목적
- 3D 아바타와 가상 환경의 물체와 상호작용 구현
- 특히, 아바타가 blocking 동작을 하여 투사체가 아바타를 향해 발사될 때 팔로 막는 상호작용을 구현
참고 자료 (References)
- ASE: Large-Scale Reusable Adversarial Skill Embeddings for Physically Simulated Characters [Peng et al. SIGGRAPH 2022] 공식 Github
- isaacgym_preview4 examples code 중 projectiles.py
- 공식 홈페이지에서 다운로드 받으면 됩니다.
- 키보드 인풋나 마우스 인풋에 따라 해당 좌표에 projectile 던지는 예제
참고 자료 코드 분석 (Code Analysis)
- ASE와 Projectile를 분석한 결과 조금씩 다른 구성을 가지고 있었다. 아래는 중요한 부분에 대해 표로 정리한 것이다.
| ASE | projectile.py | |
|---|---|---|
| Simulation | GPU | CPU |
| envs 구성 | 같은 env 내에 humanoid와 projectile 추가 | projectile을 위한 env 따로 구성 |
| 발사 조건 | 발사 시간 지정 가능(_calc_perturb_times 함수) | keyboard input(space), mouse input |
| 발사체 구성 | small/large cube (총 2개) | cube with different colors (총 5개) |
(시도 1) 현재 코드에서 projectile.py 통합
키보드의 입력에 따라 물체를 발사하고 싶었기에 일단projectiles.py를 통합해 보았다.
Trouble shooting
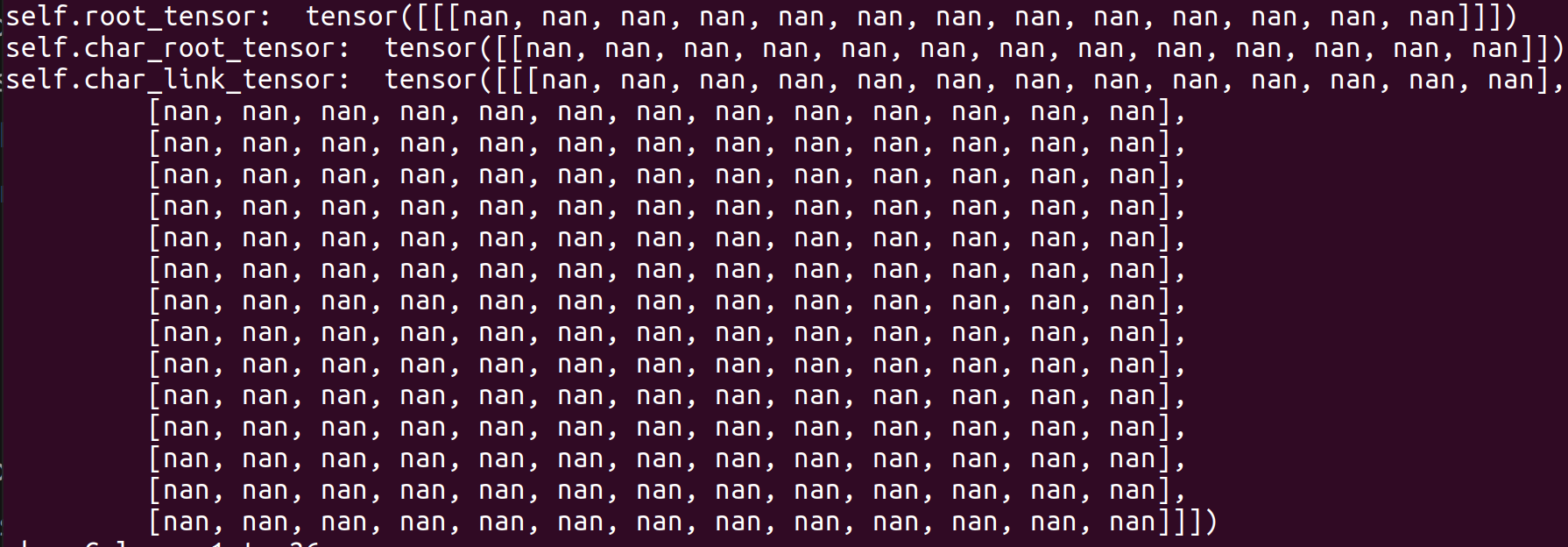
- Network가 예측하는 action 값들이 계속 변칙적으로 NaN 값을 return을 하였다.

