이진화
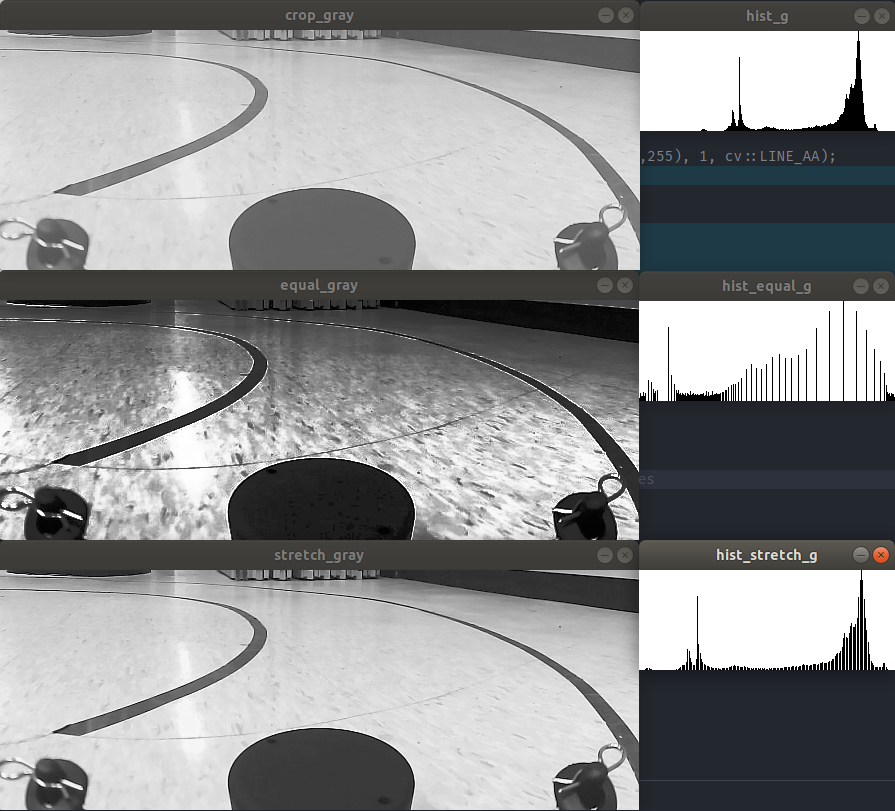
gray scale
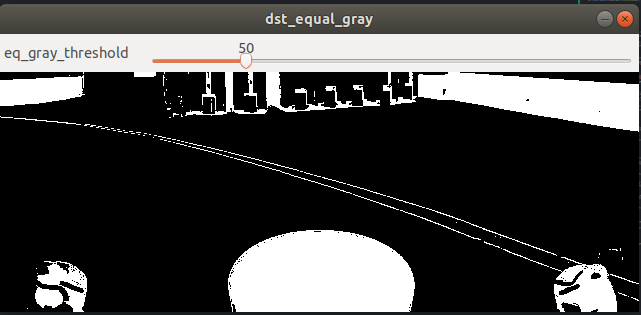
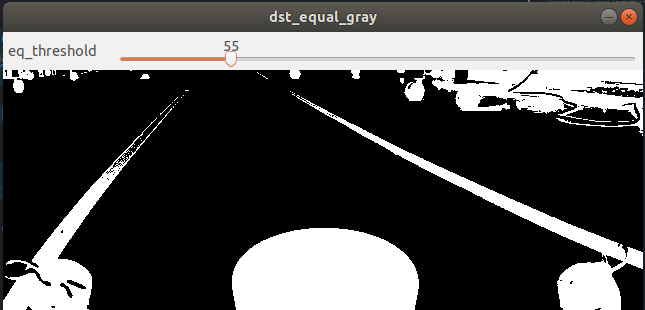
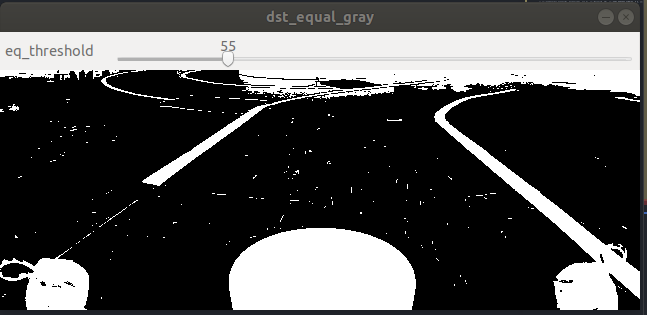
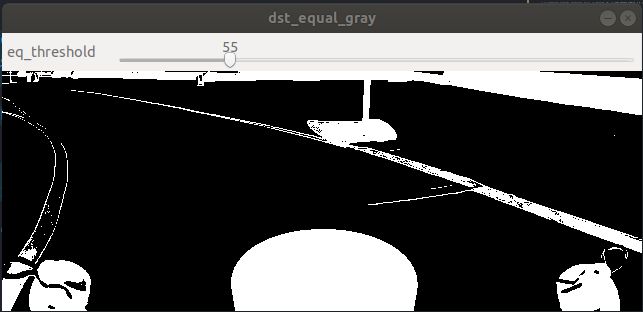
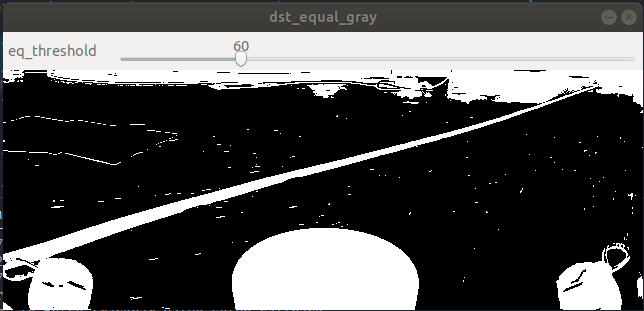
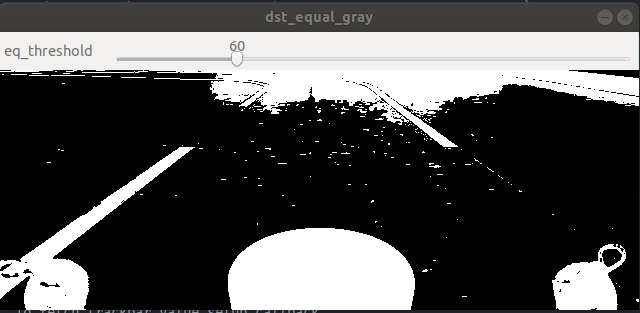
gray_eqaulize
- avg_time: 0.980676ms
50
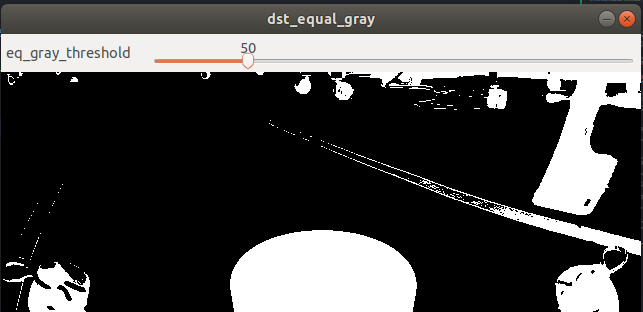
55
60
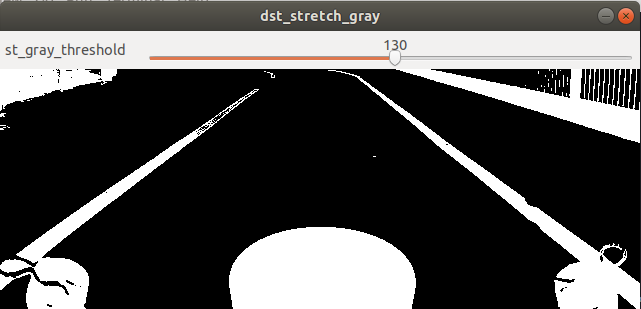
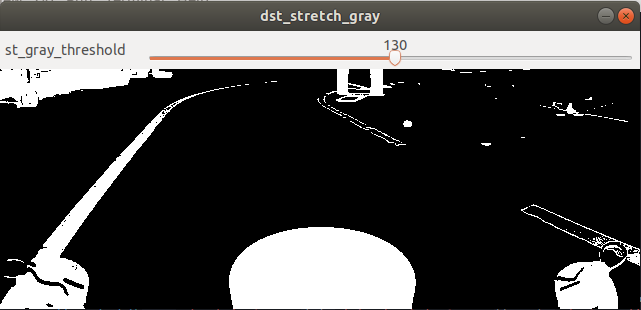
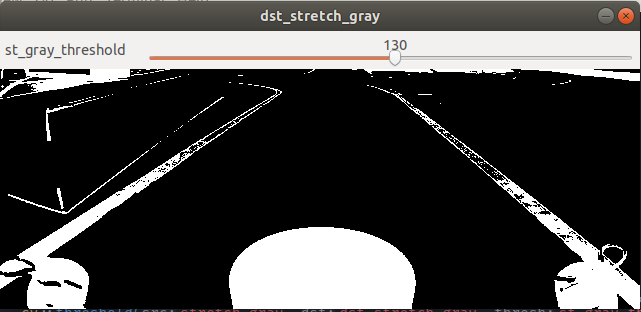
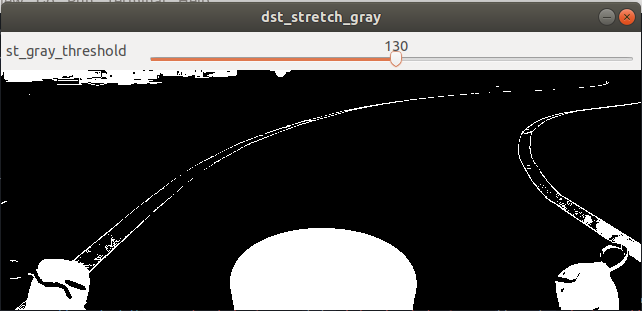
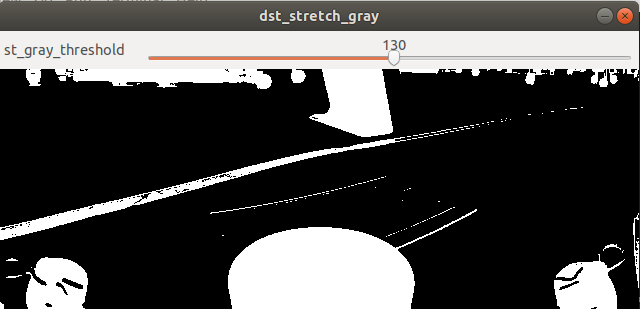
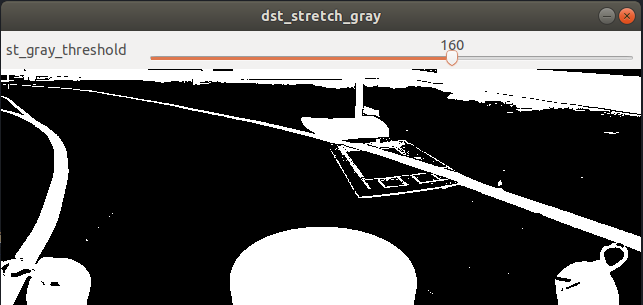
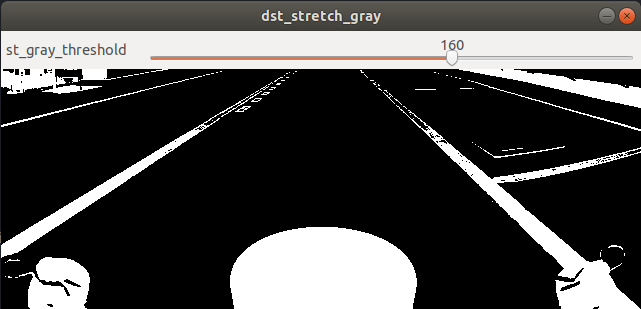
gray_stretch
- avg_time: 2.85232
130
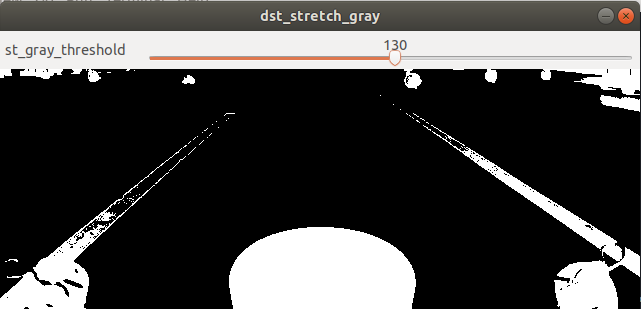

