제가 작성하는 이 글은 제가 공부하기 위해 작성하고 제 학교 후배들에게 조금이라도 ros에 대해서 접하게 하고자 작성하게 되었습니다. 그러니 만약 틀린내용이나 그러니 제가 부족한 부분이 있을수 있으니 주의해주면서 봐주시면 감사하겠습니다 -Happy Lee-

ROS2 HUMBLE
ROS는 하나의 운영체제로 로봇 시스템을 설계하고 제어하는데 중요하다. ROS2는 로봇 애플리케이션을 개발하는데 사용되는 오픈 소스 소프트웨어 프레임워크로 복잡한 로봇 작업분리하여 편하게 관리를 해주고 상호작용도 쉽게 할수 있다.
ROS2 humble은 우분투 22.04로 활용하는것이 좋습니다.
우분투 환경같은경우
듀얼부팅(컴퓨터에 리녹스환경과 윈도우환경)
난이도 ☆☆☆(윈도우 것들이 다 날라갈수 있음)
WSL2
난이도 ☆(opencv가 안되는거 같음)
https://m.blog.naver.com/dychoe80/222953585086
윈도우 밀고 우분투 설치
난이도 ☆☆(우분투 노트북 한대를 만든다고 생각) 이거는 20.04임
상단에 있는방법들이 있다는것으로 링크를 넣은거지 이거 따라하지말고 직접찾아서 다운받으세요.
다음 우분투 환경이 된거 같으면 이제 humble을 다운 받으세요
(기초적인 우분투 환경에서 다운받고 하는거는 이 블로그에서 안함 여기서는 그냥 ros humble에 대한 공부를 하는거임)
https://docs.ros.org/en/humble/Installation/Alternatives/Ubuntu-Development-Setup.html
우분투 22.04에서 하는거고 진짜 위에서 부터 차근차근 번역하면서 다운받으면 오류 안나오니까 차근 차근 다운 받아서 하고 하단에 talker와 listener가 될때까지 하세요.
여기서 자기 다른 우분투 다운받았다 mac껄로 했다 어떻게 하냐 오류나온다 어떻게 하냐 하면 다시 우분투 부터 다 삭제하고 다운 받고 차근차근하세요.
이걸로 우분투 환경에 ros2 humble을 다운받았다고 생각하겠습니다.
ros2 humble로 할수 있는활동
RQT
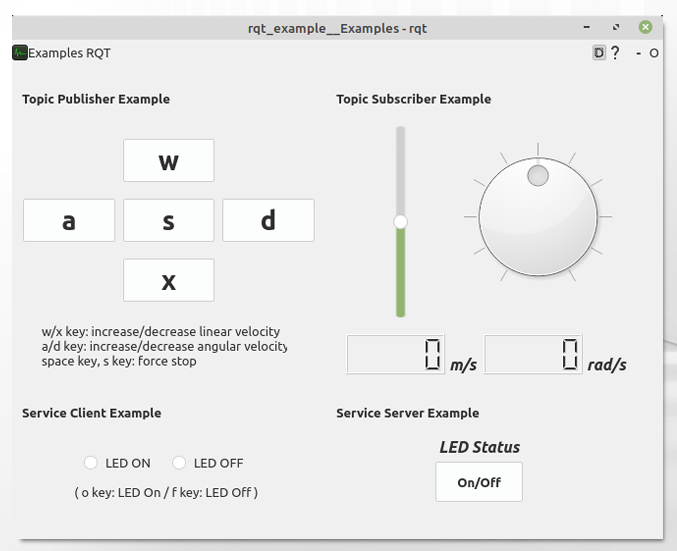
- ROS 2 기반의 GUI 도구 모음
- 플러그인 방식으로 설계되어 다양한 ROS 2 데이터 시각화, 디버깅, 제어를 가능하게 함
RViz
- 로봇의 센서 데이터 및 상태를 실시간으로 3D 환경에서 시각화
- 센서 데이터(라이다, 카메라), 로봇 모델, 경로 계획 등을 시각적으로 확인 가능
Gazebo

- 로봇 시뮬레이션을 위한 3D 물리 엔진.