What caused the problem?
- 최종적으로 action이 뽑히는 모든 값들 확인해보니, 관측하는 3D 아바타의 root, link와 관련된 state값들이 변칙적으로 NaN 값을 return하여서 계속 문제가 생겼다.
Where is the problem happening?
-
simulation의 state tensor값들을 refresh 해줄 때 에러가 났다.
-
문제가 된 함수
def refresh_tensors(self):
self.gym.refresh_dof_state_tensor(self.sim)
self.gym.refresh_actor_root_state_tensor(self.sim)
self.gym.refresh_rigid_body_state_tensor(self.sim)
self.gym.refresh_net_contact_force_tensor(self.sim)- 시뮬레이션되는 코드의 순서는 아래와 같다.
self.apply_actions(actions)
self.do_simulation()
self.refresh_tensors()-
self.apply_actions(actions): Policy에서 예측한 action (다음 포즈를 구성하는 dof_pd_target)을 아바타의 dof_state_tensor에 넣어준다. -
self.do_simulation(): 시뮬레이션 진행 -
self.refresh_tensors(): 시뮬레이션 진행한 후 아바타의 state 버퍼를 모두 갱신해준다. (root, link 등)
즉, 다음 시뮬레이션을 할 때, root, link의 버퍼가 가지고 있는 값이 NaN이기에 에러가 났던 것이다.
What's the solution then?
- (나의 추측) action을 뽑는 policy 및 다른 모델들은
GPU에서 연산을 하고, simulation 및 visualization은CPU에서 하는 중이었다. GPU에서 계산된 텐서값들을 `CPU로 옮겨서 처리하고 그 사이 과정에서 여러 연산들이 섞이면서 버퍼를 update하는 과정에 에러가 난 것으로 추정하였다.- 시간 효율을 위해 ASE를 참고하여 일단 모든 모델 연산과 Simulation을
GPU에서 처리해보기로 결정했다.
(시도 2) 현재 코드에서 humanoid_perturb.py 통합
- Simulation 및 모델 계산 등 모든 처리를
GPU에서 할 수 있도록humanoid_perturb.py를 통합해 보았다.
주의점
index 처리 조심: 같은 env에 3D avatar와 projectiles가 같이 들어가기 때문에 env에 존재하는 actor들의 root, link state_tensor들을 반환할 때 index 처리 조심
해결책
indexing을 통해 각 actor에 따른 다른 변수 선언: 3D 아바타의 state_tensor들 저장하는 tensor와 projectiles의 state_tensor를 저장하는 tensor에 대한 다른 변수를 선언하여 헷갈리지 않게 함.
