해당 글은 개인적으로 공부하기 위한 글로 알아주시면 감사하겠습니다.
1.시스템 구조
개루프 시스템
- 개루프 시스템은 입력 명령을 제어하기에 적합한 형태로 변환하는 입력변환기(input transducer)라는 보조 시스템으로 시작함
- 입력은 기준입력(reference)로 칭하며 출력은 피제어 변수(controlled variable)라고 칭함
- 외란과 같은 신호는 입력되는 신호들을 대수적으로 합하는 접합점(summing junction)에서 제어기나 공정의 출력과 합해짐
- 질량이 움직일때 일정한 힘을 소모하는 제동기(damper)와 질량 및 스프링으로 구성되는 기계 시스템은 또 다른 개루프 시스템의 한 예임
- 개루프는 외란에 민감하여 외란을 제거하지 못하는 것이 단점
폐루프 시스템(feedback system)
- 입력 변환기는 입력 명령을 제어기에 적합한 형태로 변환시키며 출력변환기(output transducer) 또는 센서(sensor)로 출력을 측정하여 제어기에 적합한 형태로 변환
- 접합점으로 피드백 경로(feedback path)을 통하여 도달하는 출력 신호와 입력 신호를 대수적으로 합함
- 출력 신호의 부호가 반전되어 신호가 합해지는데 이를 구동신호(actuating signal)이라고 함
- 실제 입력과 출력의 차가 구동 신호가 되는데이를 오차(error) 라고 함
- 간단한 이득 조정을 하거나 제어기를 재설계함으로 써 과도 응답과 정상 상태 오차를 개선시키는것을 보상(compensating)이라고 함 재설계된 하드웨어를 보상기(compensator)라고 함
2. 해석과 설계 목적
과도 응답
- 과도 응답이 너무 빠르면 복구하지 못할 물리적 손상을 시스템에 입힐수 있음
정상상태 응답
안정도
