🎮 Unreal Pathfinding Algorithm
최단경로 알고리즘은 다익스트라 알고리즘, A-Star 알고리즘 등이 있지만 언리얼 엔진의 최단경로 알고리즘 즉 Pathfinding 알고리즘은 업계의 비밀이라 자세하게는 어떤 형식의 알고리즘인지는 알 수 없지만 가장 저렴한 비용으로 목표 지점까지 이동하도록 설계되어있다고 홍보한다.
하지만 낮은 비용으로 선택하는 원리는 같다. 따라서 비용설정을 통해 AI의 경로를 유도할 수 있다.
1️⃣ Nav Modifier Volume
Nav Modifier Volume 생성을 통해 고비용 Obstacle을 배치함으로써 AI 이동을 유도할 수 있다.
📌 Volume 생성
- Nav Modifier Volume을 생성하면 다음과 같이 NavMesh 안에 빈곳이 생기게 된다. (Project Setting Runtime : Dynamic)
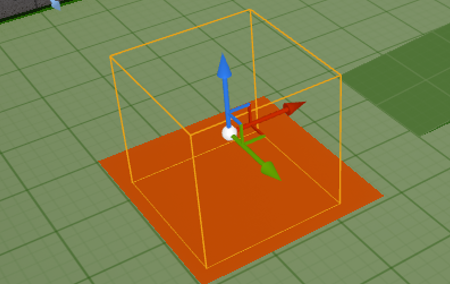
- Area Class Default 설정이 Null로 설정되어 있기 때문인데 Obstacle(장애물)로 설정하면 다음과 같이 보인다.
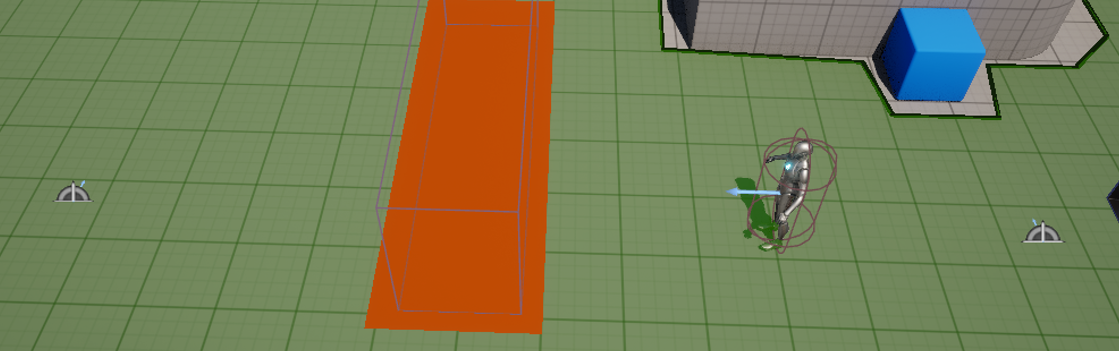
- 장애물을 피해서 경로를 탐색하는 것을 확인하기 위해 다음과 같이 액터들을 배치해보았다. (Target Point)
이후 C++ 코드에서 TargetPoint를 찾아서 이동하는 로직 추가
2️⃣ Use Pathfinding Algorithm
MoveToLocation, MoveToActor 함수를 통해 언리얼의 Pathfinding Algorithm을 사용할 수 있다.
World에서 TargetPoint를 찾고 Destination을 bIsSucceeded 값의 토글을 통해 전환하도록 로직을 설계되었다.
세부로직은 다음과 같다.
📌 C++ 이동 로직 추가
📋 AI_TestCharacter.h
// 헤더 추가
#include "AIController.h"
#include "Engine/TargetPoint.h"
.
.