############# 1. Root Tensor #############
# 모든 actor들에 대한 root_tensor 값 저장하는 변수
self._all_root_tensor = self.gym.acquire_actor_root_state_tensor(self.sim)
self._all_root_tensor = gymtorch.wrap_tensor(self._all_root_tensor)
# indexing을 통해 3D 아바타의 root 값에 대한 변수 선언
self.root_tensor = self._all_root_tensor.view(len(self.envs), -1, 13)[..., 0, :].unsqueeze(1) # [num_envs, 1, 13]
# indexing을 통해 projectiles의 root 값에 대한 변수 선언
self._proj_states = self._all_root_tensor.view(self.num_envs, num_actors, 13)[..., (num_actors - num_objs):, :] # [n_envs, num_objs, 13]
#######################################
############# 2. Link Tensor #############
# 모든 actor들에 대한 link_tensor 값 저장하는 변수
num_links = self.gym.get_env_rigid_body_count(self.envs[0])
self._all_link_tensor = self.gym.acquire_rigid_body_state_tensor(self.sim)
self._all_link_tensor = gymtorch.wrap_tensor(self._all_link_tensor)
#! indexing을 통해 3D 아바타의 link_tensors 값에 대한 변수 선언
# self.num_bodies가 3D 아바타의 총 link 수
self.link_tensor = self._all_link_tensor.view(len(self.envs), num_links, -1)[..., :self.num_bodies, :] # [num_envs, n_links, 13]
#######################################
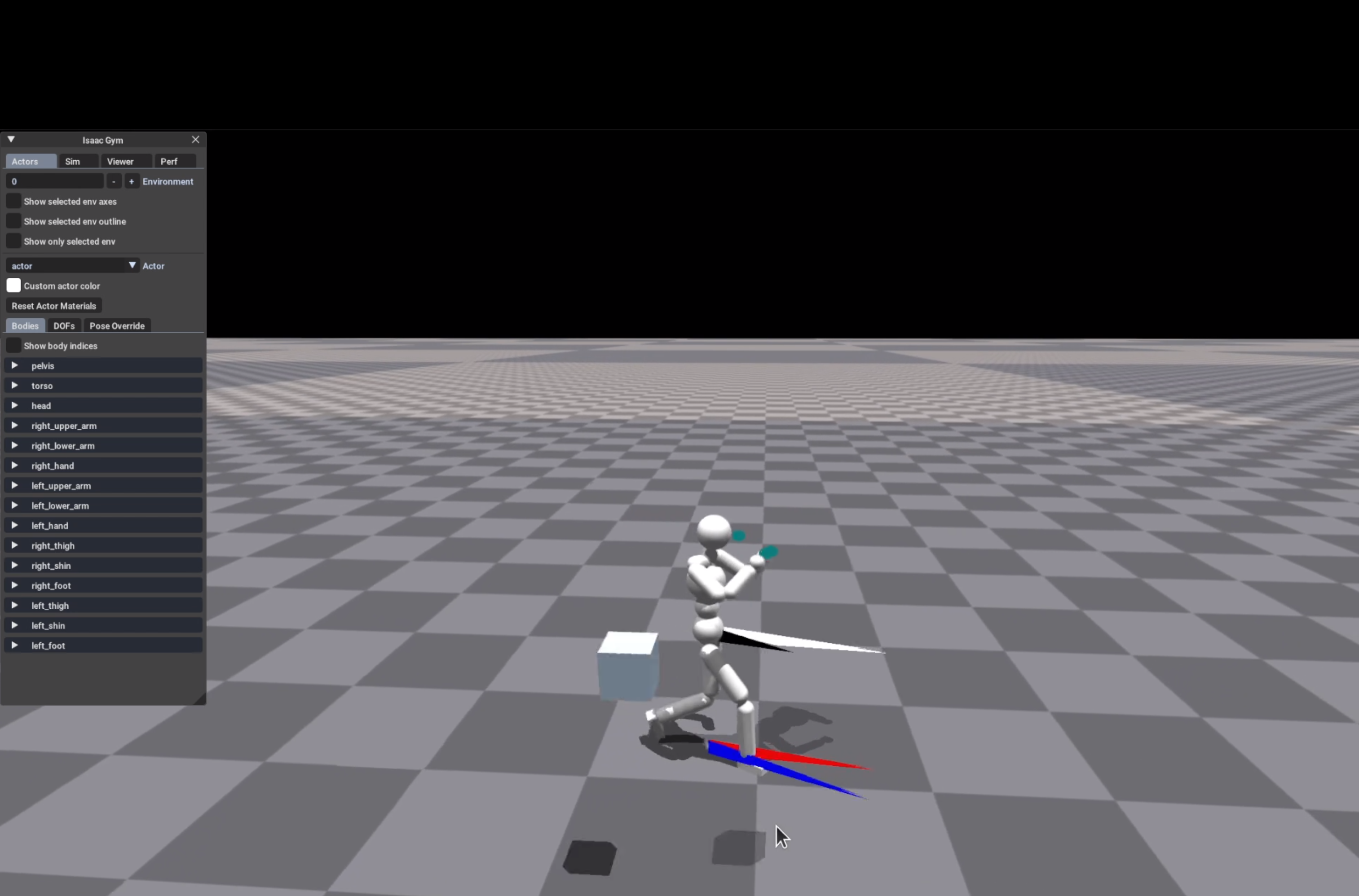
Visualization Result
- 일정 시간에 따라 Box가 humanoid에게 던져지도록 성공!
Next step to do
input에 따른 물체 발사
- 키보드 input에 따라서 box가 던져지도록 만들어보자!
- projectiles.py를 참고하면 될 것 같다.
- 이건 다음 포스팅에서 다루도록 하겠다.

좋은 자료 감사합니다!