140

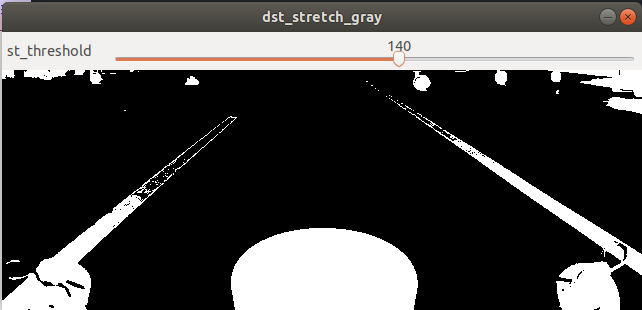

150
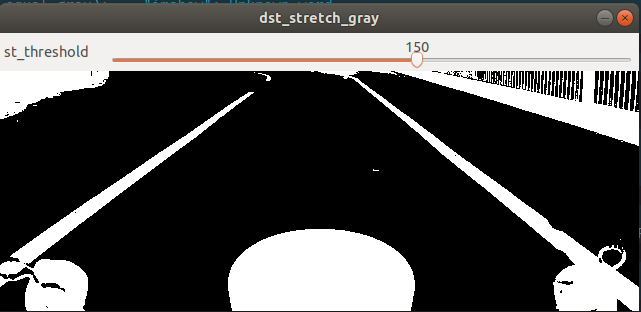
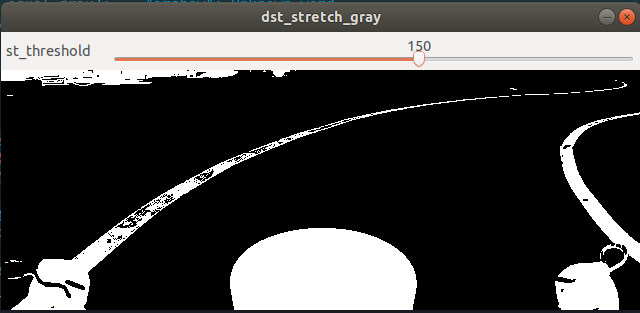
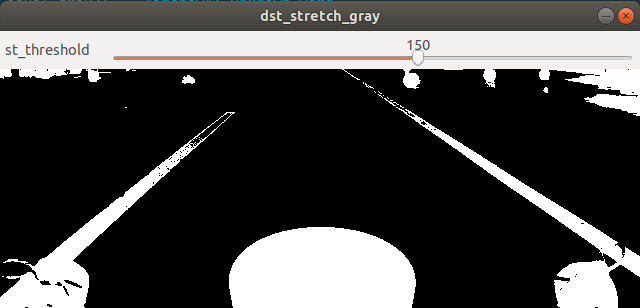
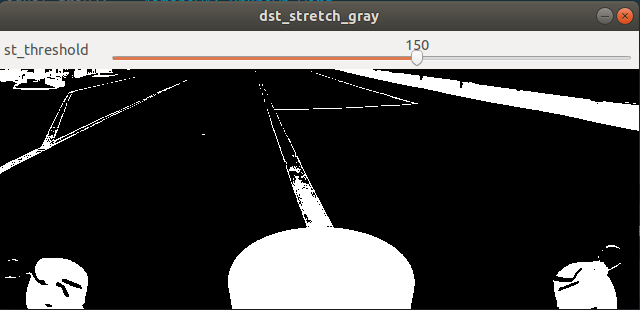
160
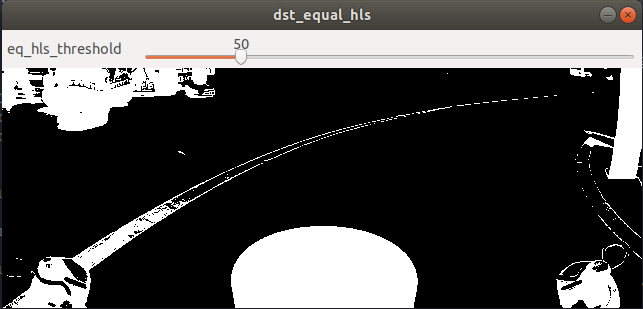
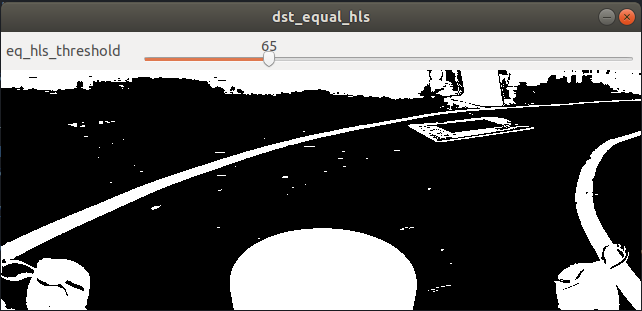
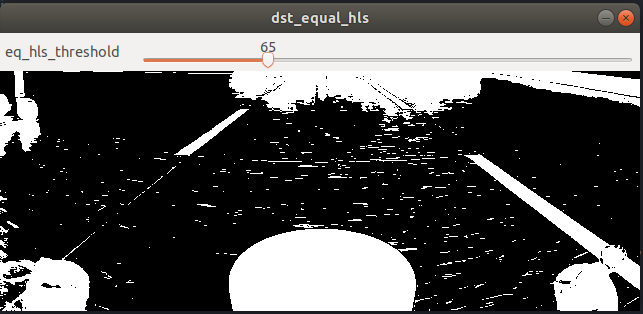
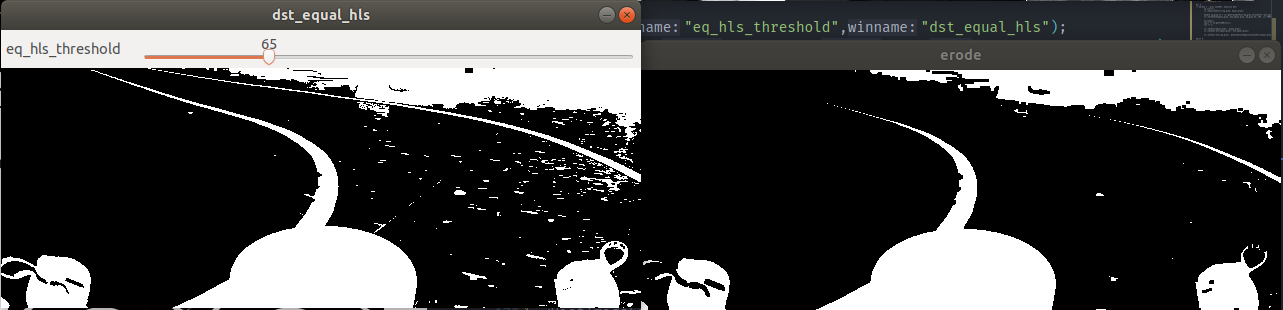
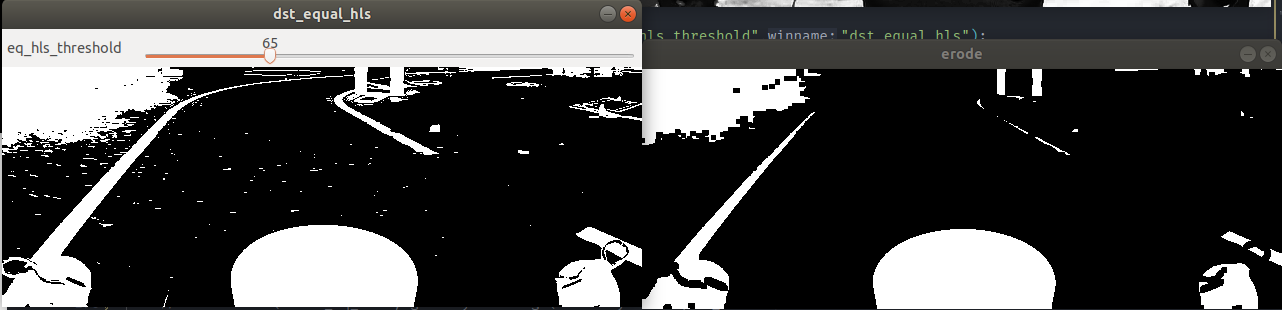
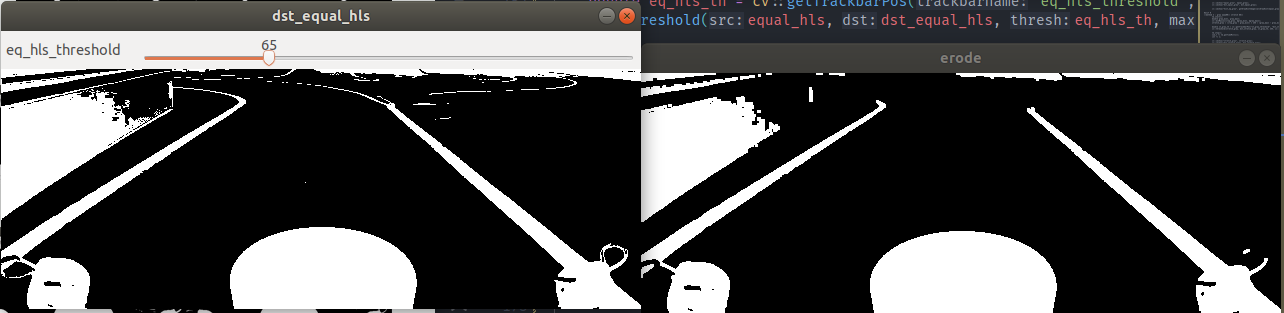
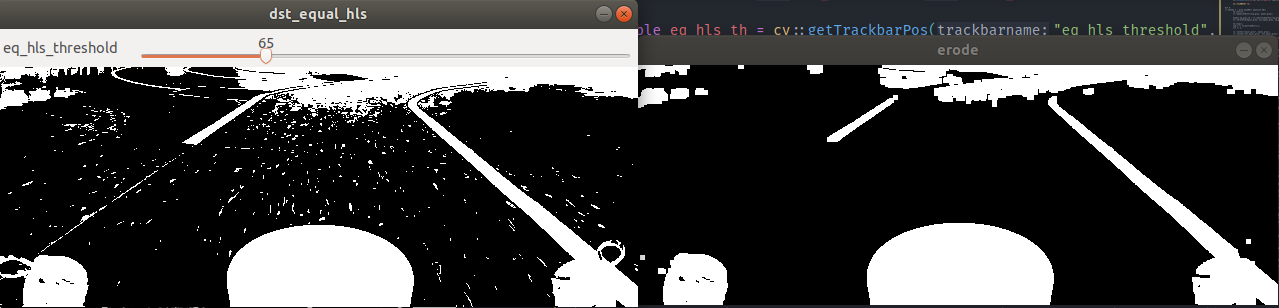
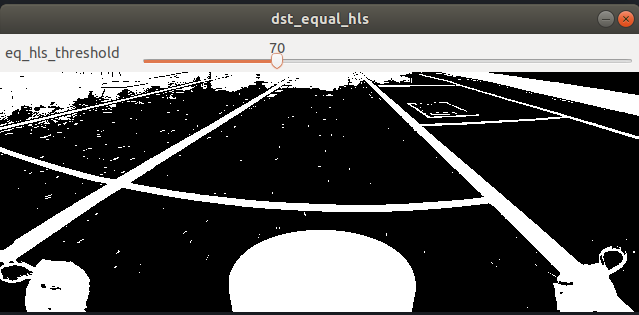
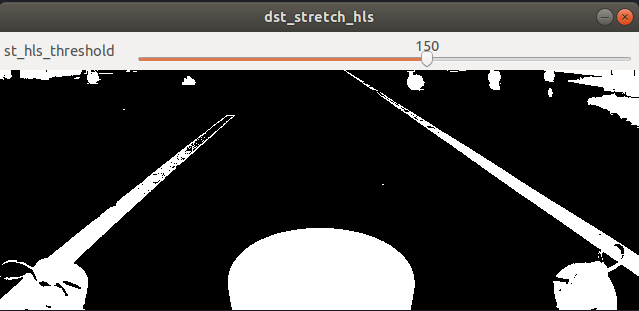