- 과도 응답과 정상 상태 오차에 대한 해석과 설계는 시스템이 안정하지 않는 경우에는 의미가 없음
- 고유응답(natural response)과 강제응답(foreced responser)의 합으로 표시됨
- 이런 응답을 각각 동차해(homogeneous solution), 특이해(particular solution)이라함
- 선형시스템은 전체 응답의 다음과 같이 표현됨
사례연구
- 이런 진동하거나 정상 상태에서는 고유응답이 0으로 되어 강제응답만 남는 경우 불안정(instability)라고 함
- 감쇠진동(daped oscillation) : 시간에 따라 크기가 줄어드는 정현파 응답하는 과도 상태를 갖게 되는것
3. 설계 절차
1단계 : 요구조건에 맞는 실제 시스템 선정
- 요구 조건에 맞는 실제 시스템(physical system)을 선정함
2단계 : 기능별 블럭선도 작성
- 정상적으로 표현된 시스템의 각 부분을 기능별 블록선도로 나타내고 이를 블록들을 상호 연결하여 전체 블록선도를 완성함
3단계 : 구조 개요도 도안
- 예로 직류전동기(dc motor) 구동 시키기 위해 차동 증폭기(differential amplifier)와 전력 증폭기는 각각 이득이나 전력 증폭을 하는 제어기로 사용됨
- 부하(load)의 경우 회전하는 질량과 베어링 마찰을 가지므로 부하 모델은 자동차의 충격 흡수 장치나 스크린 문 제동기(screen door damper)와 같이 속도와 증가함에 따라 역회전 토크(torque)가 증가되는 관성(inertia)와 점성마찰(viscous damping)으로 표현됨
4단계 : 수학적 모델의 개발
- 시스템 구조에 대한 개요도가 완성되면 전기 회로에 kirchhoff의 법칙과 실제 시스템에 대해 적용되는 Newton의 법칙과 같은 물리적 법칙과 가정을 이용하여 시스템을 모델링함