.
public:
// Property and Function about AI Modifier Test
UPROPERTY(EditAnywhere, BlueprintReadWrite, Category = "AI Movement")
bool bIsSucceeded;
UPROPERTY(EditAnywhere, BlueprintReadWrite, Category = "AI Movement")
AActor* Target;
UPROPERTY(EditAnywhere, BlueprintReadWrite, Category = "AI Movement")
AActor* Target2;
// 이 반경 안으로 들어오면 도착한 것으로 치겠다. 라고 설정하기 위해 만든 Radius
UPROPERTY(EditAnywhere, BlueprintReadWrite, Category = "AI Movement")
float AcceptanceRadius = 50.0f;
UFUNCTION(BlueprintCallable, Category = "AI Movement")
void MoveToTarget();
UFUNCTION()
void OnMoveCompleted(FAIRequestID RequestID, EPathFollowingResult::Type Result);
// Callable at Blueprint - MoveStart
UFUNCTION(BlueprintCallable, Category = "AI Movement")
void StartMoving();
UFUNCTION(BlueprintCallable, Category = "AI Movement")
void FindTargetPoints();
protected:
virtual void BeginPlay() override;
private:
UPROPERTY()
AAIController* AIController;
UPROPERTY()
bool bIsMoving;
};📋 AI_TestCharacter.cpp
// 헤더 추가
#include "Kismet/GameplayStatics.h"
#include "NavigationSystem.h"
#include "Navigation/PathFollowingComponent.h"
AAI_TestCharacter::AAI_TestCharacter()
{
.
.
// AI Modifier Test Initialize
bIsSucceeded = false;
bIsMoving = false;
AcceptanceRadius = 50.0f;
}
void AAI_TestCharacter::BeginPlay()
{
Super::BeginPlay();
// Find AI Controller
AIController = Cast<AAIController>(GetController());
if (AIController)
{
AIController->ReceiveMoveCompleted.RemoveDynamic(this, &AAI_TestCharacter::OnMoveCompleted);
AIController->ReceiveMoveCompleted.AddDynamic(this, &AAI_TestCharacter::OnMoveCompleted);
}
// Find TargetPoint
FindTargetPoints();
StartMoving();
}
void AAI_TestCharacter::NotifyControllerChanged()
{
Super::NotifyControllerChanged();
// Add Input Mapping Context
if (APlayerController* PlayerController = Cast<APlayerController>(Controller))
{
if (UEnhancedInputLocalPlayerSubsystem* Subsystem = ULocalPlayer::GetSubsystem<UEnhancedInputLocalPlayerSubsystem>(PlayerController->GetLocalPlayer()))
{
Subsystem->AddMappingContext(DefaultMappingContext, 0);
}
}
else
{
AIController = Cast<AAIController>(Controller);
if (AIController)
{
AIController->ReceiveMoveCompleted.AddDynamic(this, &AAI_TestCharacter::OnMoveCompleted);
}
}
}
//////////////////////////////////////////////////////////////////////////
// AI Modifier 테스트용 Movement Logic 구현.
void AAI_TestCharacter::FindTargetPoints()
{
// 타겟 포인트가 설정되어 있지 않은 경우 자동으로 찾기
// "||"는 A OR B로 A 혹은 B가 True일 경우 True를 반환하는 논리연산자입니다.
// 여기서는 역논리 연산자가 bool 변수 앞에 붙어있으므로 bool변수가 하나라도 false 일 경우 True로 판정합니다.