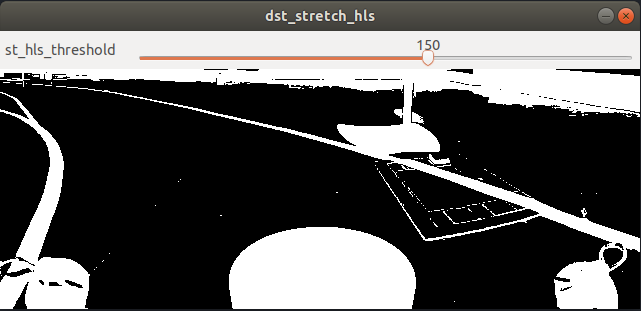
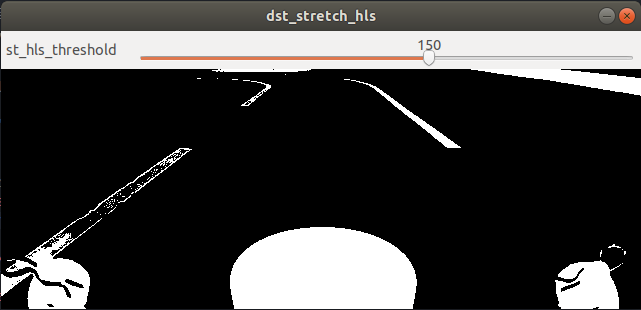
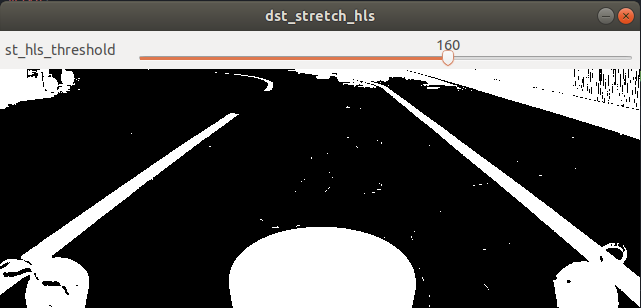
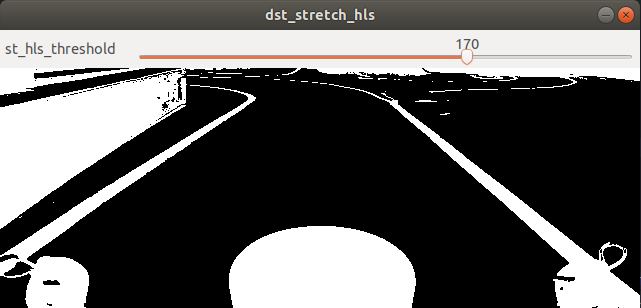
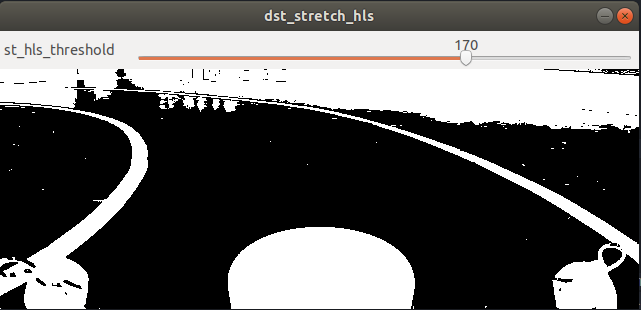
HLS (L부분)
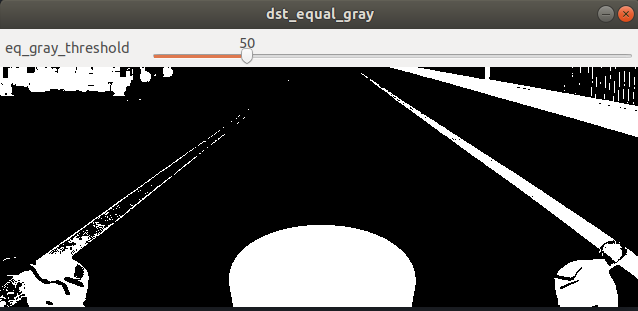
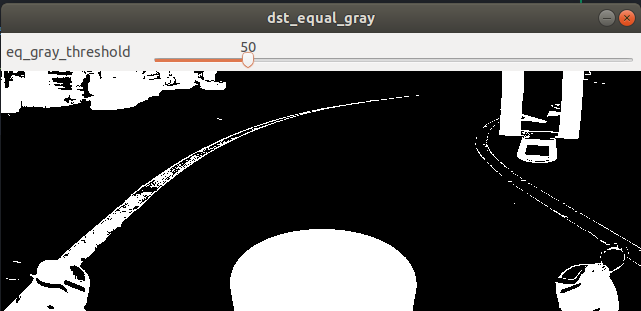
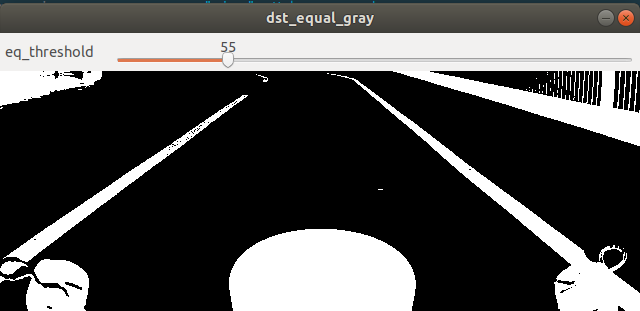
equalize
- avg_time: 0.96142
50
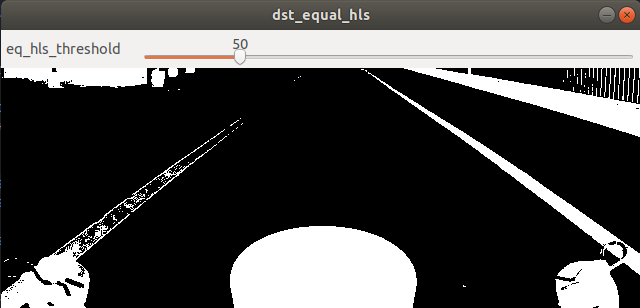
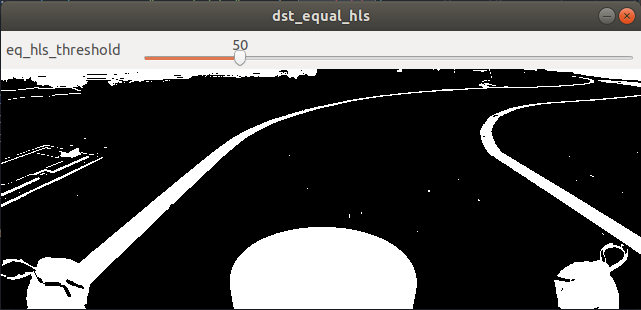
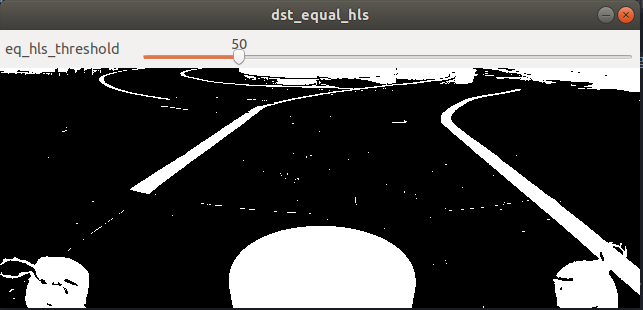
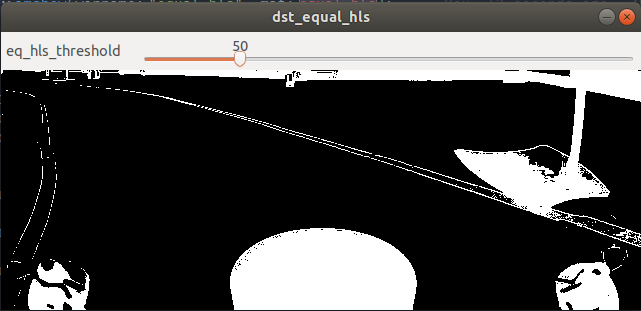
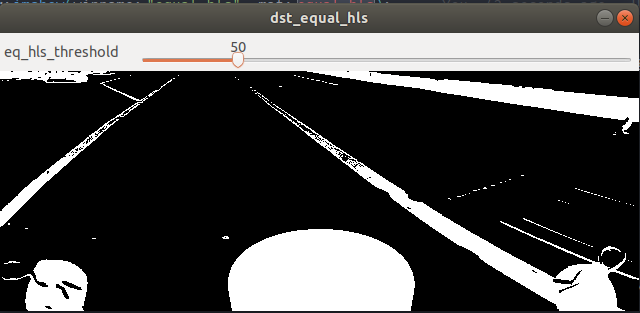
60