- kirchhoff의 전압 / 전류 법칙, newton의 법칙을 이용하면서 동적 시스템의 입력과 출력 사이의 관계를 나타내는 수학적 모델링을 얻을수 있음
- 선형 시불변 미분방정식(linear time-invariant differential equation)으로 표시됨
- 시스템 모델은 차수가 높아지거나 비선형 시변(nonlinear time varying) 또는 편미분 방정식(partial differential equation)으로 표현됨
- 전달함수(transfer function)은 시스템을 수학적으로 모델링하는 방법으로 전달함수를 laplace변환을 이용하여 선형 시불변 미분방정식으로 유도됨
- 상태공간(state space)에서도 시스템 모델이 표현될수 있음 이는 모델을 상태 공간에서 표현하려는 이유는 선형 미분 방정식으로 나타낼수 없는 시스템에서도 적용할수 있을 뿐만 아니라 시뮬레이션하기 편한 형태로 나타낼수 있기 때문
5단계 : 블럭선도 단순화
6단계 : 해석과 설계
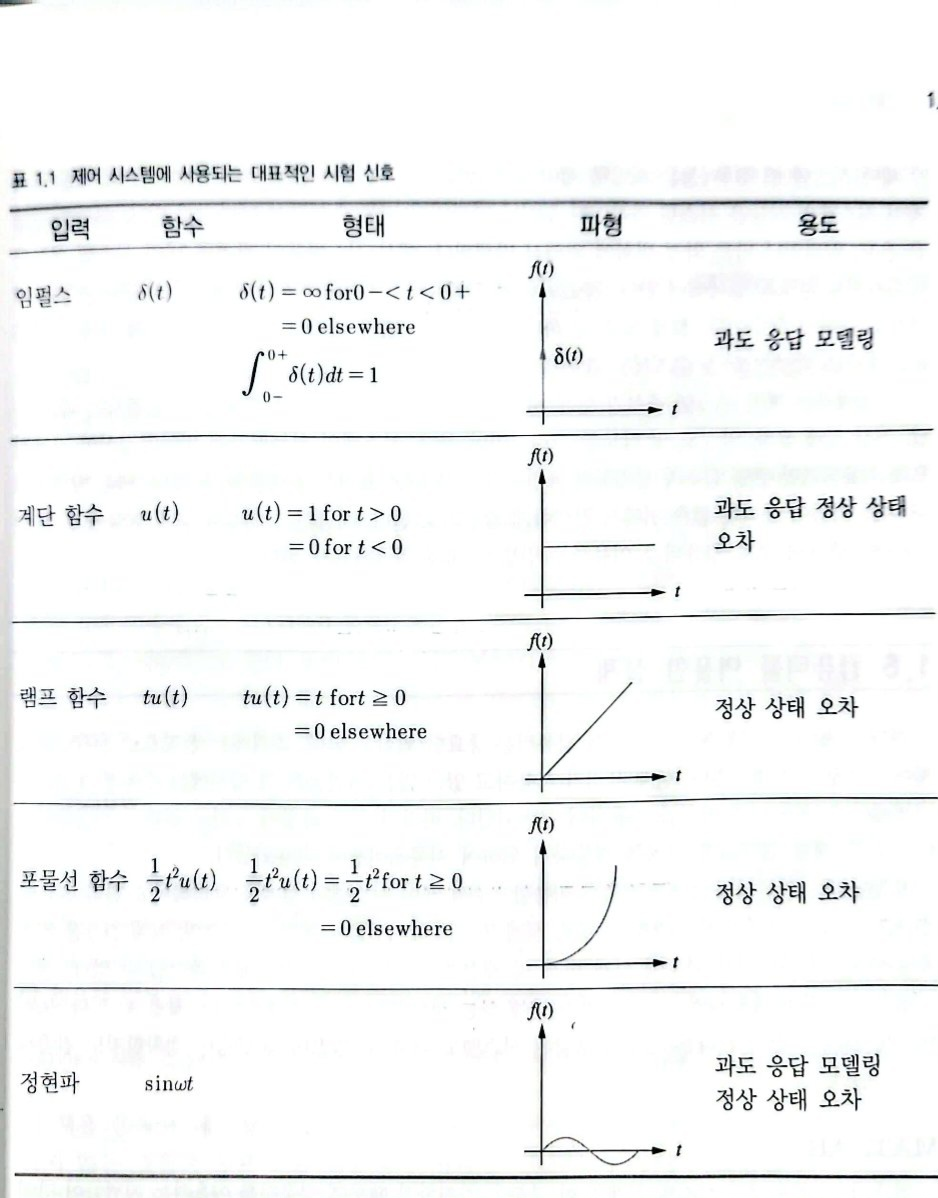
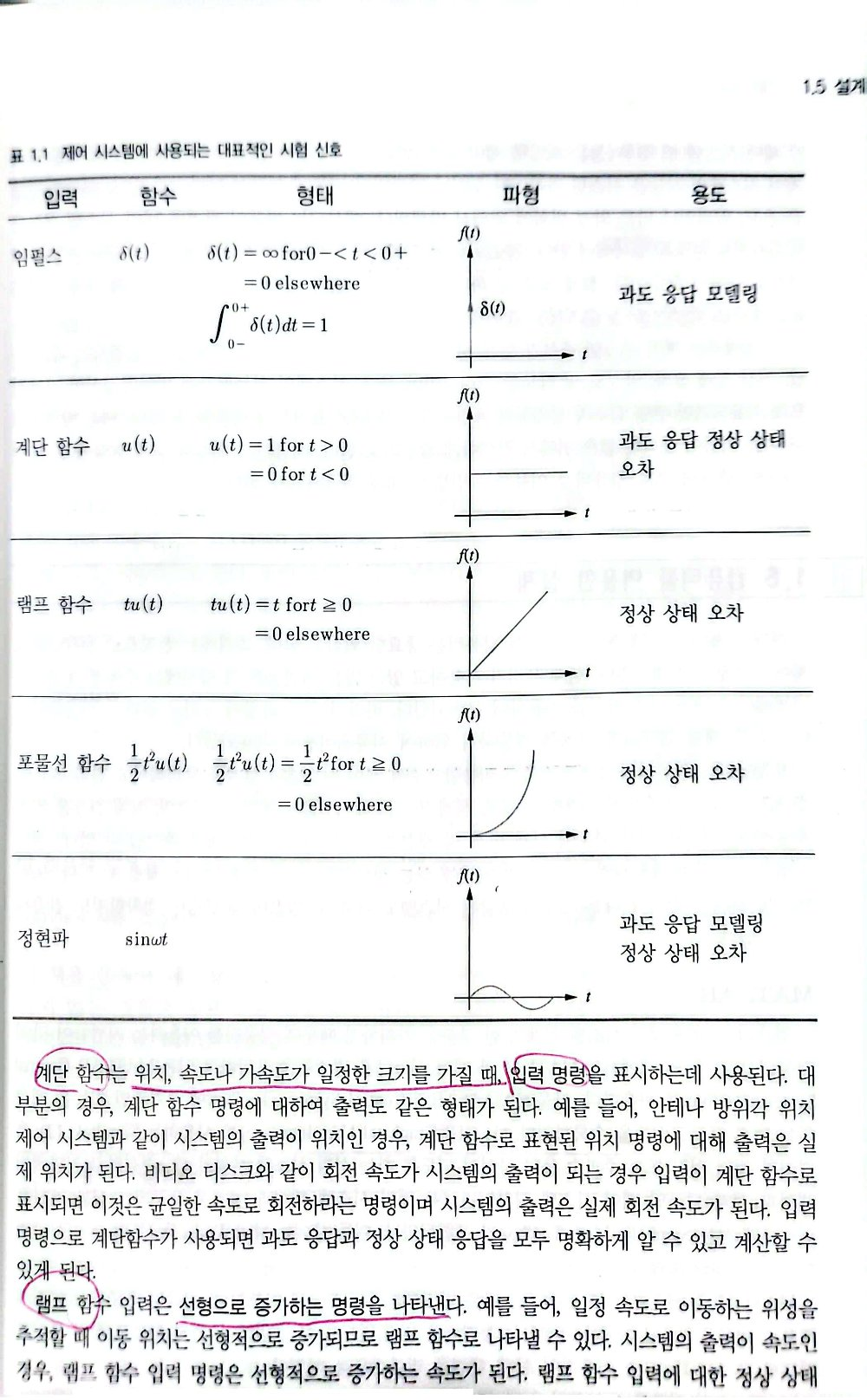
- 계단 함수 : 위치 속도나 가속도가 일정한 크기를 가질때 입력 명령을 표시하는데 사용됨
- 램프 함수 입력 : 선형으로 증가하는 명령을 나타냄
- 정현파 입력 : 시스템에 대한 수학적 모델을 유도하기 위하여 실제 시스템을 시험하는데 이용됨
감도(sensitivity) : 시스템 파라미터 변동에 대한 성능 변동을 퍼센트로
english version
1. System Architecture
1.1 Open-Loop Systems
An open-loop control system operates without feedback.