- 로봇과 환경 상호작용을 물리적 규칙에 따라 시뮬레이션.
MoveIt
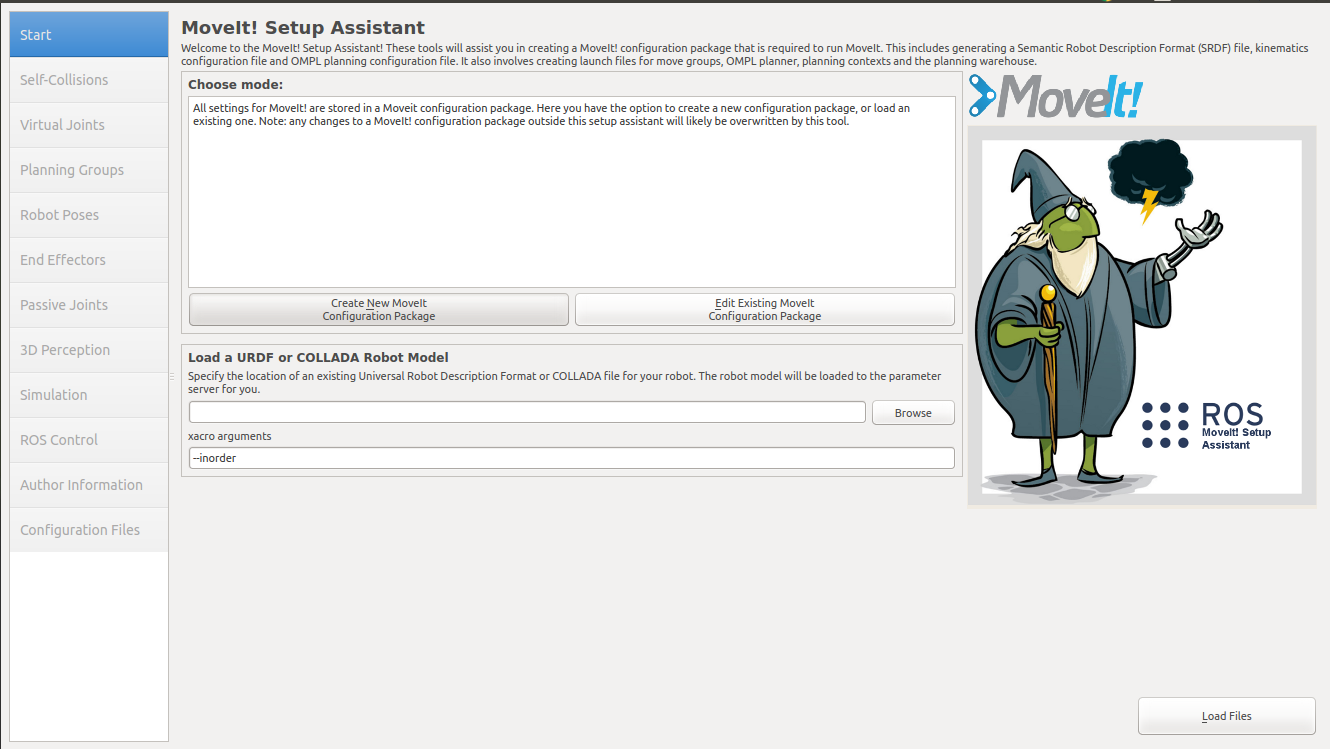
- 로봇의 팔(Manipulator)을 위한 모션 플래닝, 제어, 시뮬레이션 툴
- ROS 2에서 로봇의 End-Effector 제어와 경로 계획을 수행
Groot
- Behavior Tree를 설계, 시각화, 디버깅하는 데 사용되는 GUI 기반 도구
- Behavior Tree는 로봇의 의사결정 및 행동 계획을 모델링하는 구조로, 복잡한 작업을 모듈화하고, 상태와 행동을 관리하는 데 사용됨