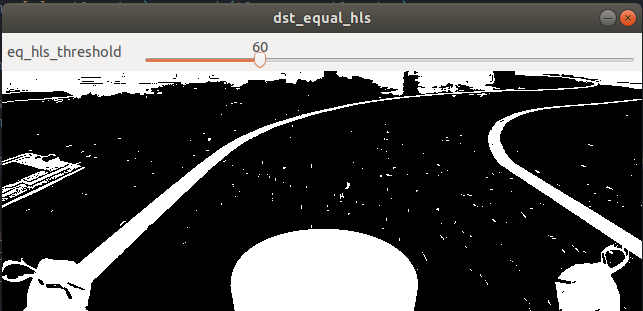
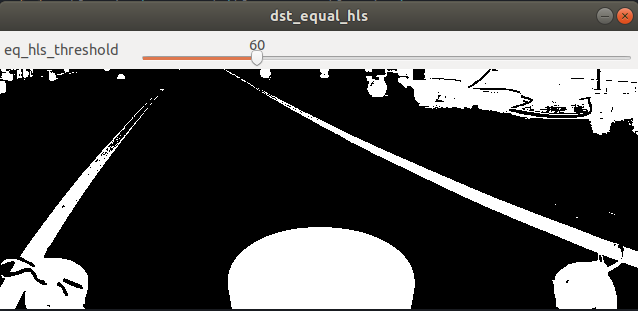
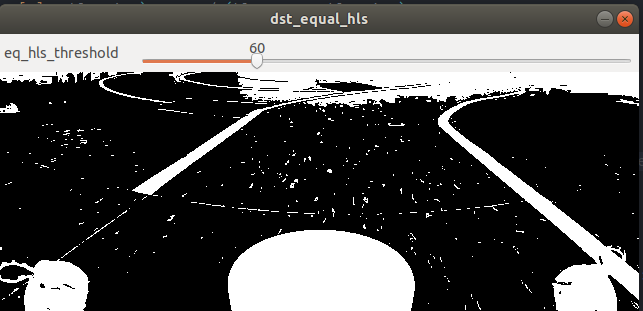
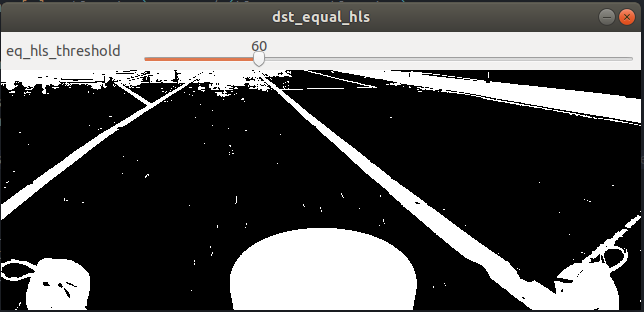
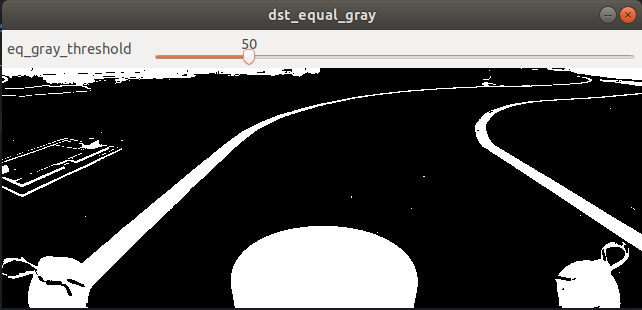
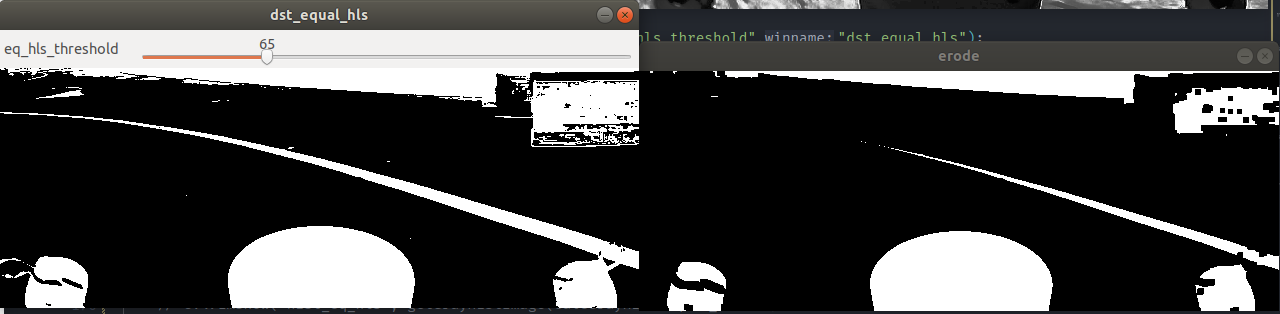
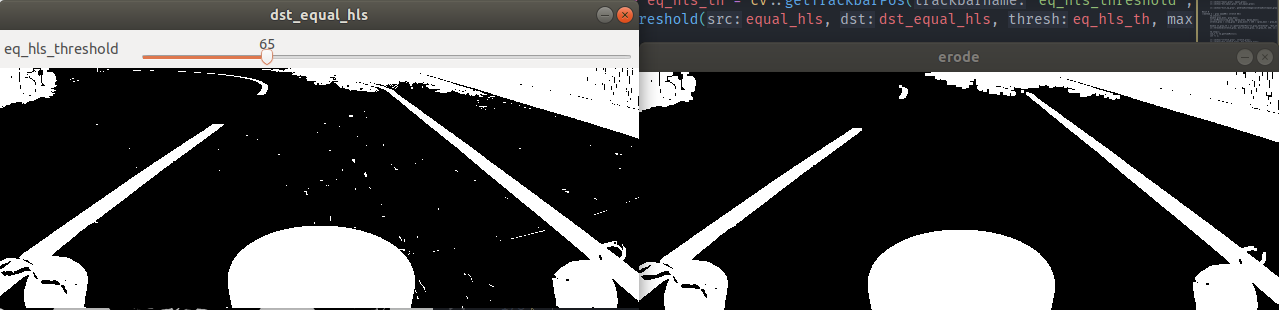
65
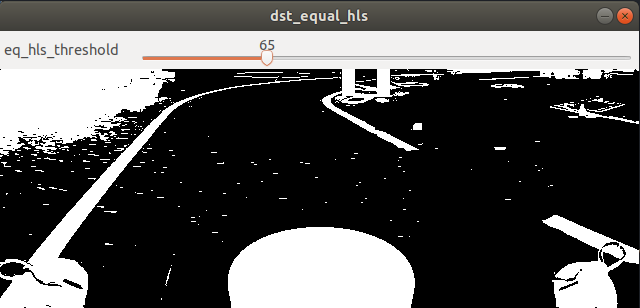


