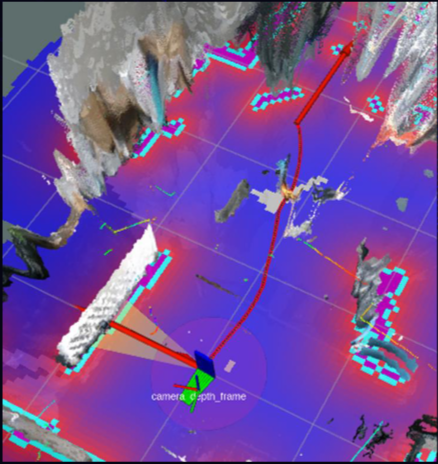
해당 라이더와 3d 뎁스카메라와의 캘리브레이션을 진행하기 위해 Solve PNP로 카메라의 translation과 rotation을 구현하는 과정입니다
먼저 translation과 rotation이란
translation : 카메라가 3차원 공간에서 이동하는 이동량을 의미함
rotation : 카메라가 3차원 공간에서 회전한 값을 의미
카메라와 라이더를 활용하여 추출해야하는 정보
1. 카메라
- 2차원 이미지 상의 점
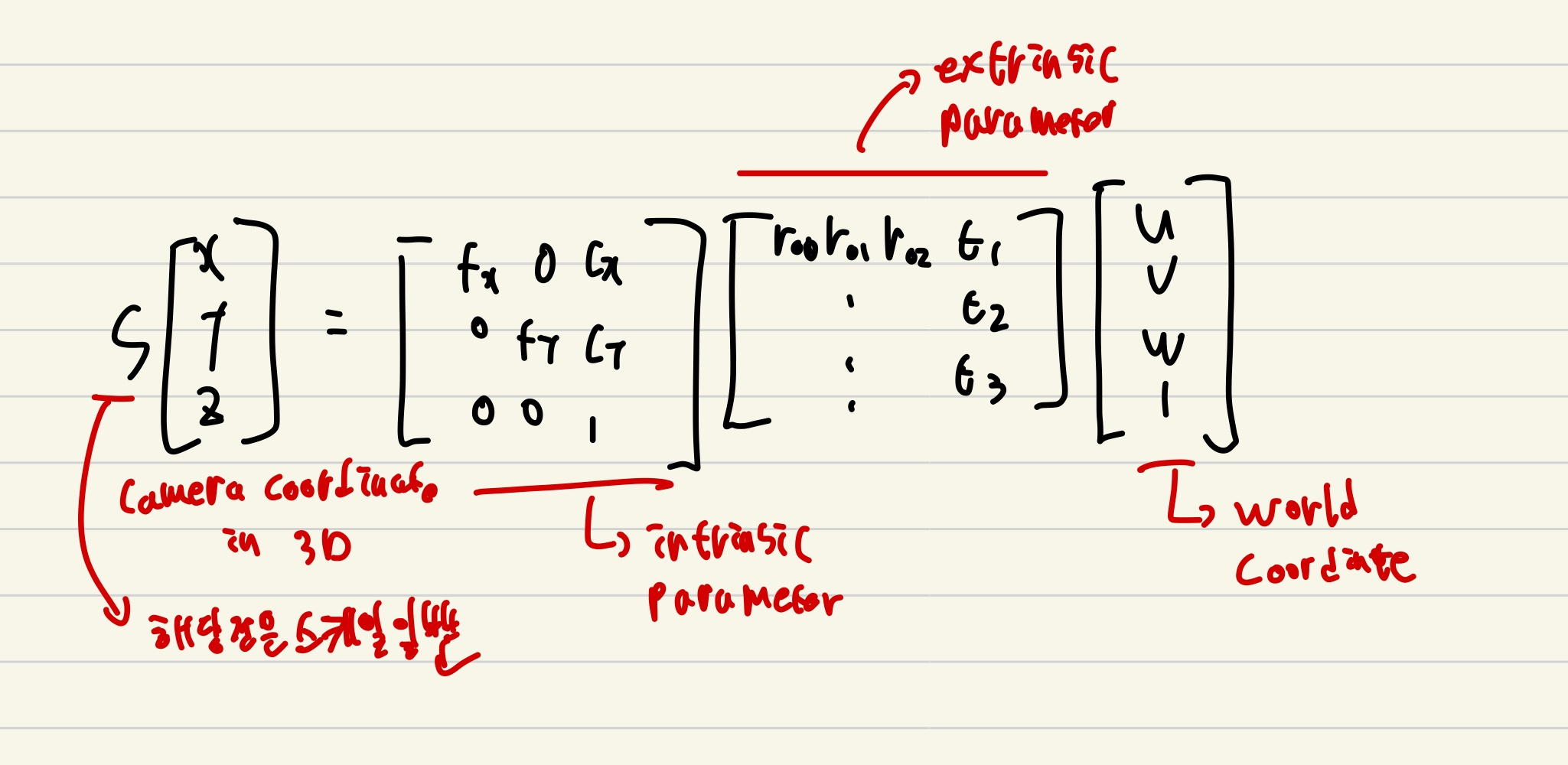
