참고 자료 (Reference)
- https://mujoco.readthedocs.io/en/stable/modeling.html#corientation
- https://chickencat-jjanga.tistory.com/44
문제점 (Trouble shooting): Penetration when retargeted
- 분석: 기존 character model의 테니스 모션을 내 연구에서 사용하는 캐릭터 모델에 리타게팅 했을 때, 테니스 라켓과 character의 body와 penetration 되는 문제점이 생겼다 !_! (아래 그림 참고)
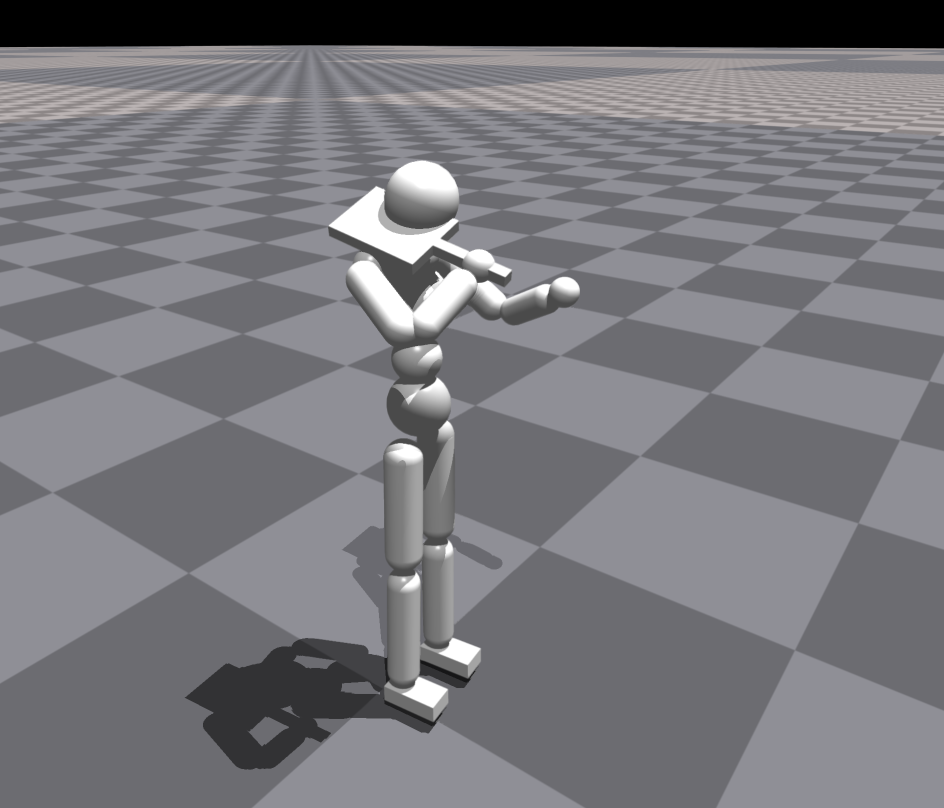
- 이유: 각 body의 길이가 차이가 나기 때문이라고 생각이 들었다.
- 해결해보려고 하는 점: right hand과 라켓의 각도가 90도를 이루며 잡혀있는데, 이 각도를 좀 높여봄. (손목 각도를 풀어서)
+) 손목이 너무 뻣뻣해보여서 보기 불편했는데, 실제 라켓을 잡은 것처럼 느껴지도록 조절해보았다..
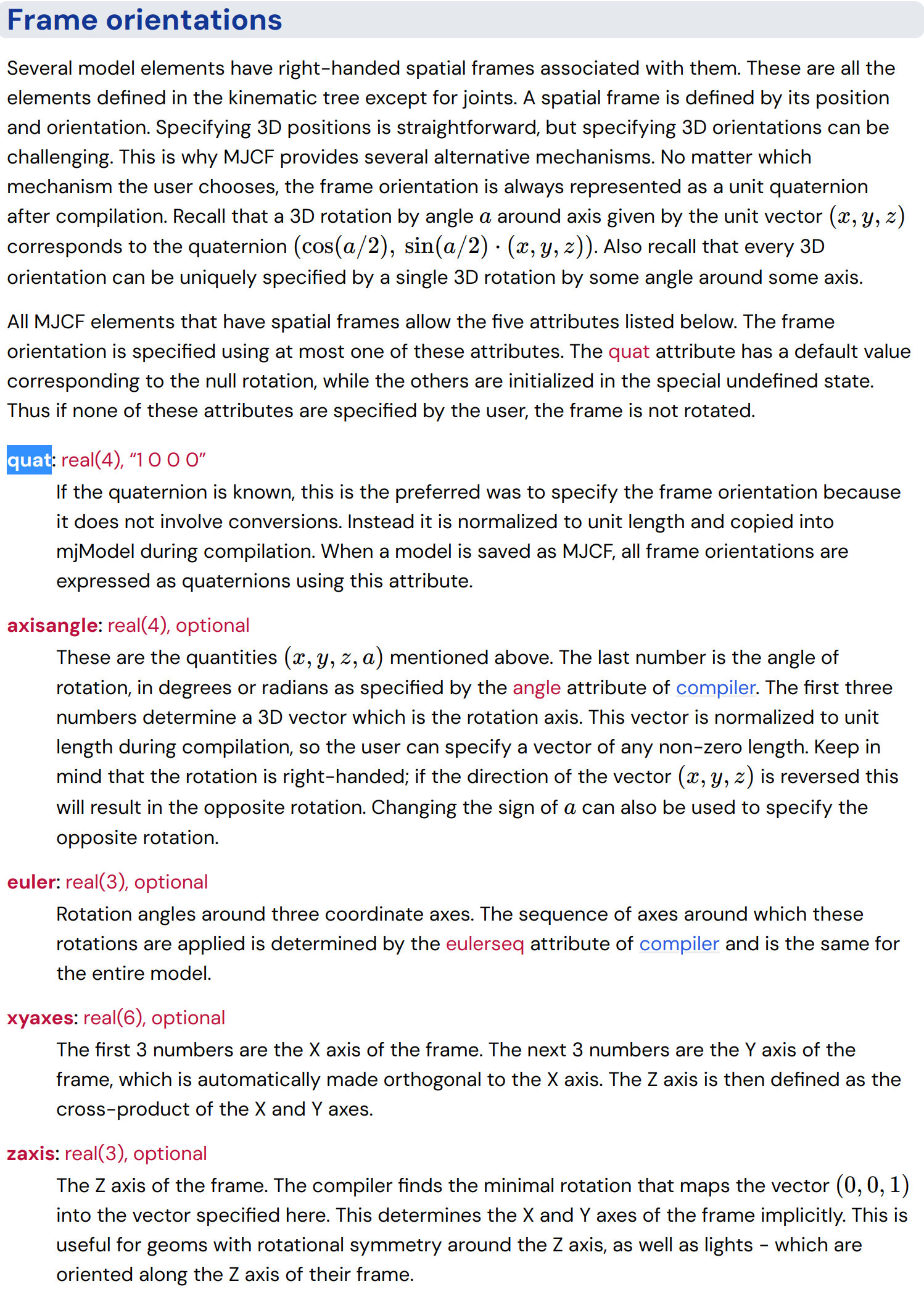
테니스 라켓에 Orientation 추가 (Change orientation of tennis racket)
- Configuration: racket_grip (geom) 과 racket (body)으로 구성되어있다.