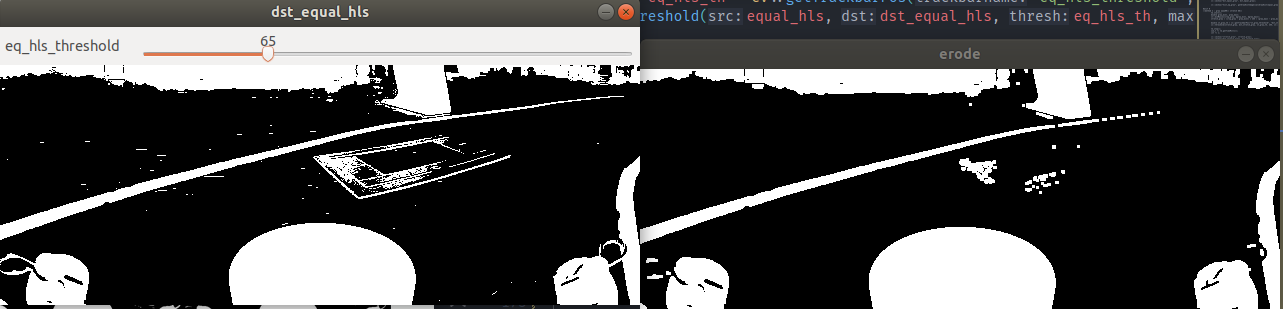
65 + morphology
- erode 1 : 큰 노이즈는 안사라짐 + 차선이 조금 얇아짐
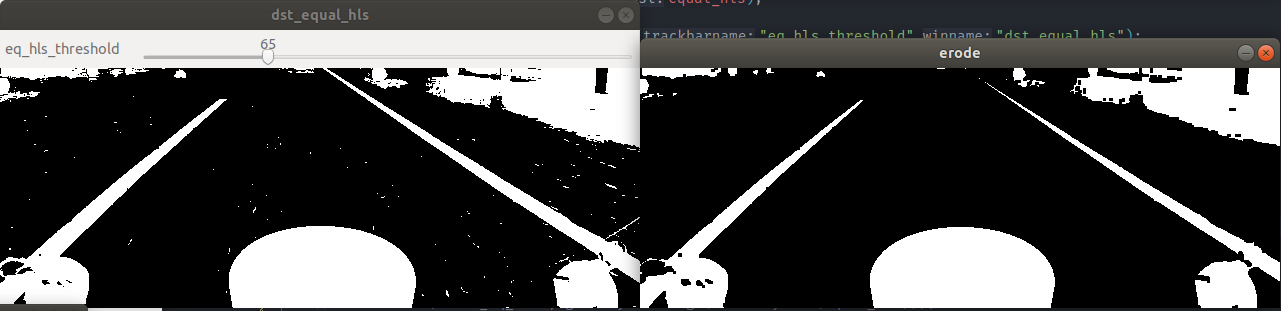
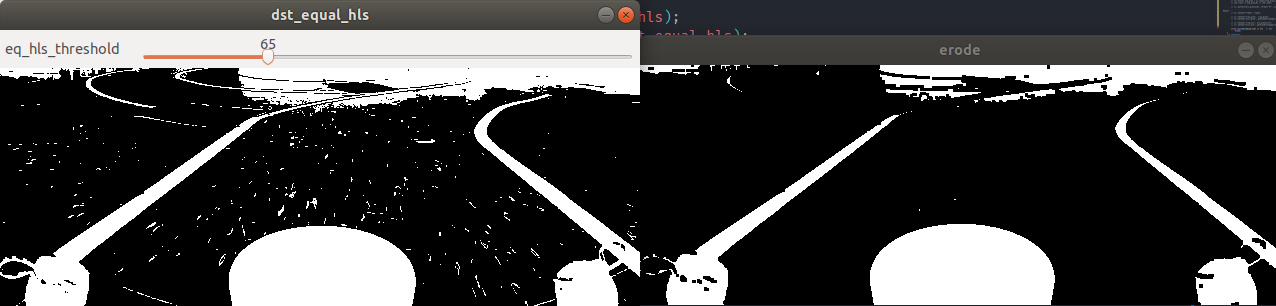
-
erode 2 : 노이즈가 많이 사라졌지만 차선이 많이 얇아져서 끊기는 부분이 생김
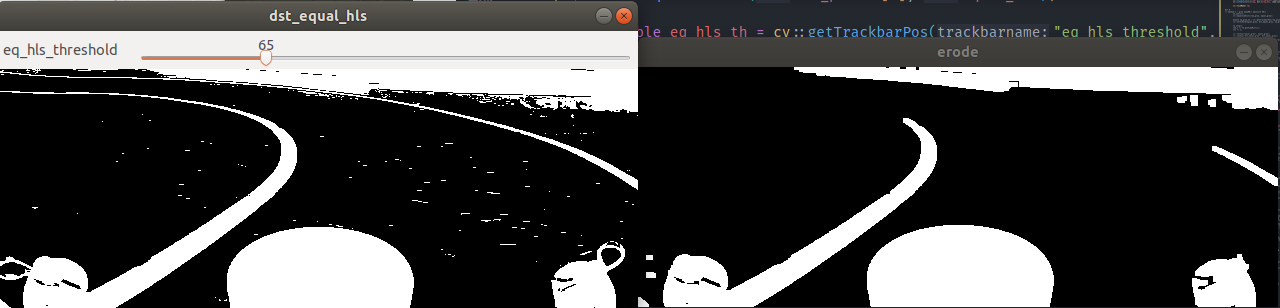
-
open 1 : 큰 노이즈는 살아있다 + 차선이 조금 끊기는 느낌이...
-
open 2 : 큰 노이즈는 없어졌지만 기존의 얇았던 차선은 사라진다.

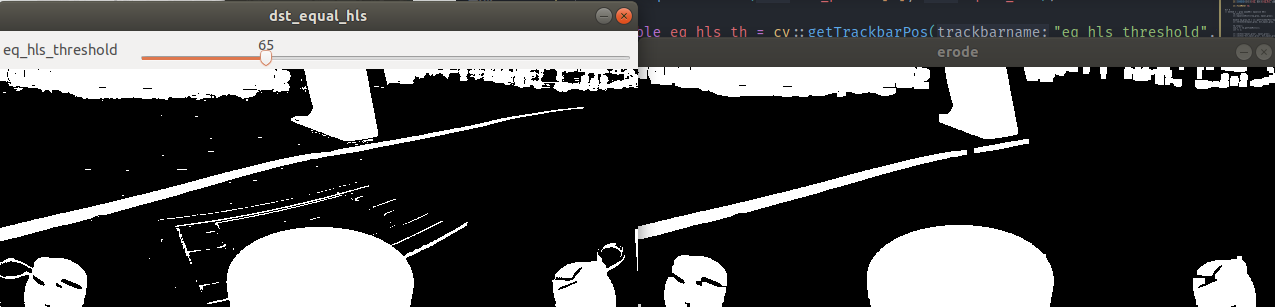
-
open 1 + close 1
Note
The number of iterations is the number of times erosion or dilatation operation will be applied. For instance, an opening operation (MORPH_OPEN) with two iterations is equivalent to apply successively: erode -> erode -> dilate -> dilate (and not erode -> dilate -> erode -> dilate).
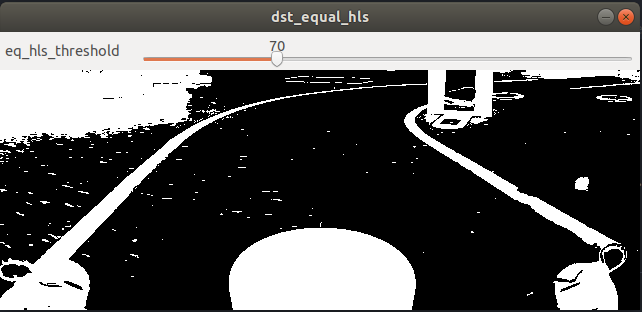
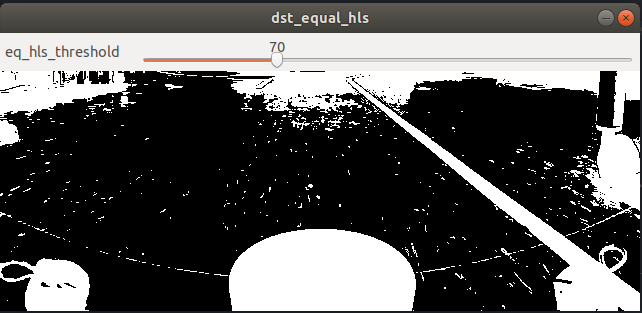
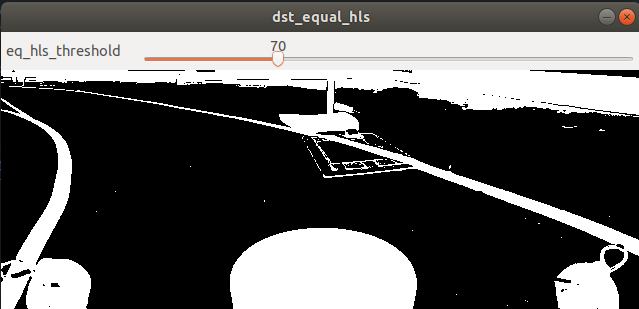
70
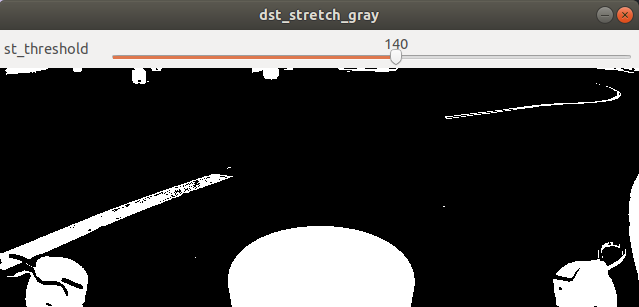
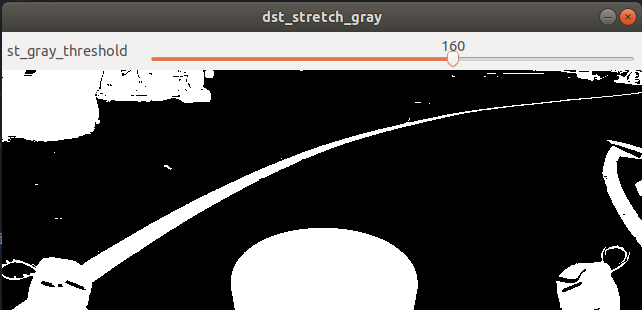
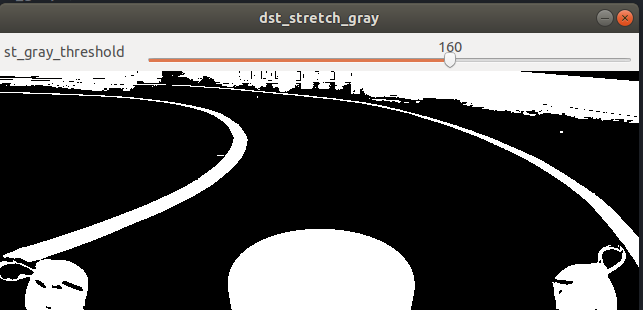
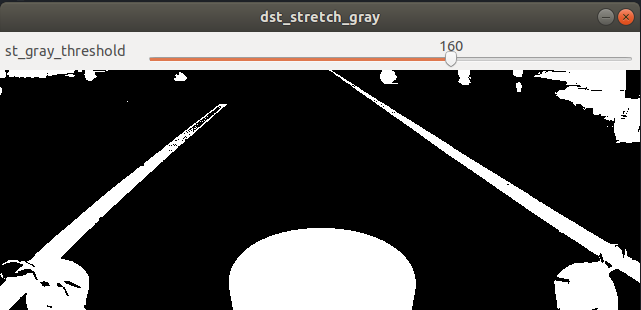
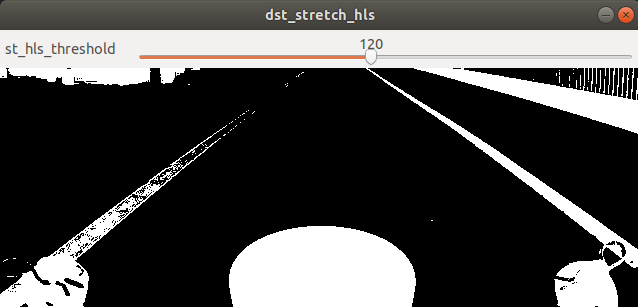
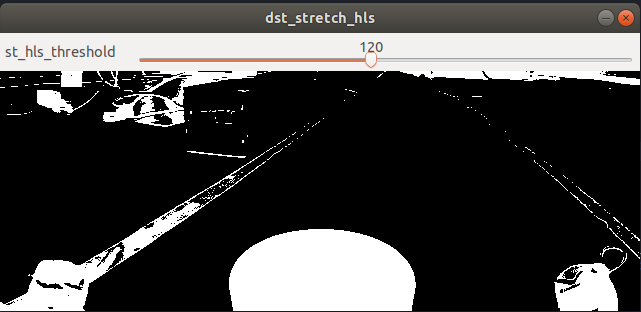
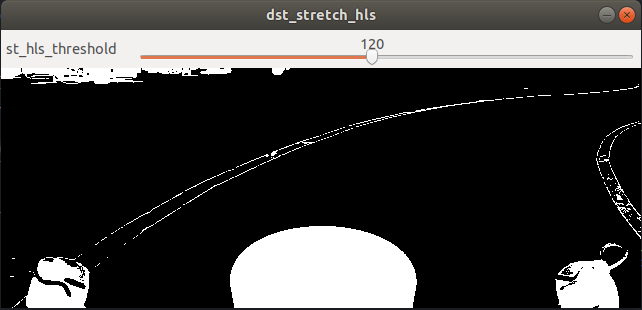
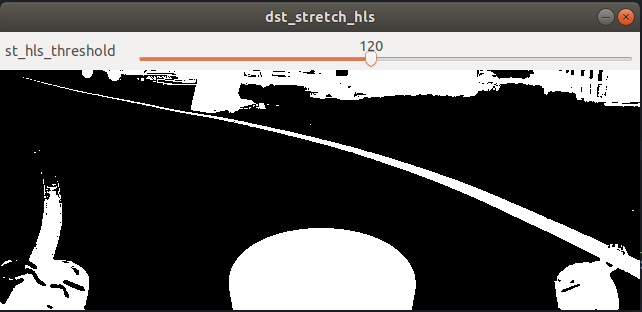
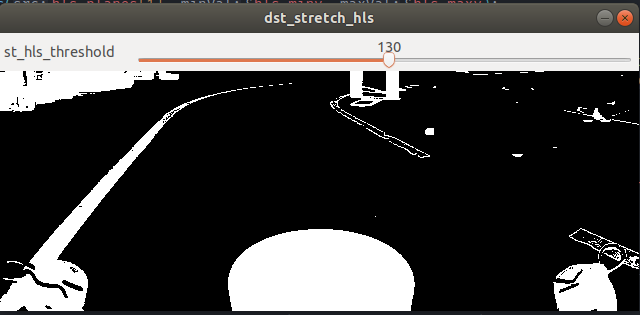
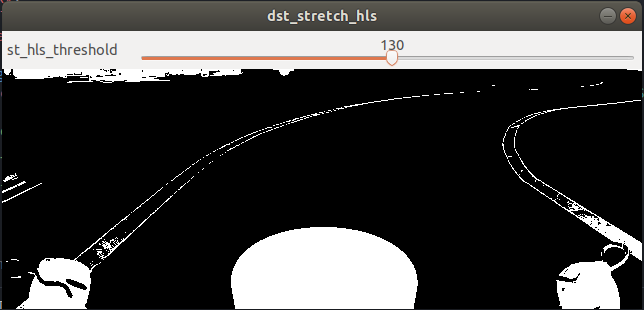
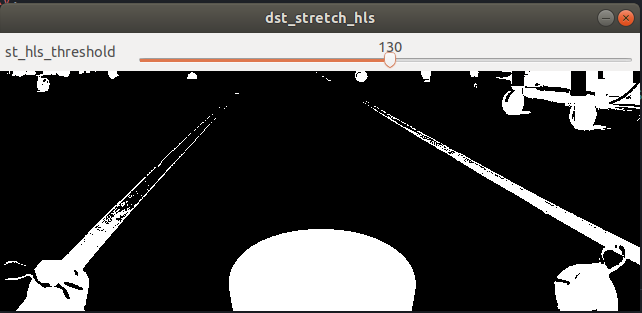
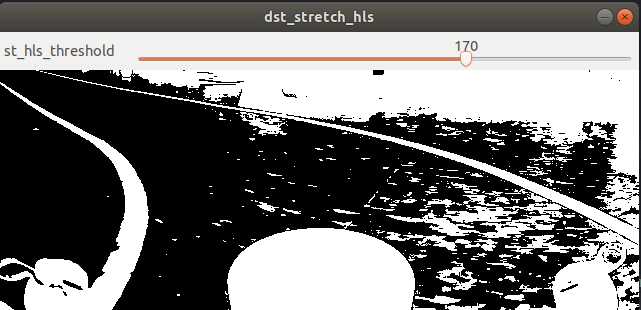
stretch
- avg_time: 2.79228 / minmax 제외 avg_time: 1.93319
120

