1. 실천 방법: GPT의 대답
- 카메라의 intrinsic 파라미터를 정확하게 구하기(카메라 캘리브레이션)이라고 부름
- 이 과정을 통해 얻어진 카메라 매트릭스(mtx)와 왜곡 계수(dist)는 카메라의 intrinsic 파라미터를 의미
- 이 파라미터들은
이미지 왜곡 보정, 3D 포인트 복원 등 다양한 컴퓨터 비전 작업에 필수적 - 아래에 그 절차를 단계별로 자세히 설명
1.1. 준비물 및 환경 설정
- 카메라: 캘리브레이션할 카메라.
- 캘리브레이션 보드: 일반적으로 체스보드 패턴이 사용
- 소프트웨어 도구: OpenCV 라이브러리를 사용하는 것이 일반적입니다. Python을 추천합니다.
- 고정된 환경: 조명이 일정하고 움직임이 없는 환경.
1.2. 캘리브레이션 보드 준비
- 체스보드 패턴의 크기를 결정합니다.
- 예를 들어, 9x6 (내부 코너 기준) 보드를 사용할 수 있습니다.
- 보드를 평평하고 균일하게 인쇄하고, 단단한 표면에 부착
1.3. 이미지 캡처
- 캘리브레이션 보드를
다양한 각도와 거리에서 촬영- 보드는 여러 위치와 각도에서 충분히 촬영되어야 함
- 각 이미지에서 보드의 전체 패턴이 포함되도록 촬영해야 함
4. 코너 검출
-
코너 검출 알고리즘: OpenCV의
findChessboardCorners함수를 사용합니다. -
코드 예시:
import cv2 import numpy as np # 체스보드 크기 chessboard_size = (9, 6) # 객체 포인트와 이미지 포인트 저장할 배열 objpoints = [] imgpoints = [] # 체스보드 패턴 생성 objp = np.zeros((np.prod(chessboard_size), 3), np.float32) objp[:, :2] = np.mgrid[0:chessboard_size[0], 0:chessboard_size[1]].T.reshape(-1, 2) # 이미지 로드 images = [...] # 캘리브레이션 이미지 파일 리스트 for image in images: img = cv2.imread(image) gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) ret, corners = cv2.findChessboardCorners(gray, chessboard_size, None) if ret: objpoints.append(objp) imgpoints.append(corners) # 코너를 이미지에 그립니다. cv2.drawChessboardCorners(img, chessboard_size, corners, ret) cv2.imshow('img', img) cv2.waitKey(500) cv2.destroyAllWindows()
5. 카메라 캘리브레이션 수행
-
캘리브레이션 함수:
cv2.calibrateCamera를 사용하여 intrinsic 파라미터를 구합니다. -
코드 예시:
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None) # 결과 출력 print("Camera matrix:\n", mtx) print("Distortion coefficients:\n", dist)
6. 결과 검증
-
캘리브레이션이 잘 되었는지 확인하기 위해 몇 가지 검증 단계를 거칩니다.
-
리프로젝션 에러 계산:
mean_error = 0 for i in range(len(objpoints)): imgpoints2, _ = cv2.projectPoints(objpoints[i], rvecs[i], tvecs[i], mtx, dist) error = cv2.norm(imgpoints[i], imgpoints2, cv2.NORM_L2)/len(imgpoints2) mean_error += error print("Total error: ", mean_error/len(objpoints))
7. 보정된 이미지 확인
-
캘리브레이션된 파라미터를 사용하여 왜곡 보정된 이미지를 확인합니다.
-
코드 예시:
img = cv2.imread(images[0]) h, w = img.shape[:2] newcameramtx, roi = cv2.getOptimalNewCameraMatrix(mtx, dist, (w, h), 1, (w, h)) # 왜곡 보정 dst = cv2.undistort(img, mtx, dist, None, newcameramtx) # 결과를 자르고 저장 x, y, w, h = roi dst = dst[y:y+h, x:x+w] cv2.imwrite('calibresult.png', dst)
- https://docs.opencv.org/4.x/dc/dbb/tutorial_py_calibration.html
- http://www.gisdeveloper.co.kr/?p=6868
- https://foss4g.tistory.com/1665
코드 레벨에서 구하기
1. cv2.findChessboardCorners 메서드
1. 알고리즘 작동 원리:
cv2.findChessboardCorners는 체스보드 패턴에서 코너를 찾는 함수입니다.