if (!Target || !Target2)
{
TArray<AActor*> FoundTargets;
UGameplayStatics::GetAllActorsOfClass(GetWorld(), ATargetPoint::StaticClass(), FoundTargets);
if (FoundTargets.Num() >= 2)
{
Target = FoundTargets[0];
Target2 = FoundTargets[1];
UE_LOG(LogTemplateCharacter, Display, TEXT("Found TargetPoints: %s and %s"),
*Target->GetName(), *Target2->GetName());
}
else
{
UE_LOG(LogTemplateCharacter, Warning, TEXT("Not enough TargetPoints found in the level, need at least 2!"));
}
}
}
void AAI_TestCharacter::StartMoving()
{
// 타겟 포인트를 찾고 이동 시작
FindTargetPoints();
MoveToTarget();
}
void AAI_TestCharacter::MoveToTarget()
{
if (!AIController)
{
UE_LOG(LogTemplateCharacter, Error, TEXT("AIController is not valid! Make sure the character is possessed by an AIController."));
return;
}
if (bIsMoving)
{
// 이미 이동 중이면 중복 호출 방지
return;
}
// IsSucceeded 값에 따라 타겟 선택
AActor* SelectedTarget = bIsSucceeded ? Target : Target2;
if (SelectedTarget)
{
bIsMoving = true;
// AI MoveTo 함수 호출
FVector TargetLocation = SelectedTarget->GetActorLocation();
EPathFollowingRequestResult::Type MoveResult = AIController->MoveToLocation(
TargetLocation,
AcceptanceRadius,
true, // 목적지에 오버랩 되면 도착으로 판정할지 여부.
true, // 경로 찾기 사용
false, // 프로젝션 사용 안함
true // 네비게이션 데이터 사용
);
if (MoveResult == EPathFollowingRequestResult::Failed)
{
UE_LOG(LogTemplateCharacter, Warning, TEXT("Failed to start movement to target!"));
bIsMoving = false;
}
else
{
UE_LOG(LogTemplateCharacter, Display, TEXT("Moving to %s (IsSucceeded: %s)"),
*SelectedTarget->GetName(), bIsSucceeded ? TEXT("True") : TEXT("False"));
}
}
else
{
UE_LOG(LogTemplateCharacter, Error, TEXT("Selected target is not valid! Make sure Target and Target2 are set."));
}
}
void AAI_TestCharacter::OnMoveCompleted(FAIRequestID RequestID, EPathFollowingResult::Type Result)
{
bIsMoving = false;
// 이동 결과에 따라 IsSucceeded 값 토글
if (Result == EPathFollowingResult::Success)
{
// 성공적으로 이동 완료됨
bIsSucceeded = !bIsSucceeded; // 값 토글
UE_LOG(LogTemplateCharacter, Display, TEXT("Move completed successfully. IsSucceeded toggled to: %s"),
bIsSucceeded ? TEXT("True") : TEXT("False"));
// 지연 후 다음 이동 시작
FTimerHandle TimerHandle;
GetWorldTimerManager().SetTimer(TimerHandle, this, &AAI_TestCharacter::MoveToTarget, 0.5f, false);
}
else
{
// 이동 실패
UE_LOG(LogTemplateCharacter, Warning, TEXT("Move failed with result: %d"), static_cast<int32>(Result));
// 실패 시에도 다시 시도
FTimerHandle TimerHandle;
GetWorldTimerManager().SetTimer(TimerHandle, this, &AAI_TestCharacter::MoveToTarget, 1.0f, false);
}
}-
맵에 있는 TargetPoint를 찾아서 토글에 따라 2개의 TargetPoint가 도착지로서 이용된다.
-
EPathFollowingRequestResult는 MoveToLocation 또는 MoveToActor 요청이 유효했는지 결과를 반환한다.EPathFollowingRequestResultnamespace안의 Enum Type이 있음.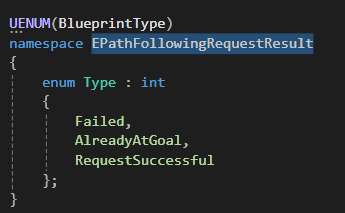
-
AIController는
UPathFollowingComponent를 통해 경로를 따라가고, 도착, 중단, 실패 등의 상황이 발생하면 자동으로ReceiveMoveCompleted를 호출한다.OnOverlap을 생각하면 쉬움- 우리는 앞서 AddDynamic을 통해 OnMoveCompleted를 바인딩했음.