130

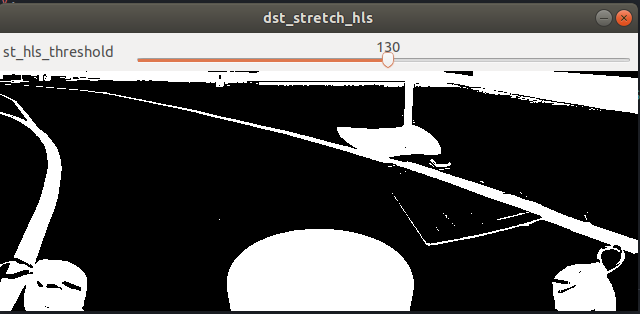

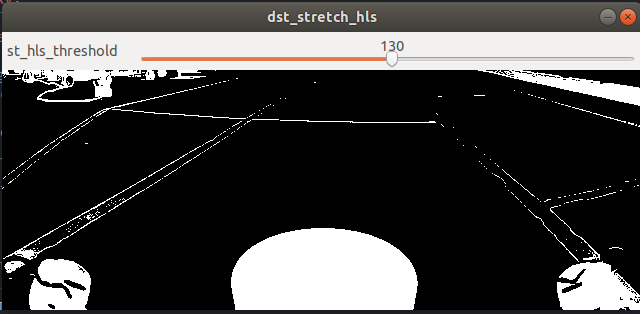
150

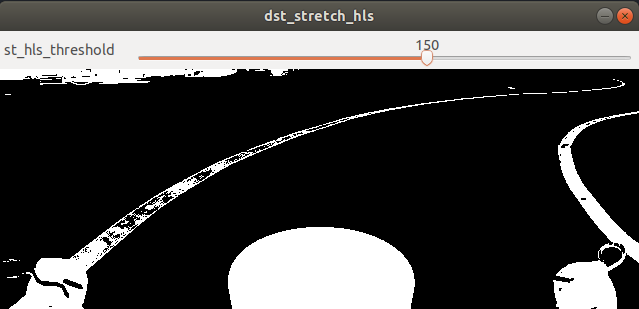
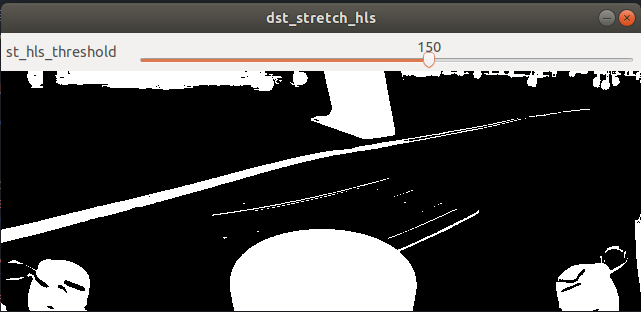
160
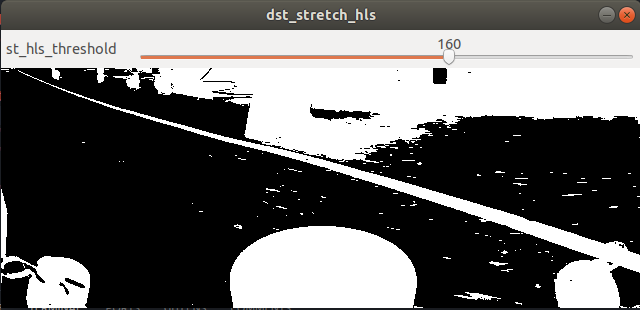
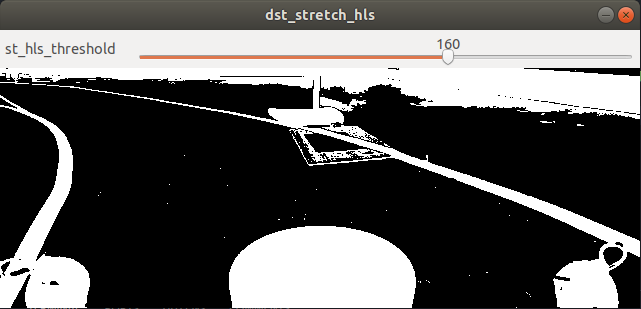

170

이진화 수행속도
- adaptive :8 ~ 9ms
- simple : 0.6 ~ 0.7ms
라이다 mask
-
이진화 수행 후 가우시안 블러링 하기 전에 적용
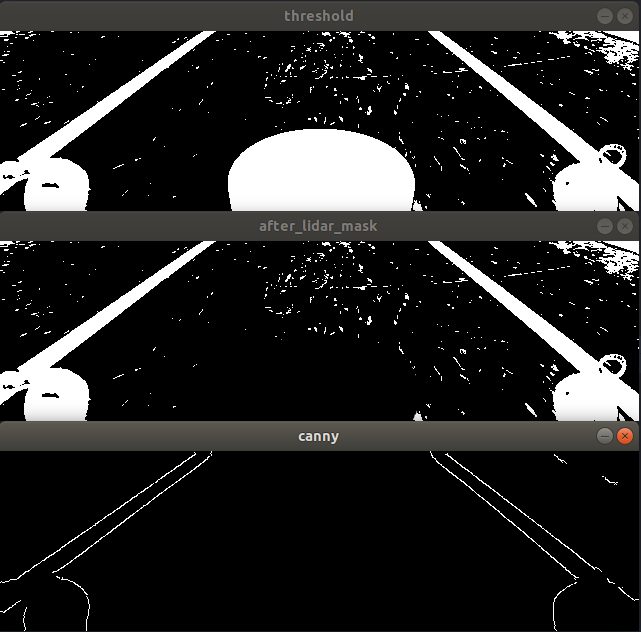
-
가우시안 블러링 이후에 수행하면 블러 때문에 캐니에지에서 에지로 검출된다
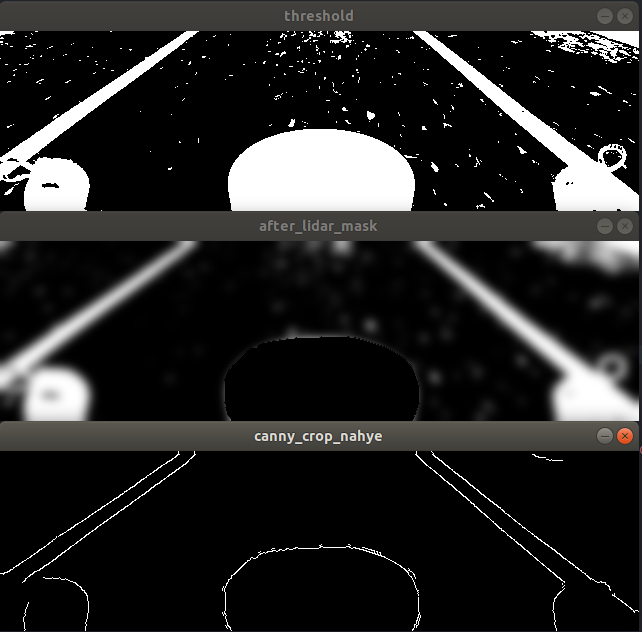
캐니 에지
- 모폴로지 연산 결과와 가우시안 블러 결과의 차이가 별로 없는데 가우시간 블러가 조금 더 깔끔하다.
허프 변환
- threshold 60과 100


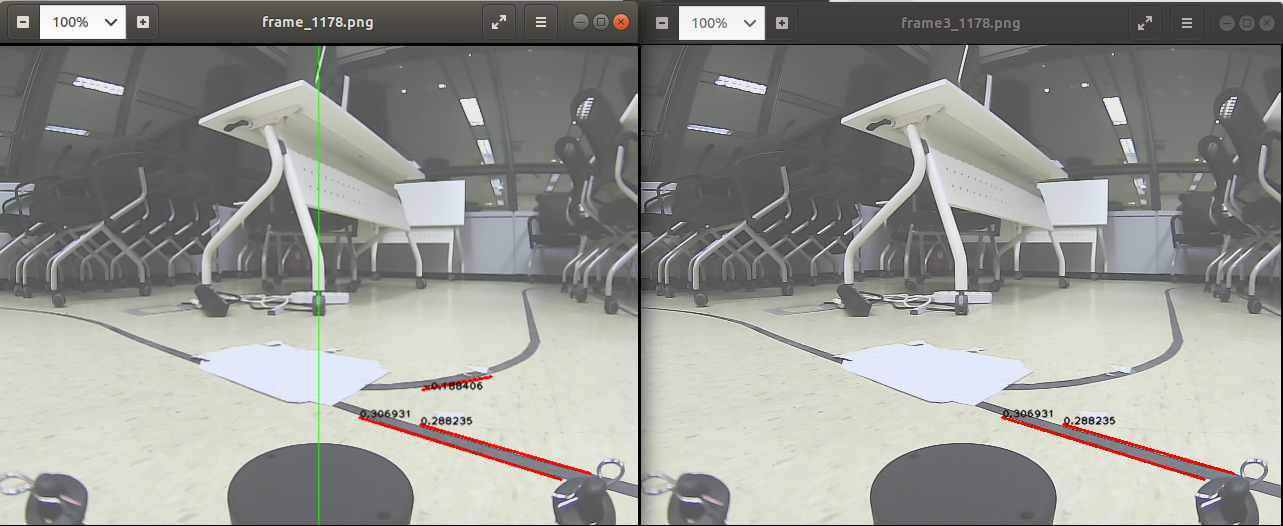
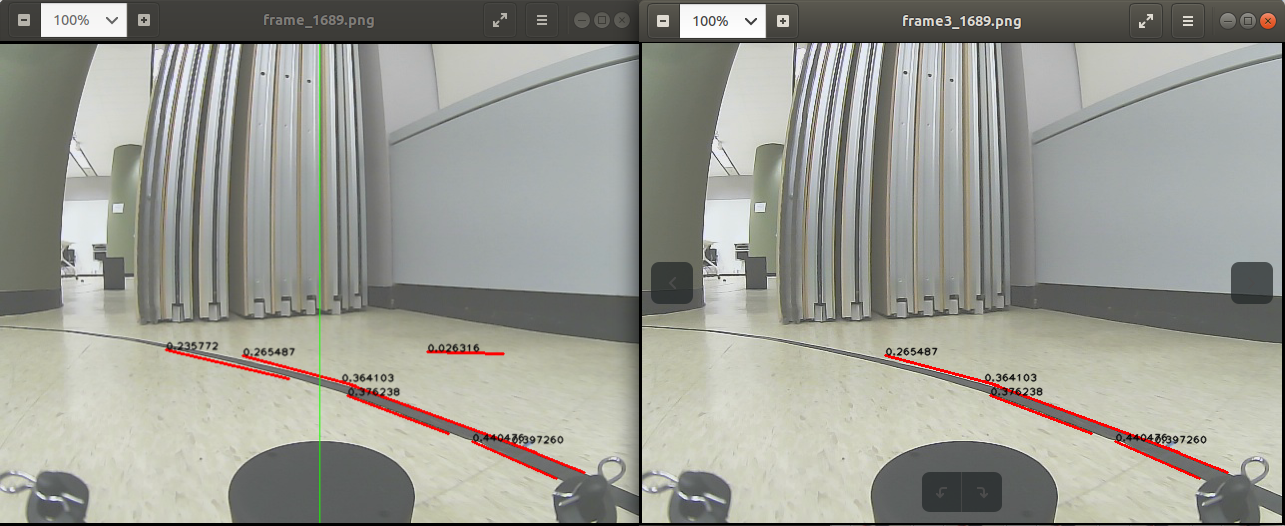
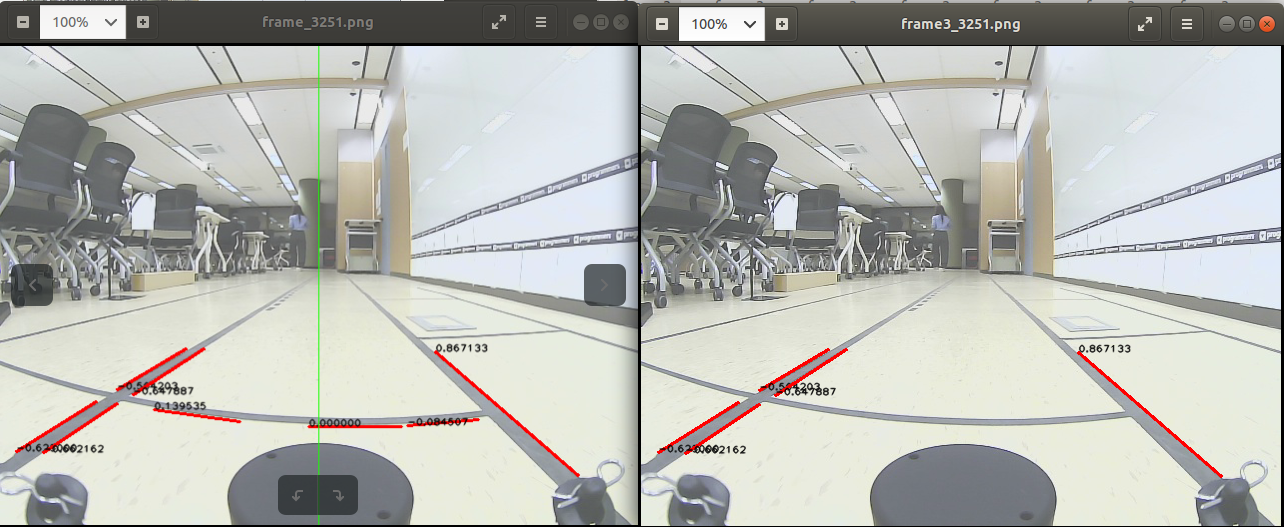
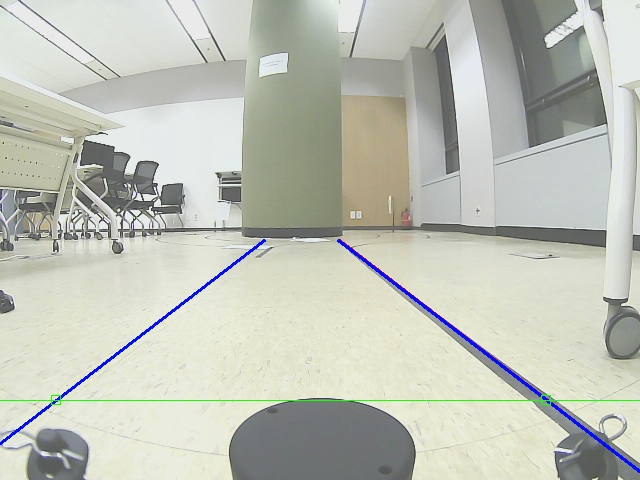
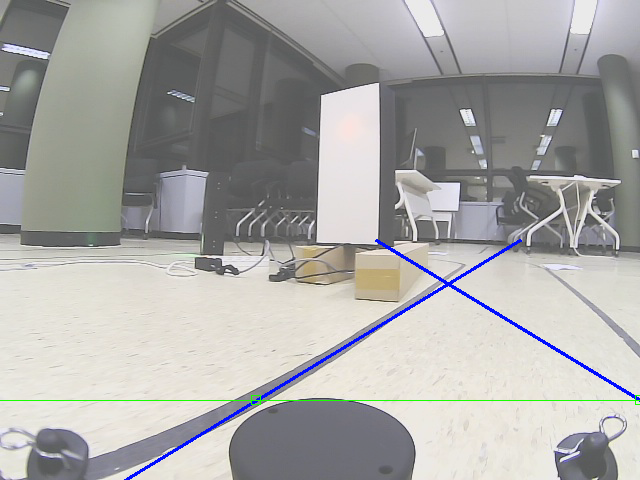
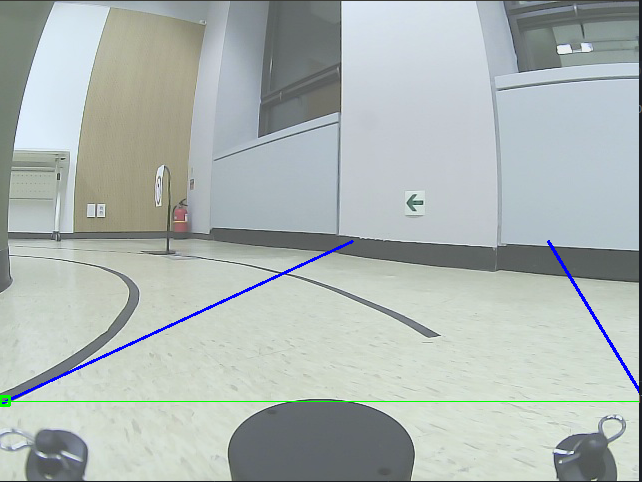
차선 검출
왼, 오른 차선 구분
- 아래와 같이 하는 경우 중심을 넘어가서 차선 검출이 안된다.
if((slope < 0) && (x2 < frame.cols / 2))
else if((slope > 0) && (x1 > frame.cols /2))
- 이렇게 변경하면 검출된다.
if((slope < 0) && (x1 < frame.cols / 2))
else if((slope > 0) && (x2 > frame.cols /2))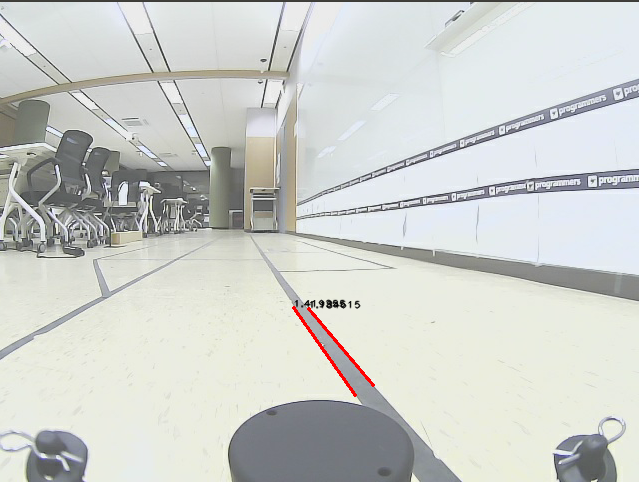
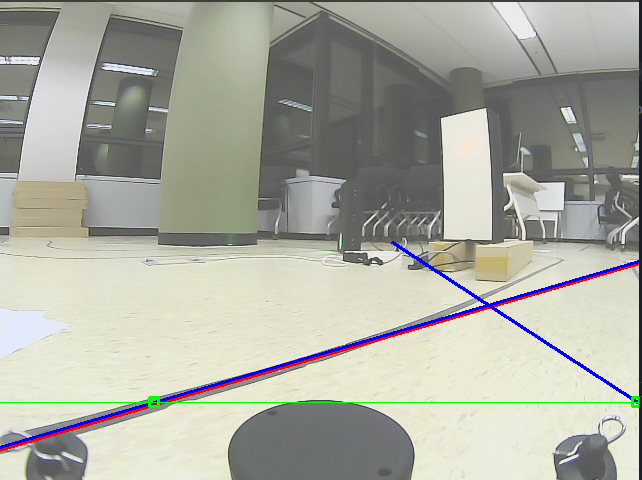
- 또한 왼쪽(음수), 오른쪽(양수) 기울기와 좌표에 따라 line을 선택한다. 그럼 아래와 같은 차선이 아닌 경우가 제거된다

