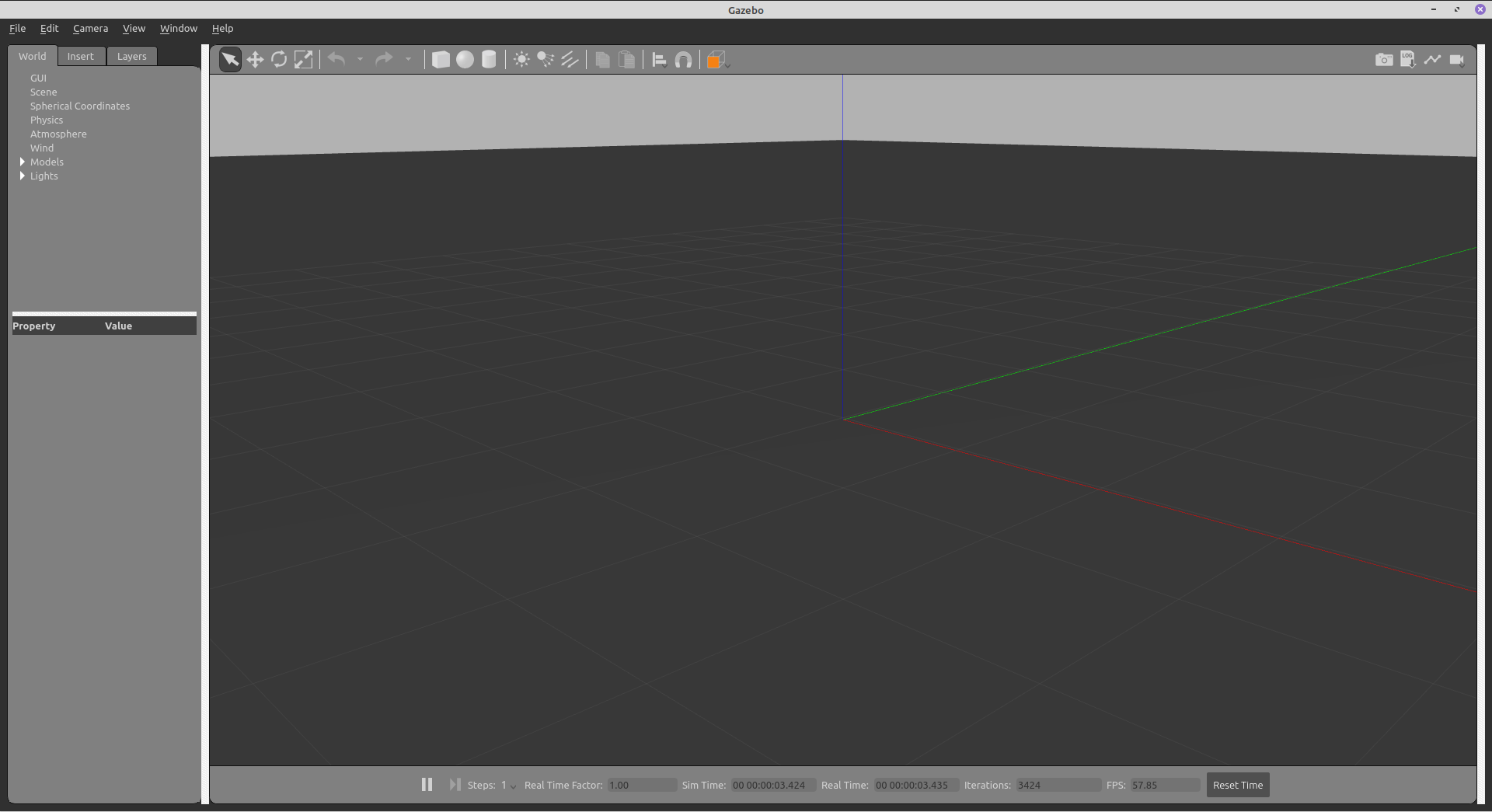
gazebo다음과 같이 프로그램이 실행된다.
설치와 실행을 모두 마쳤다!
