자율주행 프로젝트
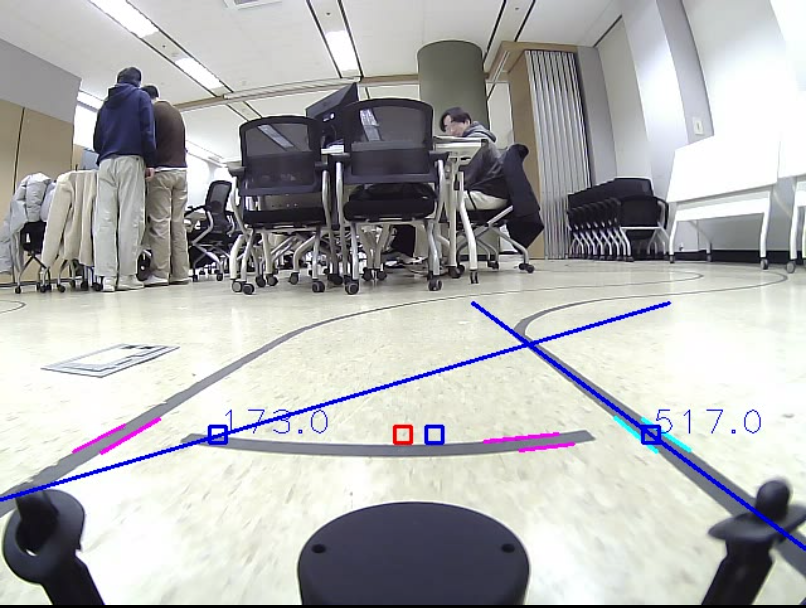
1.차선 인식 프로젝트 과정

차선 인식 프로젝트 과정
2023년 10월 30일
2.오프라인 차선인식 프로젝트 과정
오프라인 차선인식 프로젝트 과정
2023년 11월 14일
3.[딥러닝 프로젝트] 1. Center Point 모델 & nuScences Dataset

center point 모델과 nuScences dataset에 관한 설명
2024년 1월 15일
4.[딥러닝 프로젝트] 2. Center Point 모델 사용하여 object detection 수행하기 - 환경 설정
center point 모델을 사용하여 object detection을 수행하는 딥러닝 프로젝트의 환경 설정 부분
2024년 1월 15일
5.[딥러닝 프로젝트] 3. Center Point 모델 사용하여 object detection 수행하기 - 실행
center point 모델 사용 방법 (train, test, tracking 방법)
2024년 1월 15일
6.[딥러닝 프로젝트] 4. Center Point 모델 사용하여 object detection 수행하기 - 결과
centerpoint 모델 학습 결과
2024년 3월 5일
7.[객체인식 & Depth Estimation 프로젝트] 1. Data Labeling
dataset 구조와 labeling 방법
2023년 12월 27일
8.[객체인식 & Depth Estimation 프로젝트] 2. YOLO v3 tiny 실행 전체 과정
YOLO v3 tiny 모델 학습 및 onnx, tensorRT 변환 과정
2024년 1월 5일
9.[객체인식 & Depth Estimation 프로젝트] 3. yolo v3 tiny model 학습
yolo v3 tiny model train 방법
2024년 1월 18일
10.[객체인식 & Depth Estimation 프로젝트] 4. YOLO v7 tiny 모델

YOLO v7 tiny 모델을 사용하여 전이학습 진행
2024년 1월 29일
11.[객체인식 & Depth Estimation 프로젝트] 5. Camera Calibration (GML camera calibration)
카메라의 intrinsic matrix와 distortion coefiicient를 구하여 이미지의 왜곡을 제거하는 camera calibration 수행
2024년 1월 29일
12.[객체인식 & Depth Estimation 프로젝트] 6. Depth 추정 (Homography) + Bird-Eye view 표현
homography 방법을 사용하여 object와 자이카와의 depth를 추정하여 즉, 거리를 추정
2024년 1월 29일
13.[객체인식 & Depth Estimation 프로젝트] 7. 전체 알고리즘
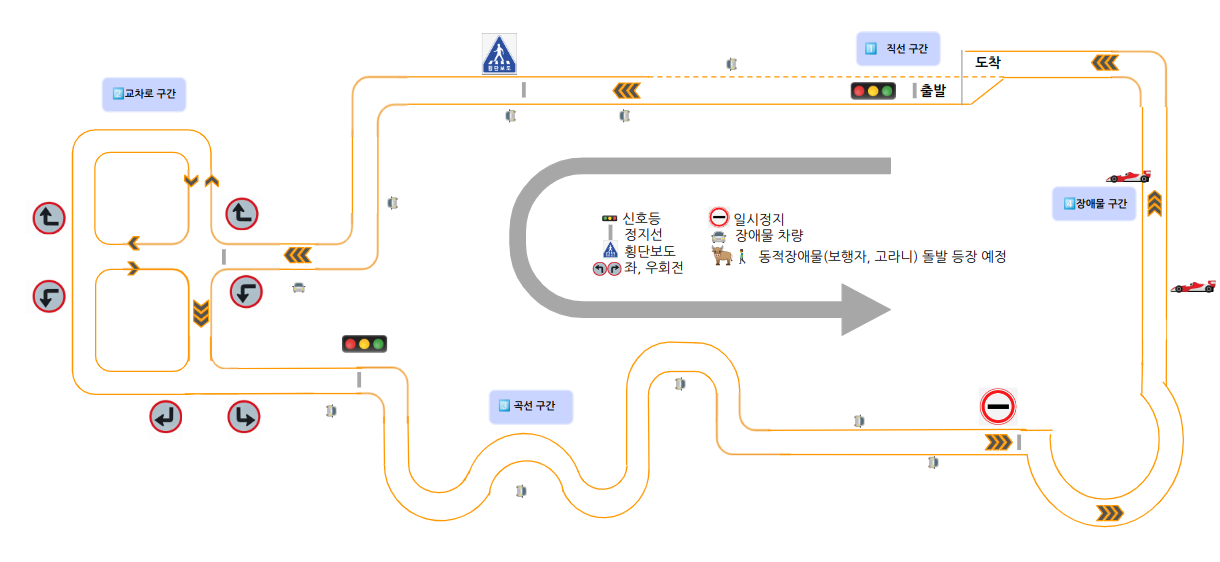
객체 인식 및 depth 추정을 통한 차선 인식 주행 프로젝트
2024년 1월 29일
14.[Sensor Fusion 프로젝트] 1. Object Detection (2D & 3D)

2D & 3D Object Detection
2024년 1월 31일
15.[Sensor Fusion 프로젝트] 2. LiDAR Projection 과정 및 구현 (Open3D, Mayavi)
KITTI 데이터셋을 활용하여 LiDAR, image calibration 및 LiDAR 데이터 projection
2024년 2월 4일