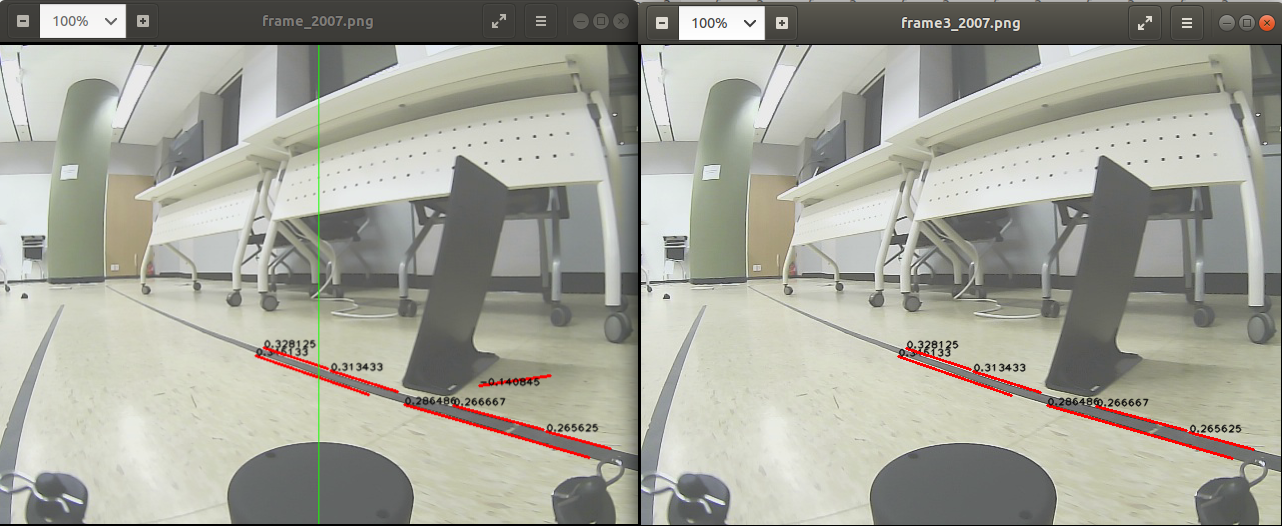

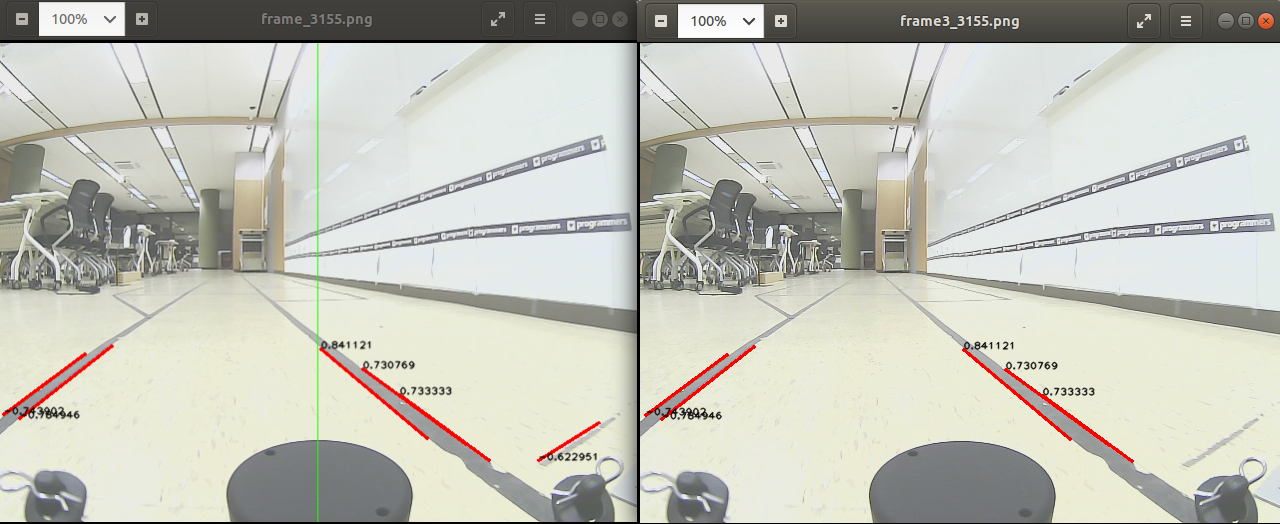
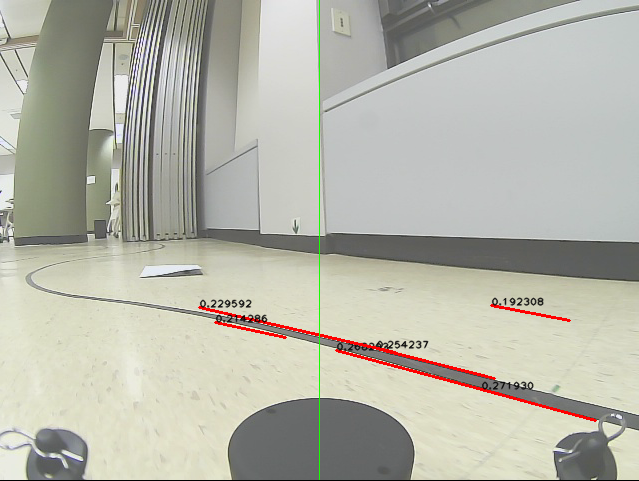
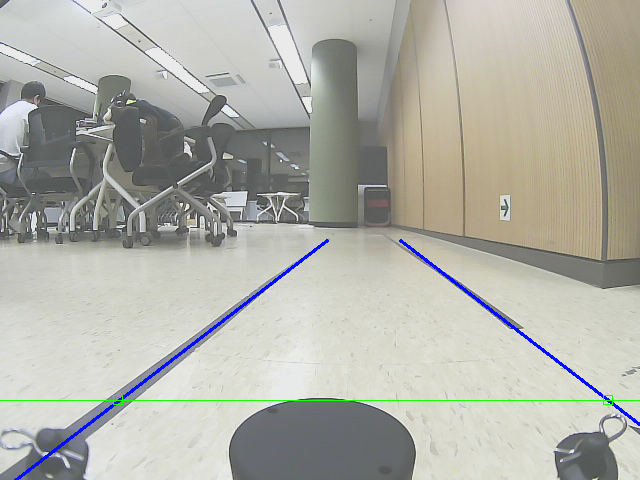
- 또한 기울기를 아래와 같이 변경하면 기울기가 0에 가까운 직선도 제거된다
if((slope < -0.1) && (x1 < frame.cols / 2))
else if((slope > 0.1) && (x2 > frame.cols /2))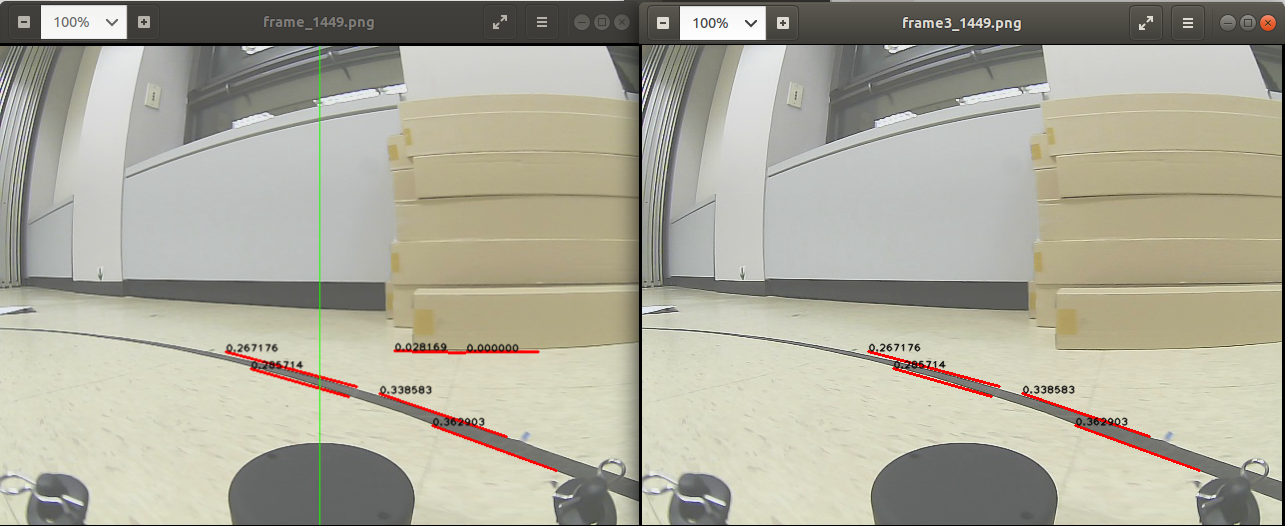
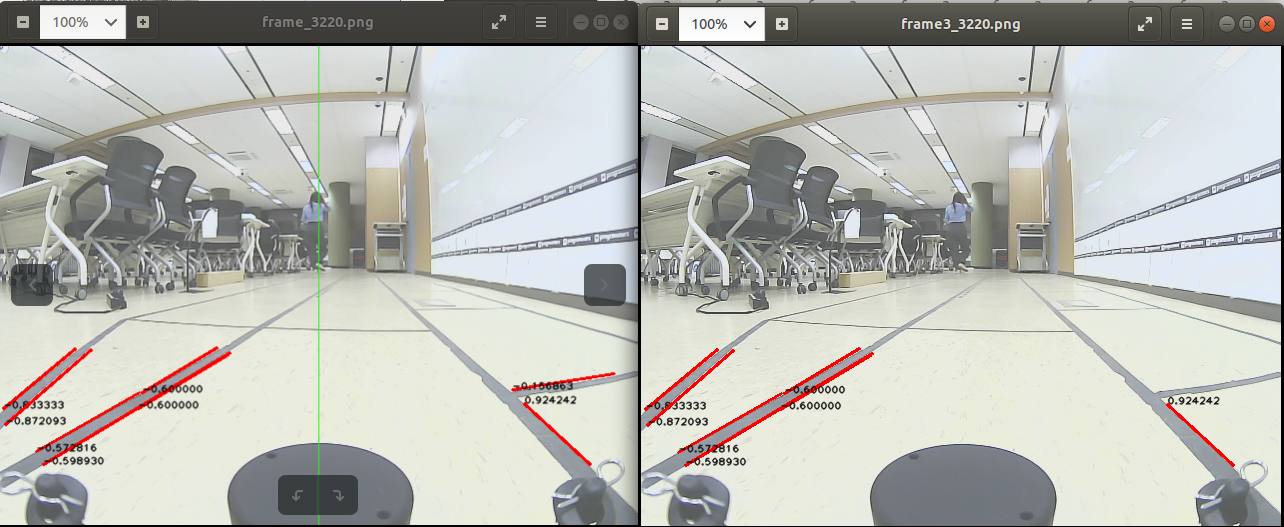
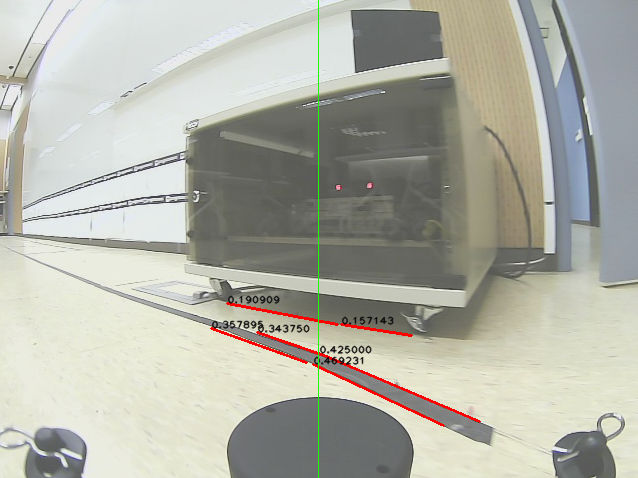
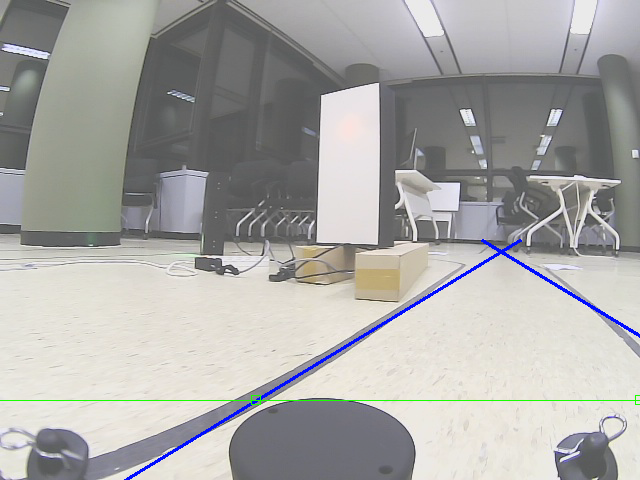
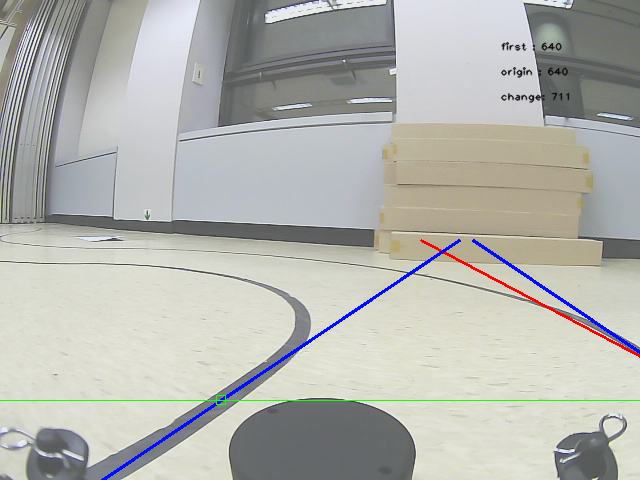
문제
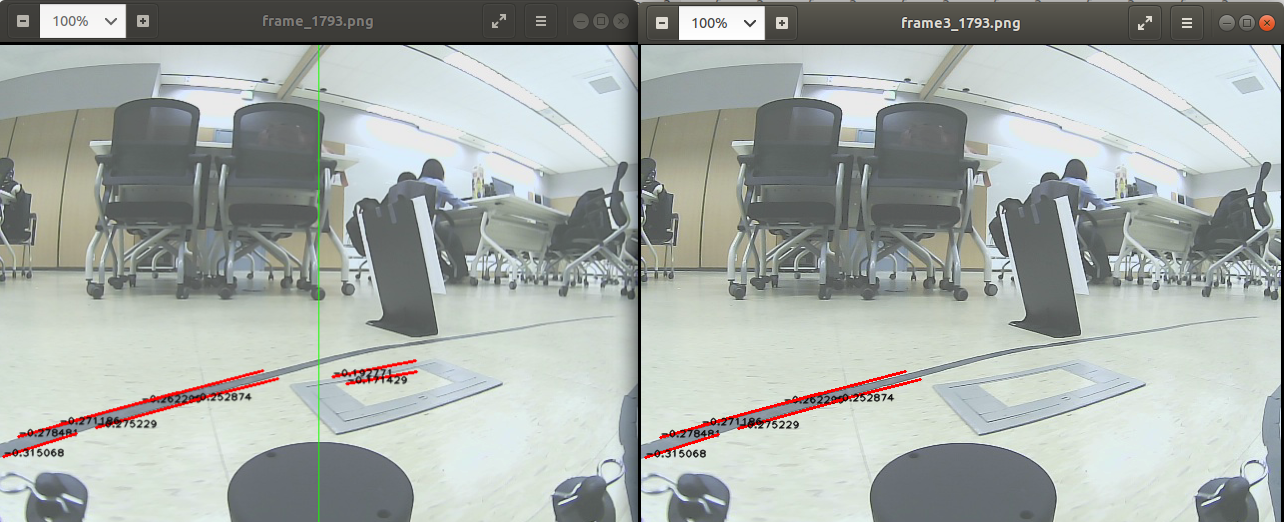
문제 1 : 검출되어야하는 차선이 검출이 안된다.
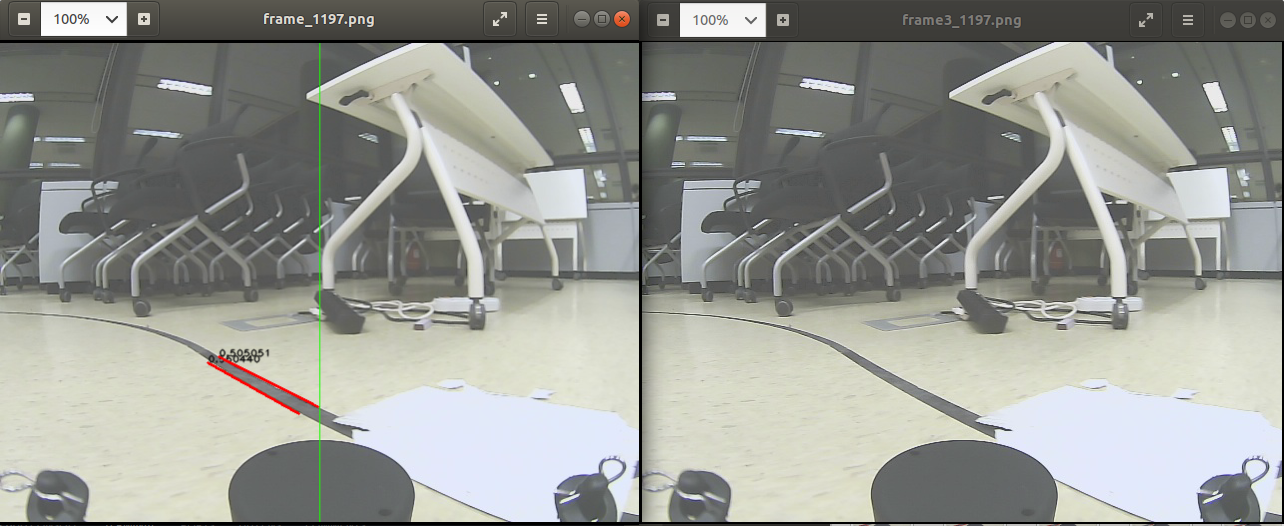

문제 2 : 정지선 검출이 안된다
- 이건 나중에 중앙에서 기울기가 0에 가깝다면, 이라는 경우로 검출할 수 있을지도?
- 이거는...전반적인 분포에서 많이 벗어나면 제거?
- 가장 문제인 부분 3개
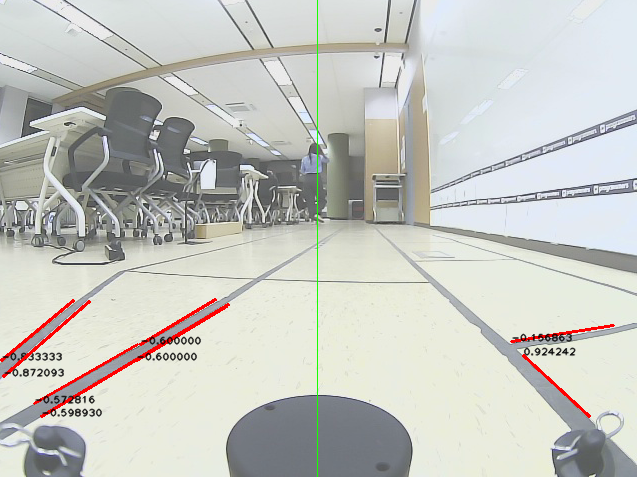
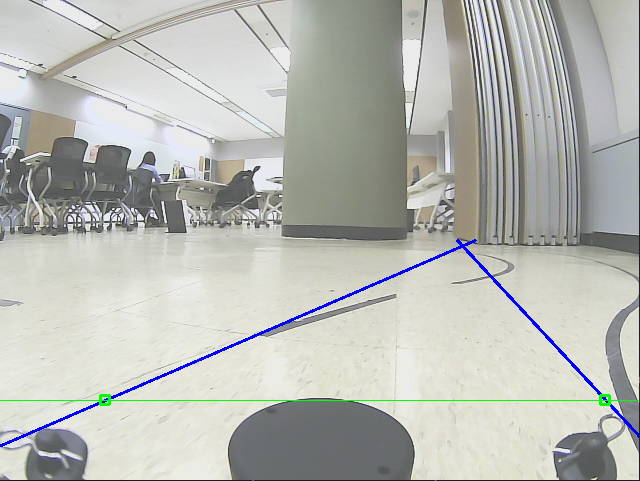
차선 좌표 출력
- 차선이 없는 경우 0, 640으로 고정
- 차선이 끊기는 경우가 해결안된다...