- The system begins with an input transducer, which converts the command into a form suitable for the controller/plant.
- The input signal is called the reference input.
- The output is referred to as the controlled variable.
- Disturbances may enter at a summing junction, where signals are algebraically combined.
Example: A mechanical system composed of a mass, spring, and damper.
- A damper dissipates energy (typically proportional to velocity).
Limitation:
Open-loop systems are sensitive to disturbances and cannot automatically correct for unexpected variations, leading to degraded accuracy and robustness.
1.2 Closed-Loop Systems (Feedback Systems)
A closed-loop system uses feedback to reduce error and improve robustness.
- The input transducer converts the reference command for the controller.
- A sensor (output transducer) measures the output and converts it into a comparable signal form.
- The measured output returns through the feedback path to the summing junction.
The error (actuating signal) is:
where:
- : reference input
- : output
- : error (actuating signal)
Compensation
Improving transient response or steady-state error by gain adjustment or controller redesign is called compensation.
The redesigned element is called a compensator.
2. Objectives of Analysis and Design
Control design typically focuses on:
- Transient response
- Steady-state response
- Stability
2.1 Transient Response
Transient response describes system behavior before reaching steady state.
Key measures include:
- rise time
- peak time
- overshoot
- settling time
Engineering note: An excessively fast transient can cause actuator saturation or physical damage in real systems.
2.2 Steady-State Response
Steady-state response describes long-term behavior after transients decay.
A key metric is the steady-state error, which depends on:
- system type
- input class (step, ramp, etc.)
2.3 Stability
If the system is unstable, transient and steady-state specifications are meaningless.
For an LTI system:
- Natural response = homogeneous solution
- Forced response = particular solution
For a stable system:
Damped Oscillation
A damped oscillation is a transient sinusoidal response whose amplitude decreases over time due to dissipation.
3. Design Procedure
Step 1: Select the Physical System
Select a physical system that satisfies the given performance requirements, constraints, and operating conditions.
Step 2: Build the Functional Block Diagram
Represent each subsystem as a functional block and interconnect them to describe overall signal flow.
Step 3: Draw the Structural Schematic
Example: DC motor drive system
- differential amplifier: gain control
- power amplifier: power amplification
- load: inertia + viscous damping
A common load model:
where:
- : inertia
- : viscous damping
- : angular velocity
Step 4: Develop the Mathematical Model
Use physical laws:
- Kirchhoff’s Voltage/Current Laws (electrical)
- Newton’s Second Law (mechanical)
Typical result: an LTI differential equation relating input and output.
Transfer Function
Applying Laplace transform:
State-Space Model
State equation:
Output equation:
Why state-space?
- supports MIMO
- handles nonlinear extensions
- convenient for simulation
- foundation of modern control
Step 5: Block Diagram Reduction
Simplify interconnected blocks using algebraic reduction rules to obtain the overall system form.
Step 6: Analysis and Controller Design
Design the controller to satisfy:
- stability
- transient performance
- steady-state accuracy
- robustness
4. Standard Test Inputs
- Step input: represents a sudden command (often used in position control evaluation)
- Ramp input: represents a linearly increasing command (useful for tracking analysis)
- Sinusoidal input: used for frequency-response testing and system identification
5. Sensitivity
Sensitivity measures performance variation due to parameter changes:
Low sensitivity implies strong robustness to modeling uncertainty and component tolerances.
6. Core Design Balance
Control design fundamentally balances:
- Stability
- Performance
- Robustness