- camera coordinate : 3차원 상에서 카메라 중심을 원점으로 물체의 좌표를 표현하는것
1-1. Intrinsic parameters
-
Focal length of camera(카메라의 초점거리), optimal center in the image(이미지의 최적 중심), radial distortion parameters(방사형 왜곡 매개변수)를 원소로 하는 행렬
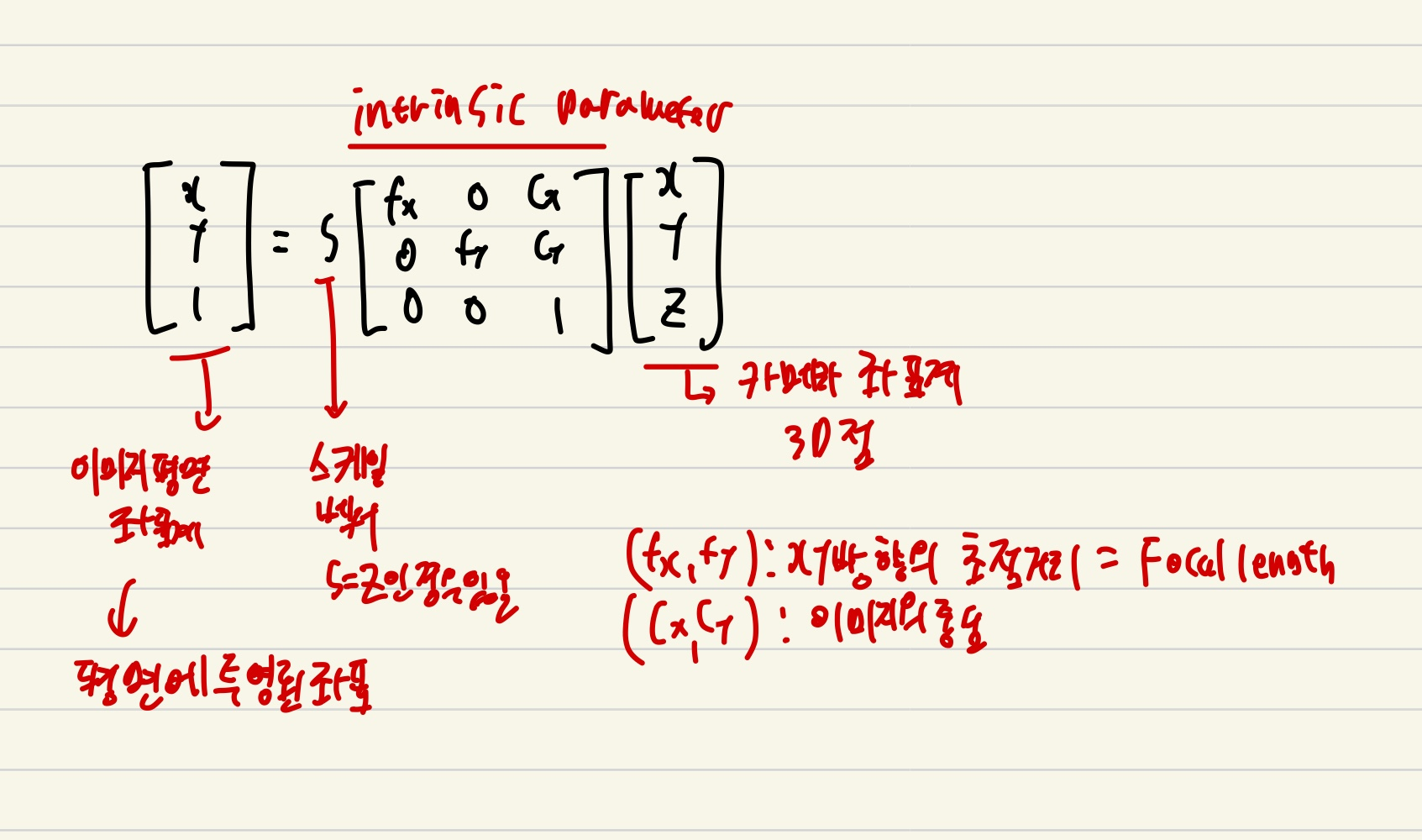
-
camera coordinate 좌표에 intrinsic parameter를 곱하면 Image coordintes 좌표를 구할수 있음
2. 라이더
