Spanning Graph = 모든 노드를 포함하는/연결하는 부분 그래프
Spanning Tree = 트리이므로 Spanning Graph - Cycle
즉, 임의의 그래프에서 사이클이 없고 모든 노드를 포함하도록 간선을 일부 선택하여 만든 부분 그래프를 의미한다.
Minimum Spanning Tree = Spanning Tree 중 가중치가 최소인 그래프
Kruskal, Prim 두 알고리즘 예제로는 프로그래머스 섬 연결하기 문제를 선택했다.
두 알고리즘 모두 무방향 가중치 연결 그래프를 전제로 한다.
Kruskal
크루스칼 알고리즘은 간선 중심으로 설계 관점에서 그리디이다.
- 모든 간선을 포함한 집합에서 가중치가 작은 순서대로 확인하며 포함
- 사이클을 생성하지 않으면 포함
- 사이클을 생성하면 제외
- 모든 간선을 포함한 상태에서 가중치가 큰 순서대로 확인하며 제외
- 해당 간선을 제외했을 때 그래프를 둘로 분리하지 않으면 제거
n-1개의 변이 남을 때까지 반복 (사이클을 생성하지 않으려면n-1개의 변이 필요하다.)
1.을 기준으로 로직을 간단히 적어보면 다음과 같다.
로직
- 모든 간선을 포함한 집합 S를 준비한다.
- S에서 가중치가 작은 순서대로 확인한다.
- 해당 간선이 사이클을 생성하면 제외한다.
- 그렇지 않으면 해당 간선을 포함한다.
- S에 간선이 남지 않을 때까지 (n-1개의 간선이 포함될 때까지) 2. 를 반복한다.
섬 연결하기 문제를 예시로 들자면
-
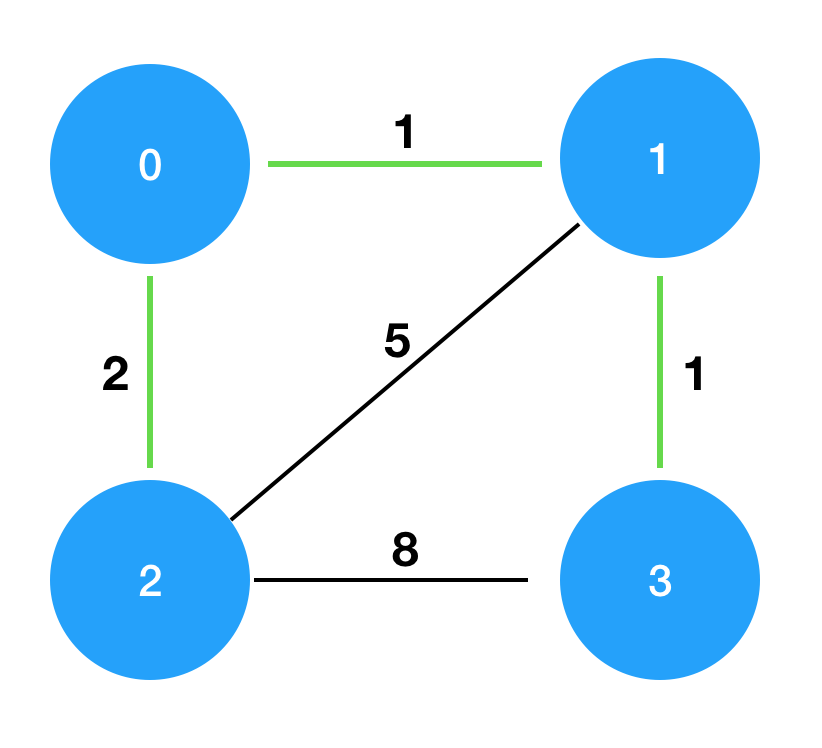
[[0,1,1],[0,2,2],[1,2,5],[1,3,1],[2,3,8]] 가중치 순으로 정렬 또는 우선순위큐에 삽입
➡️ [[0,1,1], [1,3,1], [0,2,2], [1,2,5], [2,3,8]] 순서대로 확인 -
[0,1,1]- 포함 ➡️[1,3,1]- 포함 ➡️[0,2,2]- 포함
➡️[1,2,5]- 제외 ➡️[2,3,8]- 제외
(n-1개의 간선을 포함하면 중지해도 된다.)
알고리즘은 간단하지만 사이클을 갖지 않는다는 점을 효율을 챙기면서 코드로 확인하기는 쉽지 않다.