- 이 함수는 입력 이미지에서 명확한 코너를 감지하여,
- 이를 사용자가 지정한 패턴 크기 (예: 7x6)와 맞추려고 시도합니다.
알고리즘은 다음 단계를 거칩니다:
1. 그레이스케일 변환:
- 이미지를 그레이스케일로 변환합니다 (이미 그레이스케일인 경우 생략).
- 코너 감지:
- 이미지를 여러 스케일로 변환하여 코너를 감지합니다.
- 이를 통해 각 스케일에서 코너 후보를 찾습니다.
- 패턴 맞추기:
- 감지된 코너 후보를 사용자가 지정한 체스보드 패턴 크기에 맞춰 정렬
- 정제:
- 패턴이 맞춰지면, 서브픽셀 정확도로 코너 위치를 정제
2. 파라미터의 의미:
- image: 코너를 찾을 입력 이미지. 일반적으로 그레이스케일 이미지로 제공됩니다.
- patternSize:
- 체스보드 패턴의 내부 코너 개수
(열, 행) 쌍으로, - 예를 들어 (7, 6)은 7개의 열과 6개의 행을 의미합니다.
- 체스보드 패턴의 내부 코너 개수
- corners:
- 코너를 찾았을 때 코너의 위치를 저장할 배열.
- 함수 호출 시에는
None으로 전달
- flags:
- 추가 옵션을 지정할 수 있는 플래그.
- 기본적으로는
None으로 설정되며, 다양한 설정 값을 지정할 수 있습니다.
3. 반환 값의 의미:
- ret:
- 체스보드 코너를 성공적으로 찾았는지 여부를 나타내는 불리언 값.
True이면 코너를 찾았음을 의미
- corners:
- 체스보드 코너의 좌표를 포함하는 배열.
ret이True일 때 유효합니다.
- 체스보드 코너의 좌표를 포함하는 배열.
2. cv2.cornerSubPix 메서드
1. 알고리즘 작동 원리:
cv2.cornerSubPix는 감지된 코너의 위치를 서브픽셀 수준으로 정제- 이를 통해 코너 위치의 정확도를 높임
- 이 함수는 이미지의 그레이디언트를 분석하여 각 코너의 정확한 위치를 결정
- 알고리즘은 다음 단계를 거칩니다:
- 초기화: 초기 코너 위치와 설정된 윈도우 크기, 정확도 기준을 사용하여 서브픽셀 정제 과정을 시작합니다.
- 그레이디언트 계산:
- 코너 주변의 이미지 그레이디언트를 계산하여 코너 위치를 미세하게 조정
- 정제 반복:
- 설정된 반복 횟수 또는 정확도 기준에 도달할 때까지 정제 과정을 반복
2. 파라미터의 의미:
- image: 입력 이미지. 일반적으로 그레이스케일 이미지입니다.
- corners: 초기 코너 위치를 포함하는 배열.
cv2.findChessboardCorners의 출력 값입니다. - winSize:
- 코너 주변을 고려할 윈도우 크기 (예: (11, 11)).
- zeroZone:
- 중앙 영역의 크기를 설정하여 노이즈를 제거하는 데 사용.
- 일반적으로 (-1, -1)로 설정하여 모든 영역을 고려
- criteria:
- 정제 종료 기준.
cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER로 설정하여 최대 반복 횟수와 정확도를 기준으로 정지합니다.
3. 반환 값의 의미:
- corners2:
- 서브픽셀 수준으로 정제된 코너의 위치 배열. 입력된
corners배열의 정제된 버전
- 서브픽셀 수준으로 정제된 코너의 위치 배열. 입력된
3. cv2.drawChessboardCorners 메서드
1. 알고리즘 작동 원리:
cv2.drawChessboardCorners는 체스보드 패턴에서 감지된 코너를 이미지 위에 그리는 함수- 이 함수는, 각 코너를 원이나 점으로 표시하여
- 체스보드 패턴의 감지 결과를 시각적으로 확인할 수 있도록 도와줌
2. 파라미터의 의미:
- image: 코너를 그릴 이미지.
- patternSize:
체스보드 패턴의 내부 코너 개수 (열, 행) 쌍. - corners: 코너의 위치 배열.
cv2.findChessboardCorners나cv2.cornerSubPix의 출력 값입니다. - patternWasFound: 코너가 성공적으로 감지되었는지 여부를 나타내는 불리언 값.
3. 반환 값의 의미:
- 반환 값은 없습니다. 함수는 입력 이미지에 코너를 직접 그립니다.
cv::calibrateCamera 함수
- 여러 캘리브레이션 패턴 뷰에서 카메라의 내부 및 외부 파라미터를 찾습니다.