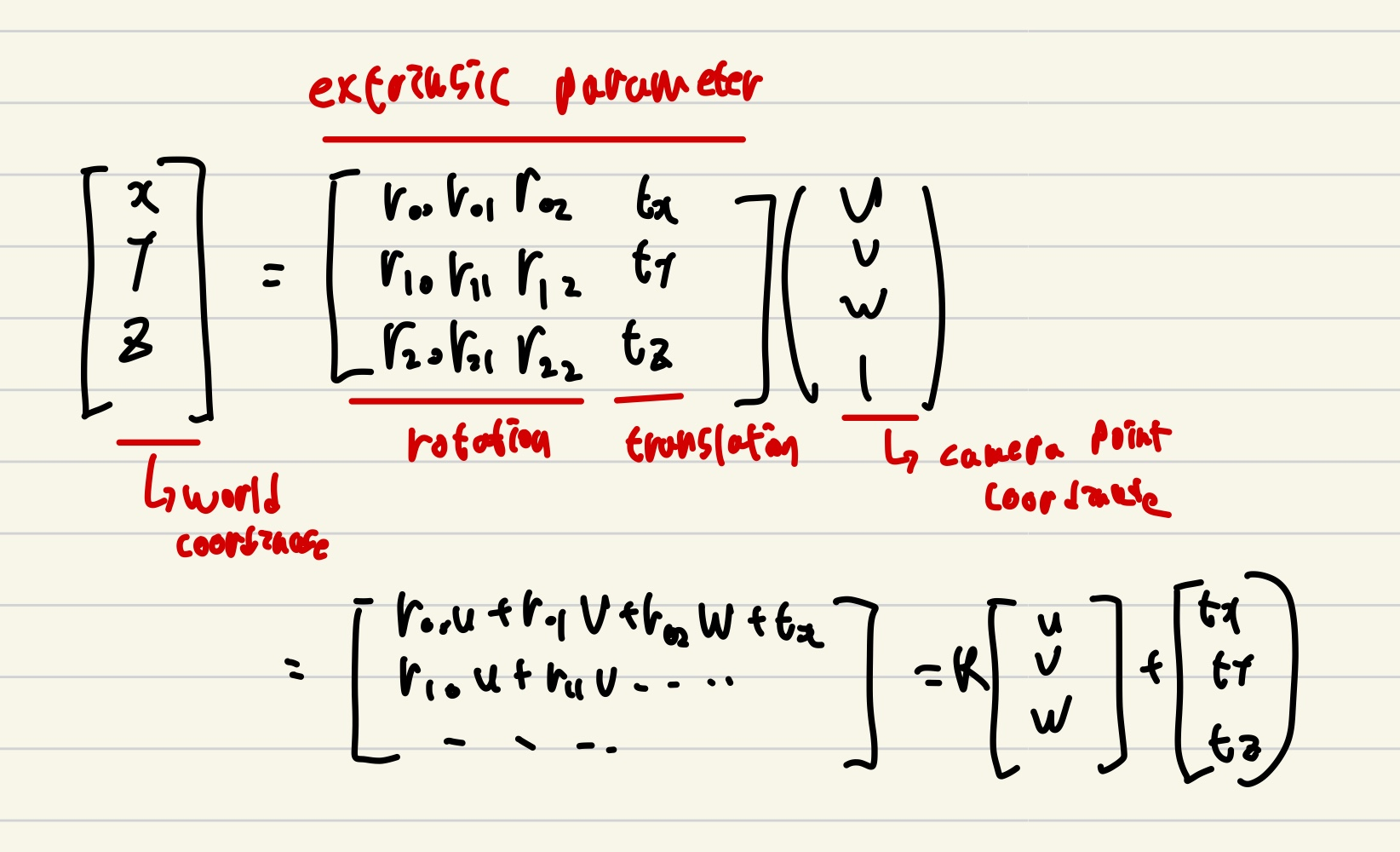
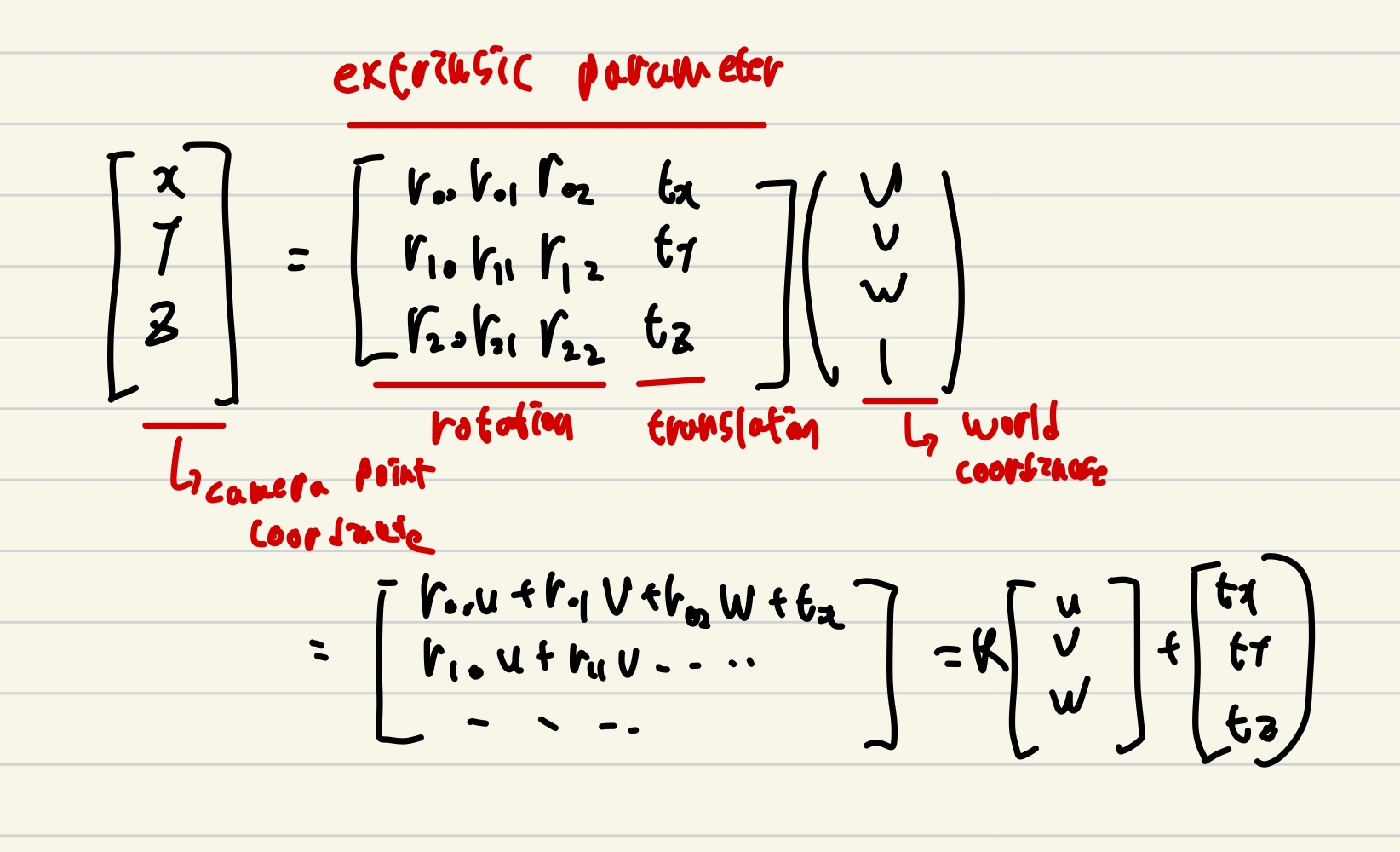
- world coordinate : 3차원 상에서 특정한 점을 원점으로 삼아 물체를 좌표로 표현하는 좌표계
world coordinat과 camera coordinated로 extrainsic parameter 관계
solve PnP
- 카메라의 평면 좌표(x,y)와 world coordinate(U, V, W), camera intrinsic parameter을 통해 tranlation과 rotation을 추정하는것 값을 구하기 위해 사용되는것
- 해당 값들을 input으로 가짐
- 3D 점 : Lidar를 활용해서 구함
- 2D 점 : 카메라 이미지 좌표계를 통해구함
- 카메라 내부 파라미터 : Opencv로 해당 환꼉에 특징점을 활용하여 구함
- output(외부파라미터 구함)
- rotation vector
- translation vector
- 수식으로 표현
https://www.youtube.com/watch?v=tDfAbqQQO0o&list=PLoJdZ7VvEiRNUxlIXlgy7Fh8ziyt4Hw50&index=3

#자기공부 #틀린것도많음 #자기개발 여러분 인생이 힘들다 하더라도 그것을 깨는 순간 큰 희열감으로 옵니다~