#include <string>
#include <vector>
#include <iostream>
#include <algorithm>
using namespace std;
vector<int> island(101);
bool cmp(vector<int> a, vector<int> b){
return a[2] < b[2];
}
int findParent(int idx){
if(island[idx] == idx)
return idx;
return island[idx] = findParent(island[idx]);
}
int solution(int n, vector<vector<int>> costs) {
int answer = 0;
//섬 저장
for(int i=0; i<n; i++){
island[i] = i;
}
// 1. 비용이 적은순으로 정렬
sort(costs.begin(), costs.end(), cmp);
for(int i=0; i<costs.size(); i++){
int start = findParent(costs[i][0]);
int end = findParent(costs[i][1]);
int cost = costs[i][2];
//2. cycle이 만들어지지 않으면 다리 추가
if(start!=end){
answer+=cost;
island[end] = start;
}
}
return answer;
}최적은 이며 도 가능하다.
코드 출처: [프로그래머스] 섬 연결하기 (C++)
Prim
프림 알고리즘은 정점 중심으로 설계 관점에서 그리디이다.
로직
- 모든 간선을 포함한 집합 S1를과 빈 집합 S2를 준비한다.
- 임의의 정점을 선택하여 방문 처리하고 S2에 삽입한다.
- S2에 있는 정점 중 방문하지 않은 정점 중에서 가장 낮은 가중치의 간선을 갖는 정점을 선택한다.
- 해당 정점을 방문 처리하고 지금까지 방문한 정점에 연결된 간선들을 비교하여 3. 수행을 반복한다.
- 모든 정점이 방문 처리될 때까지 3. 을 반복한다.
3-a. 에서 현재까지 방문한 모든 정점에 연결된 간선들의 가중치를 비교하면서 지속적으로 원소 삽입과 정렬이 이루어지기 때문에 우선순위 큐를 활용하면 시간복잡도가 효율적이다.
정점 0 선택 ➡️ 우선순위 큐에 (1, 1), (2, 2) 삽입 ⚡[(1, 1), (2, 2)]
➡️ 정점 1 선택 ➡️ 우선순위 큐에 (2, 5), (3, 1) 삽입 ⚡[(3, 1), (2, 2), (2, 5)]
➡️ 정점 3 선택 ➡️ 우선순위 큐에 (2, 8) 삽입 ⚡[(2, 2), (2, 5), (2, 8)]
➡️ 정점 2 선택 ➡️ 모든 정점 선택 완료하여 종료
#include <string>
#include <vector>
#include <queue>
using namespace std;
int solution(int n, vector<vector<int>> costs) {
int answer = 0, v = 0, node = 0, c = 0;
priority_queue<pair<int, int>, vector<pair<int, int>>, greater<pair<int, int>>> pq; // 가중치, 정점
vector<bool> visited(n, false);
vector<int> a(n, -1);
vector<vector<int>> adj(n, a);
if(n == 1)
return 0;
for(auto c:costs){
adj[c[0]][c[1]] = c[2];
adj[c[1]][c[0]] = c[2];
}
pq.push({0, 0});
while(v < n){
c = pq.top().first;
node = pq.top().second;
pq.pop();
if(visited[node])
continue;
visited[node] = true;
v++;
answer += c;
for(int i=0; i<n; i++){
if(adj[node][i] > 0 && !visited[i])
pq.push({adj[node][i], i});
}
}
return answer;
}반복문이 최대 만큼 돌고 우선순위 큐 삽입에 만큼이 필요하다.
위의 풀이는 인접리스트를 사용하여 극단적인 경우에 효율적이지 않다. 위의 시간복잡도를 맞추기 위해서는 다른 방법을 활용하여 한 정점에 연결된 간선을 저장해두어야 한다.
참고로 배열을 활용하는 경우에는 O(V^2) 의 시간복잡도를 가진다.
Kruskal vs Prim vs Dijkstra
Kruskal: MST를 간선 중심으로 찾는 알고리즘
Prim: MST를 정점 중심으로 찾는 알고리즘
Dijkstra: 하나의 시작 노드에서 다른 노드까지의 최소 비용을 찾는 알고리즘
Dijkstra는 모든 노드를 거쳐갈 필요가 없다. 시작 노드 → 끝 노드 까지의 최소 비용이 목적이다.
Kruskal과 Prim은 모든 노드를 포함하는 그래프(트리)의 최소 비용을 구하는 것이 목적이다. 어차피 모든 노드를 포함해야하니까 임의의 노드에서 탐색을 시작해도 돼서 시작 노드가 정해져있지 않다.