[geom]과[body]모두 tag로 quat, axisangle, euler 등을 사용하여 orientation 값을 지정할 수 있다.
- 같은 orientation을 나타낼 수 있는 representation은 굉장히 다양한데, 나는quaternion을 사용하여 orientation을 지정해줌- 단 이 때 주의점은 orientation은 항상 local 이기 때문에 기준은 항상 parent body의 coordinate을 기준으로 구해야한다!
<geom name="racket_grip" type="box" pos="X Y Z" quat = "W X Y Z" size="X Y Z" density="DD"/>
<body name="racket" pos="X Y Z" quat = "W X Y Z">
<geom name="racket" type="box" pos="0 0 0" size="X/2 Y/2 Z/2" density="D"/>- 아래 그림은 mujoco documentation의 frame orientation 관련 설명
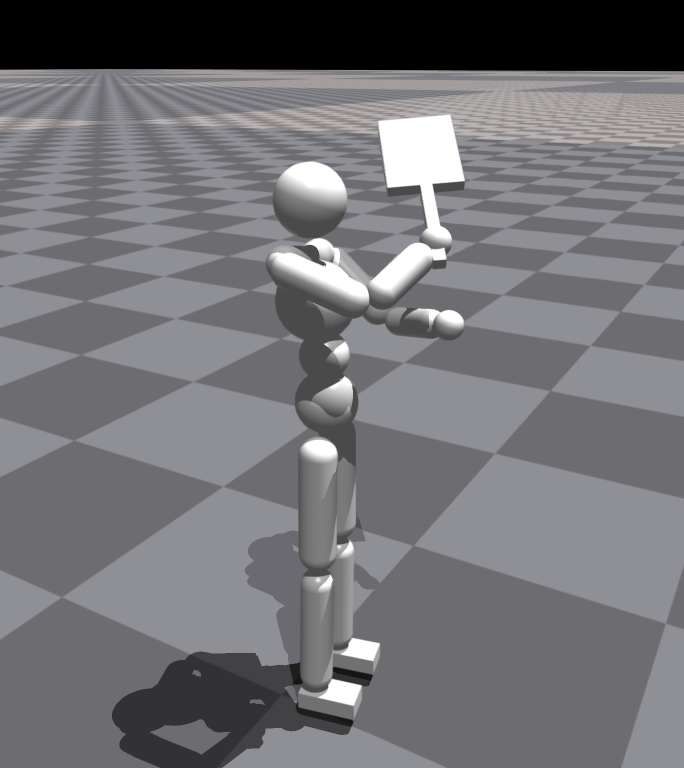
Visualization result
- penetration 문제도 완화가 되고 더 테니스를 치는 느낌이 난다,
Note
다시 학습을 시켜보자..!
