A* 알고리즘 경로 판단하기
개요
타워 디펜스 게임을 만들던중 3D이므로 NavMesh를 사용하여 적의 움직임을 구현할 수 있으나
타워를 설치할 때마다 적의 이동경로가 변경되게 할 필요가 있었다.
특히 타워를 설치할 때 타워 설치될 공간을 판단하여 경로를 모두 막는지 확인하고
경로를 모두 막고 있다면 설치가 안되게 할 필요가 있었다.
예) 언더 다크

그렇기에 NavMesh와는 별개로 경로를 탐색할 필요가 있었다.
이때 경로가 유효한지는 대각선 이동이 불가능하고 도착지점(기지)까지 이동이 가능한지 판단한다.
A* vs JPS
A와 JPS는 모두 길찾기 알고리즘이다.
A 알고리즘은 경로 기반 그래프를 탐색하며 최단 경로를 찾는다.
휴리스틱을 사용하여 예상 거리를 계산하고 탐색 속도를 개선한다.
JPS(Jump Point Search)는 A 알고리즘을 개선하여 고속화 시킨 알고리즘이다.
A는 모든 방향의 이웃 노드를 탐색하는데 JPS는 노드 탐색을 최소화 시켜
장애물과 같이 중요한 분기점만을 탐색하여 속도가 빠르다.
또한 직선을 빠르게 탐색할 수 있어 속도가 빠르다.
A와 JPS를 비교하였을 때는 JPS가 더 빠르지만
해당 프로젝트는 대각선 이동이 불가능하므로 A 알고리즘을 사용한다.
A* 알고리즘 코드
경로 자체를 반환하는 것이 아니라 "길이 존재하는가?" 여부만 빠르게 확인하고자 하여 만들었다.
-
사전조건
-
정수 배열 tileMap[x, y]은 2D 타일 맵을 나타낸다.
-
타일의 값이 2이면 벽 또는 통과 불가한 타일로 간주한다.
-
대각선 이동은 허용하지 않고, 네 방향(상/하/좌/우)만 이동 가능하다.
-
start와 end는 각각 시작 지점과 목표 지점이다.
public static int Heuristic(Vector2Int a, Vector2Int b)
{
return Mathf.Abs(a.x - b.x) + Mathf.Abs(a.y - b.y);
}
// 경로가 존재하는지 검사, a*
public bool FindPathAStar(Vector2Int start, Vector2Int end)
{
int width = tileMap.GetLength(0);
int height = tileMap.GetLength(1);
HashSet<Vector2Int> closeSet = new HashSet<Vector2Int>();
PriorityQueue<Vector2Int> openSet = new PriorityQueue<Vector2Int>();
// 출발점
openSet.Enqueue(start, 0);
Dictionary<Vector2Int, int> gScore = new Dictionary<Vector2Int, int>
{
[start] = 0
};
Vector2Int[] directions = new Vector2Int[]
{
Vector2Int.up, Vector2Int.down, Vector2Int.left, Vector2Int.right
};
while (openSet.Count > 0)
{
Vector2Int current = openSet.Dequeue();
if (current == end)
{
// 도착 지점 도착
return true;
}
closeSet.Add(current);
foreach (var dir in directions)
{
// 방향에 따른 탐색 지점
Vector2Int neighbor = current + dir;
// 범위 조건 확인
if (neighbor.x < 0 || neighbor.x >= width || neighbor.y < 0 || neighbor.y >= height)
{
continue;
}
// 벽인지 확인
if (tileMap[neighbor.x, neighbor.y] == 2 || closeSet.Contains(neighbor))
{
continue;
}
// 거리 비교하여 추가
int tentativeG = gScore[current] + 1;
if (!gScore.ContainsKey(neighbor) || tentativeG < gScore[neighbor])
{
gScore[neighbor] = tentativeG;
int fScore = tentativeG + Heuristic(neighbor, end);
openSet.Enqueue(neighbor, fScore);
}
}
}
return false; // 경로 없음
}핵심 포인트
- 휴리스틱 함수를 사용하여 빠른 탐색을 하도록한다.
- 우선 순위 큐를 통해 가장 가능성이 높은 노드를 먼저 탐색하도록한다.
- 탐색중 도착지점에 도착하면 바로 true를 반환하여 경로가 존재한다고 반환한다.
위 코드는 원래의 A* 알고리즘에서 경로를 반환하지 않고 경로의 존재 여부만 반환한다.
만약 경로가 필요하다면 추가적인 작업이 필요하다.
결과
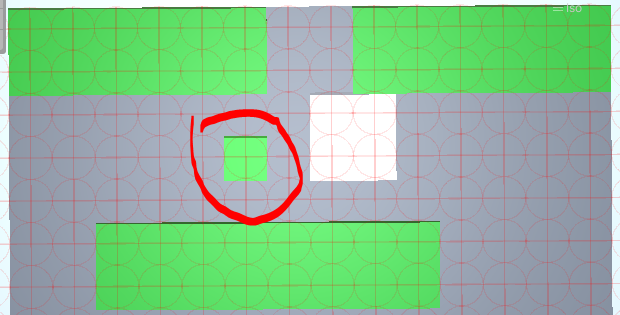
(블록을 놓은 모습)
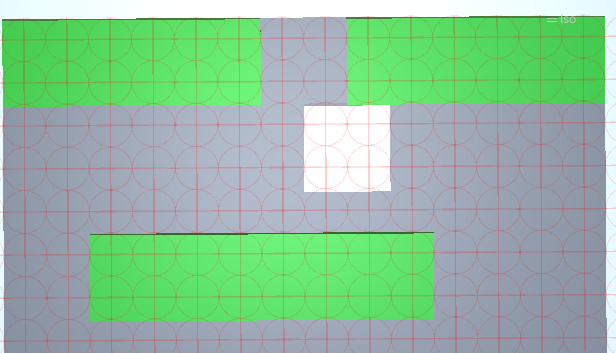
(경로가 존재하면서 초록색으로 보이는 모습)
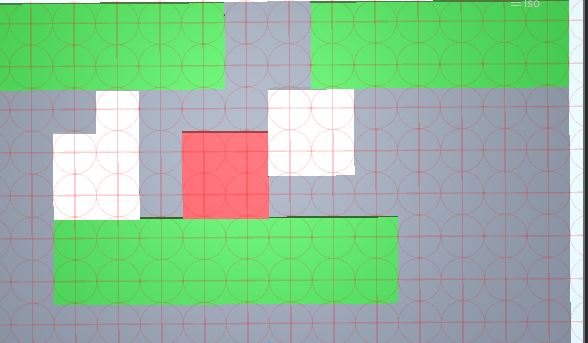
(입구를 막아 경로가 없으면 붉은 색으로 보이는 모습)