회전행렬
강체의 위치는 고정 좌표계로 O-xyz에 대해서
P0 = [Pox Poy Poz]^T
강체의 방향각은 오일러, roll pitch yaw를 통해 수학적 계산 가능
회전된 강체의 경우 O'-x'y'z' 회전된 강체에 부착된 좌표계
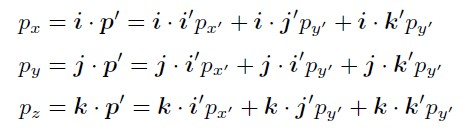
p = pxi + pyj + pzk
p' = px'i' + py'j' + pz'k'
여기서 ijk같은경우 단위벡터로써 현재 p는 위치를 아는것이다.
이런 강체를 회전행렬로 알수 있다.
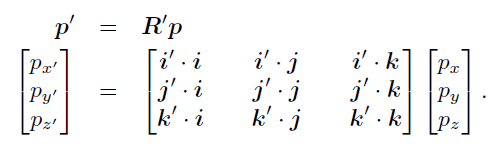
p = Rp'
이로인해
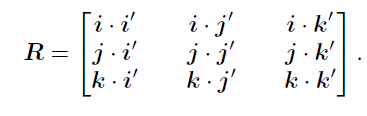
R을 구할수 있고
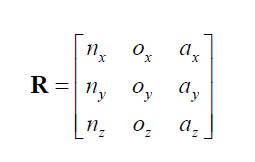

여기서 하단에 결과가 나오면
1. 수직의 조건 
2. 외적의 관계

3. 벡터 크기 적인 부분

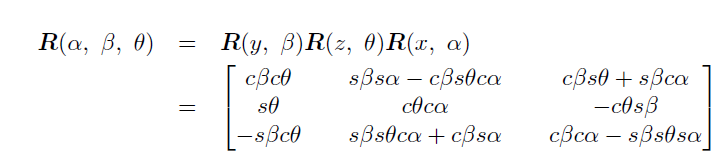
그래서 결과적으로
R(y,β)⋅[R(z,θ)⋅R(x,α)]
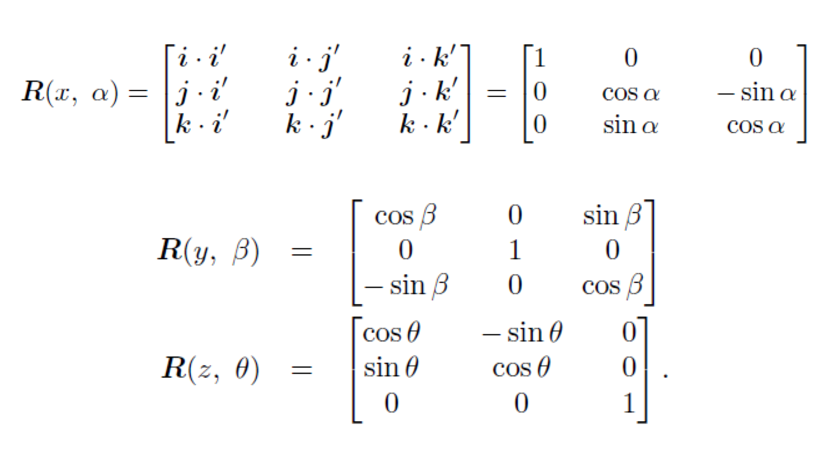
해서
오일로각도
3차원 공간에서 강체가 놓인 자세를 표현하기 위해 나타내는 3개의 각도를 뜻한다
제생각을 정리하자면 그것은 여러 축마다의 회전행렬을 곱해서 결과적으로 최종적으로 고정된 좌표값의 기준이 아닌 회전된것에 계속 씌우면서 회전행렬을 진행하여 최종 고정된 축에서 회전된 축까지 가는 방법의 회전행렬을 구하는 것으로 해석된다.
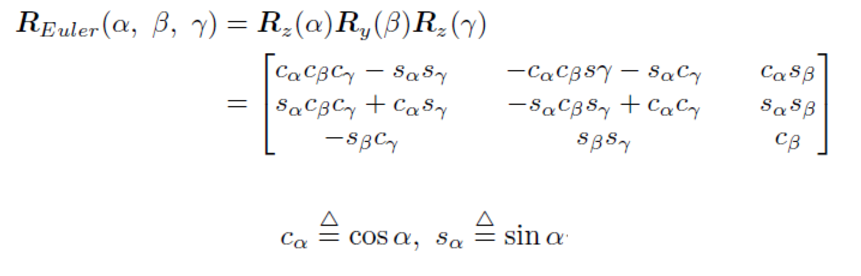
지금 그래서 위같은경우 Z,Y,Z이렇게 움직인 것이다.
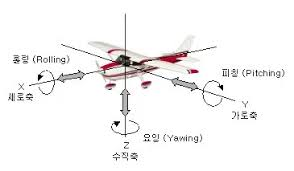
롤-피치-요 각도
roll은 x축 중심으로 회전
pich는 y축 중심으로 회전
Yaw는 z축 중심으로 회전
쿼터니언 방향각
쿼터니언은 3차원 회전및 방향에서 네게 부분으로 구성된 초복소수로써 이것도 회전행렬을 구할수 있다
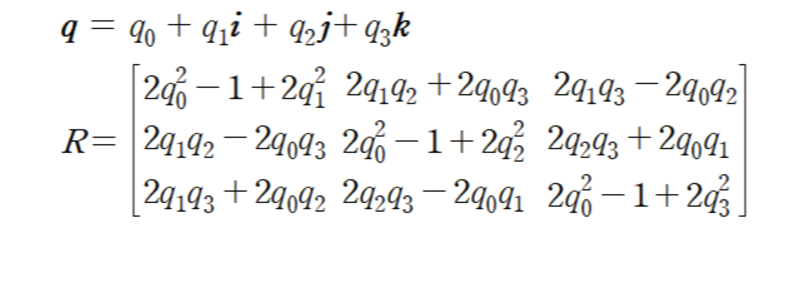
여기서 q0은 스칼라 요소이고
아거는 벡터요소다 (ㅌ1=q1, ㅌ2 = q2.....)
출처
https://ddangeun.tistory.com/25
https://namu.wiki/w/%ED%95%AD%EA%B3%B5%EA%B8%B0%EC%9D%98%20%EA%B8%B0%EB%B3%B8%203%EC%B6%95
