평균필터란 N개의 샘플이 있다고하면 N개를 모두 더하고 N으로 나누는 것을 의미하여 평균값을 사용하여 신호를 안정화하는 원리임 -> 가장 기본적이고 직관적인 신호처리 기법
해당 결과에서 사용한 것은
alpha = (k-1) / k
상단 공식은 평균의 가중치를 결정시킴 -> k가 늘어나면 과거데이터에 영향이 커짐
avg = alpha x preavg + (1-alpha)*x;
전에 있던 값에 가중치 값을 곱하고 나머지 가중치 값을 다음 들어오는 값에 가중치를 메김
여기서 볼수 있는 것은 가중치 값은 alpha와 1- alpha로 가중치 분배 진행
main.m
dt = 1; % 시간 간격 1초로 지정
t = 0:dt:100; %state:step:end
Nsamples = length(t); %length -> 전체 길이로 0~100까지로 101값
avgsaved = zeros(Nsamples, 1); %101*1 크기로 열 벡터를 미리 0으로 초기화
xmsaved = zeros(Nsamples, 1); %101*1 크기로 열 벡터를 미리 0으로 초기화
for k=1:Nsamples %K ~ 101까지 반복
xm = getvolt(); %전압값을 가지고 오는 함수로 입력ㄱ밧으로 생각
avg = avgfilter(xm); %전압값을 가지고 오는것
avgsaved(k) = avg;
xmsaved(k) = xm;
end
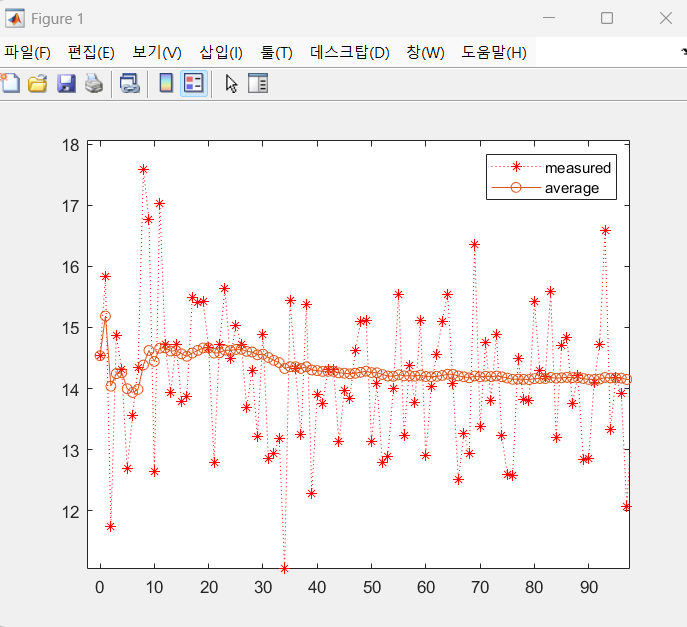
figure
plot(t, xmsaved, 'r:*')
hold on
plot(t, avgsaved, 'o-')
legend('measured', 'average')
getvolt.m
function z = getvolt()
w = 0 + randn(1,1); %평균 0 과 표준편차 1를 난수 1개 생성
z = 14+w; %약 14V로 잡음```
avgfilter.m
function avg = avgfilter(x)
persistent preavg k
%영속변수를 만듬-> 영속변수란 함수가 여러번 호출되도 값이 유지됨
% 여기서는 preavg -> 이전평균값, k -> 입력된 데이터의 개수
persistent firstrun
if isempty(firstrun)
k = 1;
preavg = 0;
firstrun = 1;
end
alpha = (k-1)/k; %평균의 가중치를 결정시킴 -> k가 늘어나면 과거데이터에 영향이 커짐
avg = alpha * preavg + (1-alpha)*x;
% alpha * preavg : 이전 평균값의 영향을 끼침
% (1-alpha)*x
preavg = avg;
k = k+1;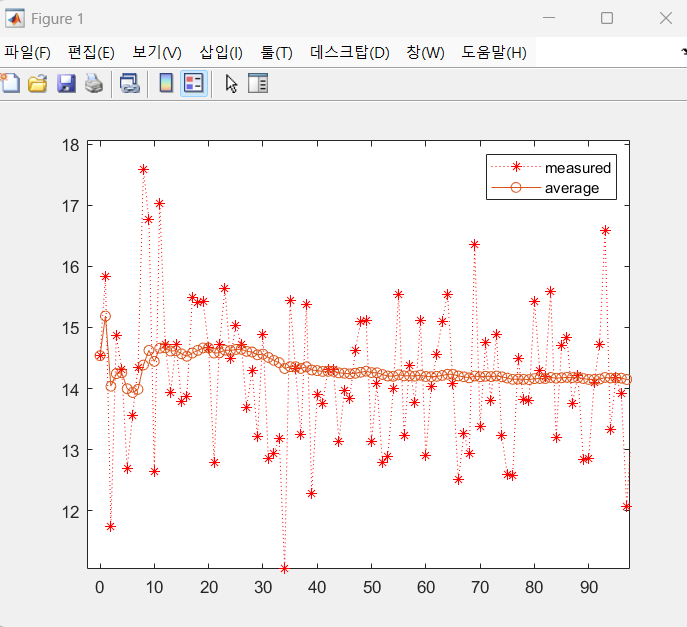
참조

#자기공부 #틀린것도많음 #자기개발 여러분 인생이 힘들다 하더라도 그것을 깨는 순간 큰 희열감으로 옵니다~