manipulator
1.Rigid body math
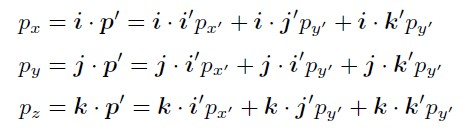
강체의 위치는 고정 좌표계로 O-xyz에 대해서 강체의 방향각은 오일러, roll pitch yaw를 통해 수학적 계산 가능회전된 강체의 경우 O'-x'y'z' 회전된 강체에 부착된 좌표계여기서 ijk같은경우 단위벡터로써 현재 p는 위치를 아는것이다.이런 강체를 회전행
2024년 11월 30일
2.프로젝트 URDF 제작
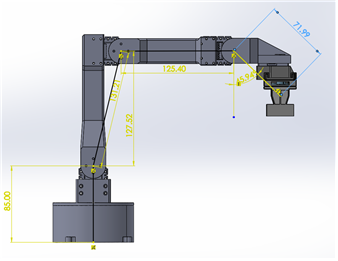
이번 블로그는 현재 진행하는 프로젝트에 사용되는 로봇팔을 제작하기위해 urdf을 직육면체를 활용해서 기다 디자인을 구사하였다.로봇팔은 다이나믹셀 AX-12A로 구현하였고 openmanipulator-x의 외형을 모티브 삼아 제작하였다.하단 urdf 파일에 대한 설명이
2024년 12월 1일