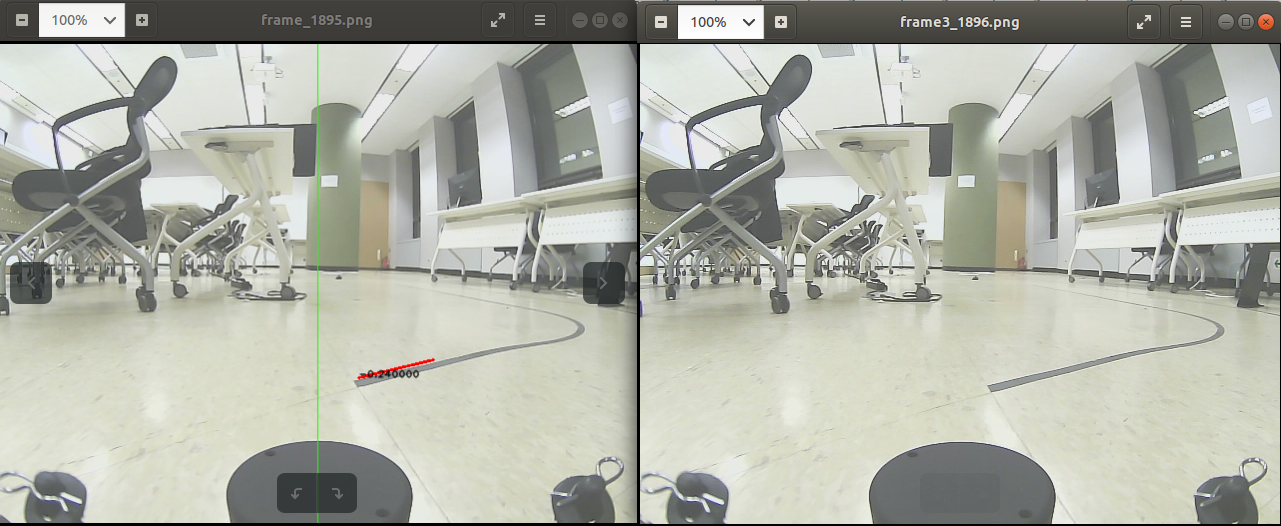
차선 끊김 해결
기울기 대칭
- 직진일 경우 한 차선이라도 검출된다면 대칭으로 기울기, 절편 만들어서 사용
- 직진인 경우는 나름 추정을 잘한다.
- 차선 예측 후 범위가 넘어가는 경우 발생. 이 경우는 예측하고 나서 범위가 영상 밖이라면 0, 640으로 지정하는 코드 추가
if((lpos >= 0) && (k_under_limit < abs(left_slope)) && (abs(left_slope) < k_upper_limit)){
rpos = lpos + k_lane_width;
if(rpos > k_lane_width) rpos = k_frame_width;
right_slope = -left_slope;
right_intercept = k_offset - right_slope * rpos;
}-그랬더니...이렇게 이상하게 예측...
- 그 이유는 맞게 검출된 rpos지만 영상을 벗어낫기에 640으로 조정한거여서 조정하기 전의 Rpos로 기울기, 절편을 수정한 후 변경해야한다.
if((lpos >= 0) && (k_under_limit < abs(left_slope)) && (abs(left_slope) < k_upper_limit)){
rpos = lpos + k_lane_width;
right_slope = -left_slope;
right_intercept = k_offset - right_slope * rpos;
if(rpos > k_lane_width) rpos = k_frame_width;
}
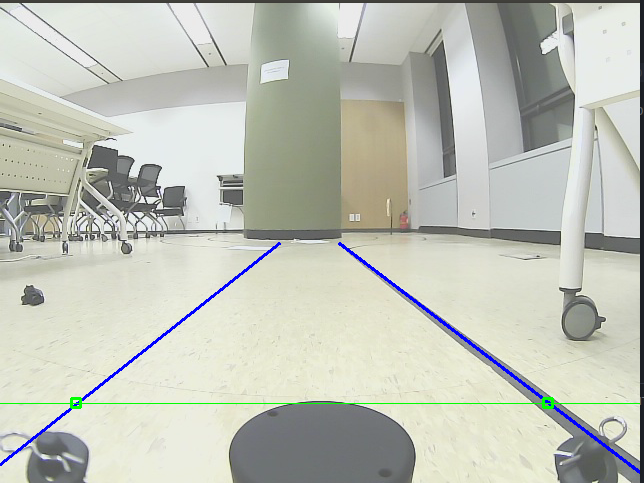
- 완벽하지는 않지만 아까보다 나아졌다.
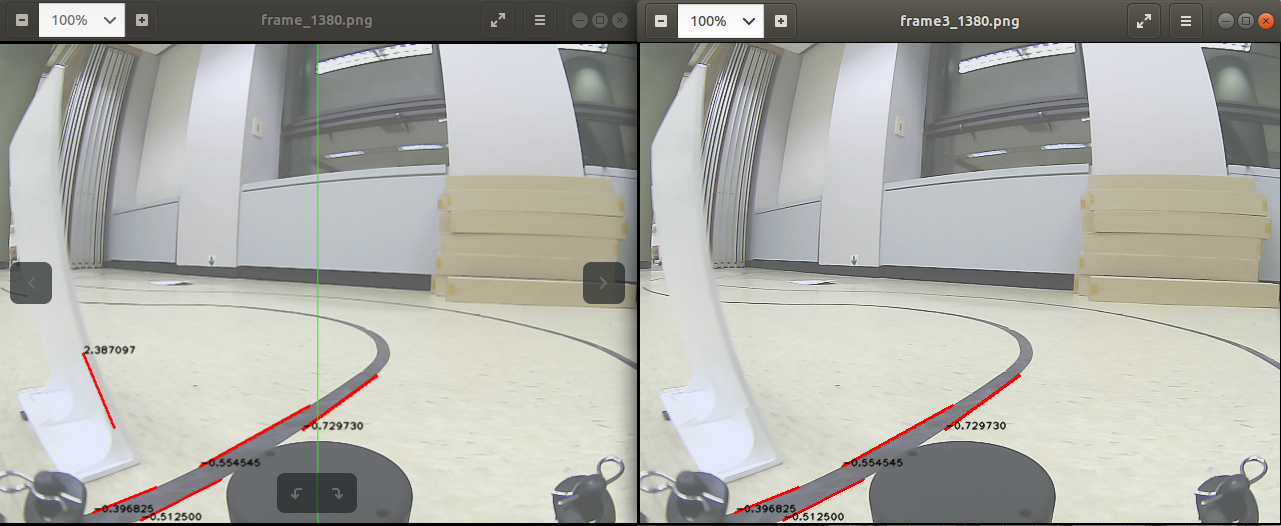
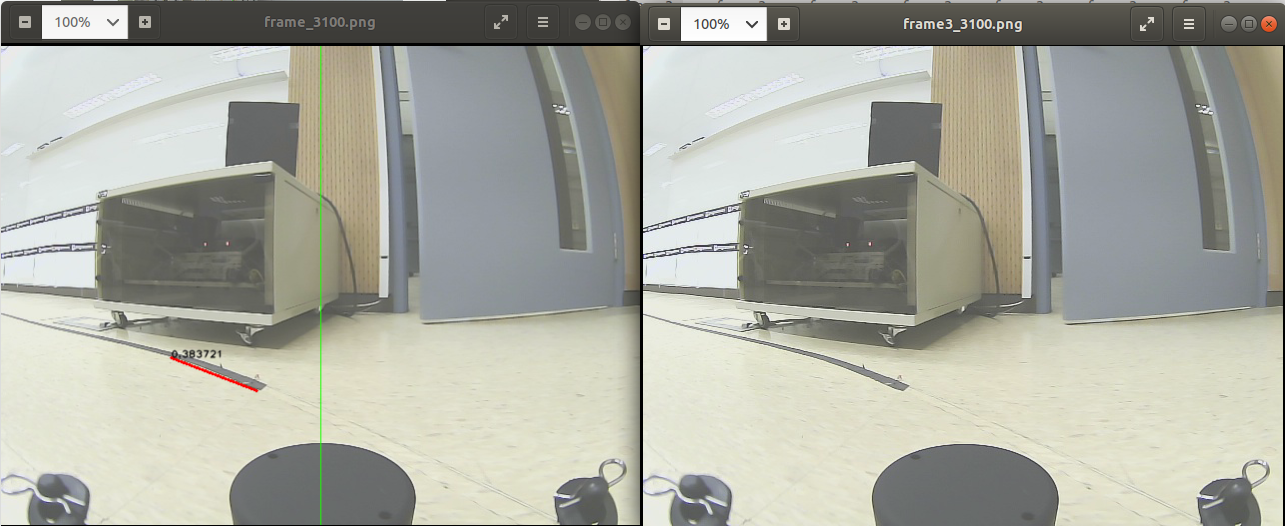
- 곡선일 때는 추정이 너무 복잡해서 구현하지 못했다. 다른 방법이 필요할듯

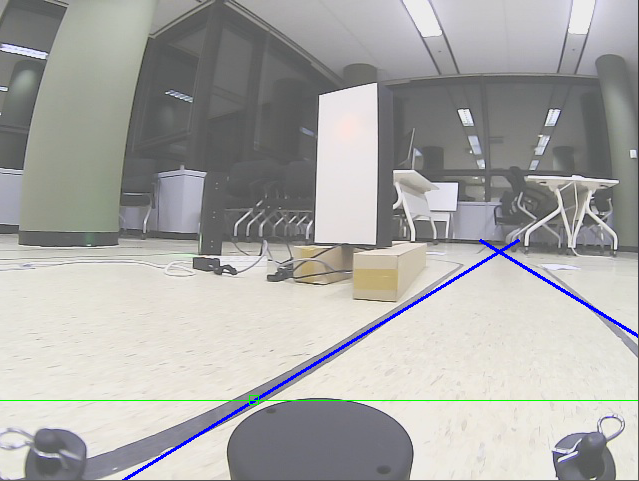
칼만 필터 사용
- 곡선, 직선 검출이 가능하지만 전반적으로 튀는 값들이 많다ㅠㅠ
문제
- 직선을 추정하고 offset인 400에서의 x좌표를 찾다보니 영상을 벗어나서 계산 되는 경우가 있다.
- 이는 0보다 작고 640보다 큰 경우는 0, 640으로 지정해주는 코드 추가로 해결
- 이는 0보다 작고 640보다 큰 경우는 0, 640으로 지정해주는 코드 추가로 해결
- 그러다보니 차선의 끊김이 아니라 가려진 경우에도 차선 추정을 하게 되어 조금 부정확해지는 경우가 있다
- 이는 왼, 오른쪽 차선의 lines를 배열로 따로 저장한 수 그 개수가 0이면 끊김이고 그렇지 않으면 값이 640으로 존재하는 것이라고 구분해야할 것 같다.
- 아니다. 그냥 그 if문의 순서를 바꾸면 될지도? 지금은 if로 기울기와 절편이 0인 경우 640을 지정하였다. 그 후 640인 경우는 끊겼다고 판단하여 추가작업을 진행하였는데 640을 지정하지 않으면 해결될 문제 인것 같다.
- 해결!!! : 아래와 같이 끊긴 경우는 아에 영상 밖에 존재하도록 설정하고 이를 통해 끊김확인 후 추정을 진행하였다.
void calculatePos(const double& slope, const double& intercept, int32_t& pos, bool left = false, bool right = false)
{
if(cvRound(slope) == 0 && cvRound(intercept) == 0){
if (left)
pos = -1;
else if (right)
pos = frame_width << 1;
}
else{
pos = static_cast<int32_t>((offset - intercept)/ slope);
if (left){
if (pos < 0) pos = 0;
}
if (right){
if(pos > frame_width) pos = frame_width;
}
}
}
void estimatePos(double& left_slope, double& left_intercept, double& right_slope, double& right_intercept, int32_t& lpos, int32_t& rpos)
{
if((lpos < 0) && (rpos <= frame_width)){
if((0.6 < abs(right_slope)) && (abs(right_slope) < 1)){
lpos = rpos - lane_width;
left_slope = -right_slope;
left_intercept = offset - left_slope * lpos;
}
}
else if((rpos > frame_width) && (lpos >= 0)){
if((0.6 < abs(left_slope)) && (abs(left_slope) < 1)){
rpos = lpos + lane_width;
right_slope = -left_slope;
right_intercept = offset - right_slope * rpos;
}
}
}- 이전 프레임의 기울기를 활용하는 부분이 있었는데 현재 프레임에 가중치를 높게 두었다. 하지만 현재의 값이 0인 경우 값이 이상하게 계산되어 일단 주석처리.
추가 사항
- 실제 자이카 할때는 밝기값이 다를테니 밝기를 128로 맞춘후 threshold 적용하면 좋겠다.
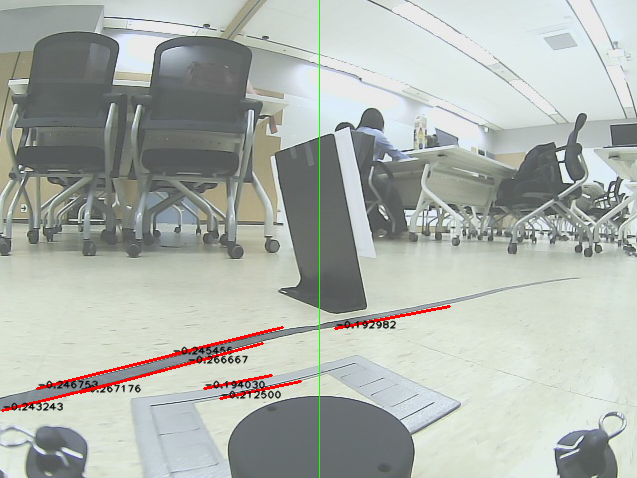
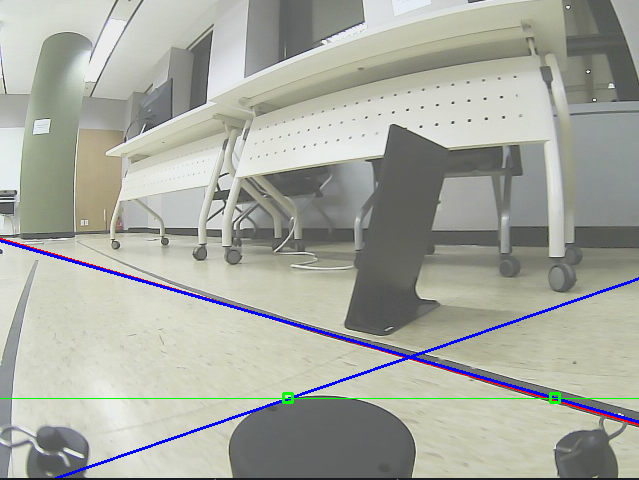
정지선 검출
try1
- 프레임 너비의 1/4 ~ 3/4 사이에 x 좌표 존재 && abs(기울기) < 0.15(threshold)이고 그 개수가 2개 이상이면 정지선!!
else if((abs(slope) <= 0.15) && (x1 > k_frame_width/4) && (x1 < k_frame_width/4 * 3))
stop_lines.emplace_back(x1,y1,x2,y2);- 차선이 아닌 부분도 정지선으로 인식된다..
- 정지선은 이렇게!
try 2 : x2로 끝 좌표 비교
else if((abs(slope) <= 0.15) && (x1 > k_frame_width/4) && (x2 < k_frame_width/4 * 3))
stop_lines.emplace_back(x1,y1,x2,y2);
try 3 : threshold width 변경 -> 선택
else if((abs(slope) <= 0.15) && (x1 > k_frame_width/5) && (x2 < k_frame_width/5 * 4))
stop_lines.emplace_back(x1,y1,x2,y2);- 이 조건을 만족하는 직선이 2개 이상일 때 정지선!

차선 중앙과 프레임 중앙 차이 = error
- 차선 너비의 중앙과 lpos, rpos의 중앙을 통해 후에 조향 조절