-
ReceiveMoveCompleted을 추적해보면 다음과 같다. -
도착하면
ReceiveMoveCompleted가 호출되고 거기에 바인딩 되어있는OnMoveCompleted을 호출한다.- 언리얼 델리게이트 매크로 문법 : 고정된 매개변수 구조를 요구한다. C++ 처럼 (타입 이름) 으로 쓰면 안되고 하나씩 나누어서 쓴다.
- 따라서 (델리게이터 타입, 인풋1 타입, 변수명, 인풋2 타입, 변수명) 이런식으로 쓴다.
-
인풋파라미터로 들어가는 FPathFollowingResult의 구조체는 다음과 같다.
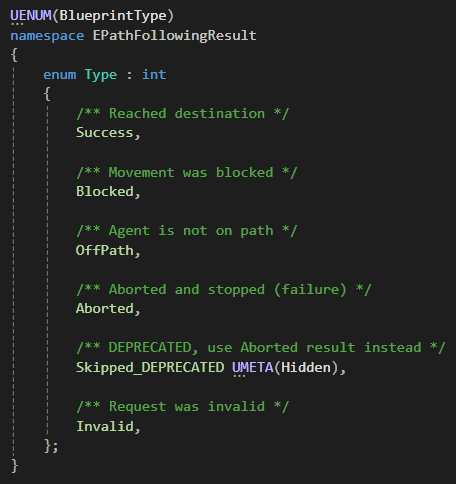
- 따라서 도착결과에 따른 이후 로직으로 확장할 수 있다. 위의 로직에서는 성공하면 0.5초뒤에, 실패하면 1초뒤에 MoveToTarget 호출하도록 함.



📌 적용
- AI로 부터 TargetPoint로 가는 직선거리가 원래 최소 비용이지만 중간에 고비용 obstacle을 생성했으므로 우회해서 돌아가는 걸 유추할 수 있다.
- 실행해보면 다음과 같이 움직이는 것을 확인할 수 있다
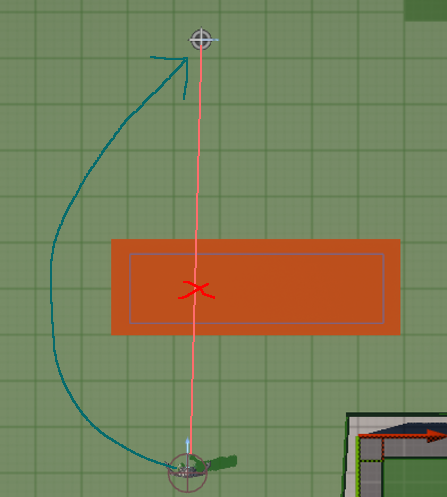
- 좀더 극적인 변화를 관찰하기 위하여 레벨 블루프린트에서 키다운 이벤트를 통해 obstacle이 Target Point 사이에 위치하도록 해보았다.
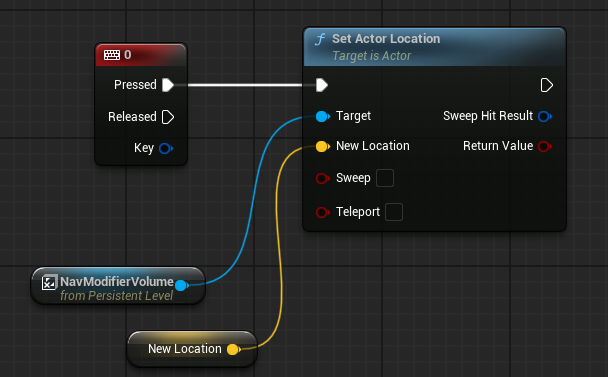
- 또한 Obstacle이 런타임중에 이동이 가능하도록 설정하기 위해 movable로 설정
- 직선으로 이동을하다가 '0' 키를 누르는 순간 obstacle이 위치로 이동되면서 경로가 바뀌는 것을 볼 수 있다.