파라미터
- objectPoints:
- 캘리브레이션 패턴 좌표 공간에서 캘리브레이션 패턴 점의 벡터의 벡터입니다 (예:
std::vector<std::vector<cv::Vec3f>>). - 외부 벡터에는 패턴 뷰의 수만큼 요소가 포함됩니다.
- 각 뷰에서 동일한 캘리브레이션 패턴이 표시되고 완전히 보이면, 모든 벡터는 동일합니다.
- 그러나 부분적으로 가려진 패턴이나 다른 뷰에서 다른 패턴을 사용할 수도 있습니다.
- 그런 경우, 벡터는 다를 것입니다.
- 점은 3D이지만, 사용된 캘리브레이션 패턴이 평면 장치인 경우, 모든 점이 캘리브레이션 패턴의 XY 좌표 평면에 놓이게 됩니다 (따라서 Z 좌표는 0입니다).
- 캘리브레이션 패턴 좌표 공간에서 캘리브레이션 패턴 점의 벡터의 벡터입니다 (예:
- imagePoints:
- 캘리브레이션 패턴 점의 투영 벡터의 벡터
- (예:
std::vector<std::vector<cv::Vec2f>>). imagePoints.size()와objectPoints.size(),- 그리고 각
i에 대해imagePoints[i].size()와objectPoints[i].size()가 같아야 합니다.
- imageSize:
- 카메라 내부 행렬을 초기화하는 데 사용되는 이미지의 크기.
- cameraMatrix:
- 입력/출력 3x3 부동 소수점 카메라 내부 행렬.
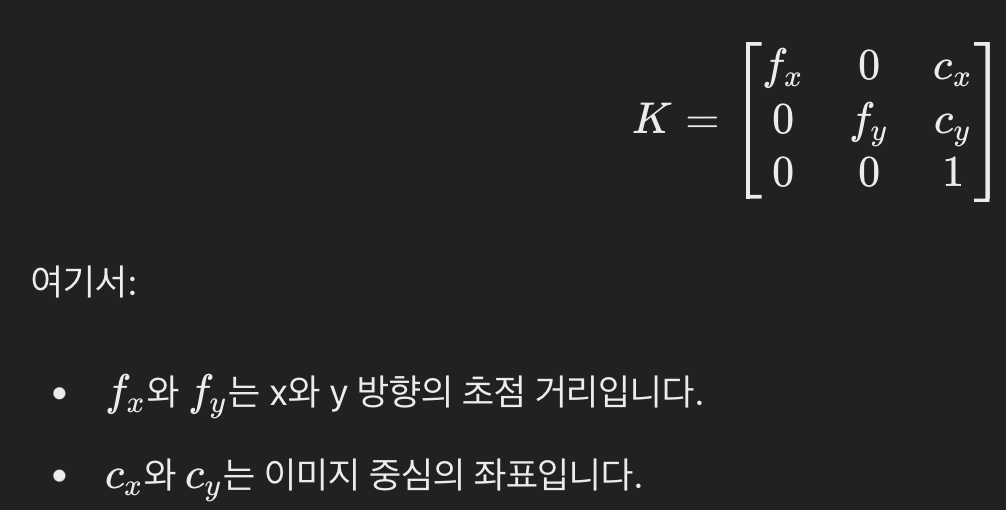
CALIB_USE_INTRINSIC_GUESS및/또는CALIB_FIX_ASPECT_RATIO,CALIB_FIX_PRINCIPAL_POINT또는CALIB_FIX_FOCAL_LENGTH가 지정된 경우, 호출 전에fx,fy,cx,cy의 일부 또는 전부가 초기화되어야 합니다.
- distCoeffs:
- 입력/출력 왜곡 계수 벡터.
- criteria: 반복 최적화 알고리즘의 종료 기준.
- 반환 값:
- ret:
- 전체 Root Mean Square re-projection error
- 이 값은 캘리브레이션 과정의 품질을 나타내며, 낮을수록 더 정확한 캘리브레이션 결과를 의미
- mtx(cameraMatrix):
- (3 , 3) numpy array
- intrinsic matrix
- dist (distCoeffs):
- (5,) shape numpy
[k1, k2, p1, p2, k3]을 포함하며,- 이는 각각 반경 왜곡 계수(k1, k2, k3)와 접선 왜곡 계수(p1, p2)
- rvecs (rotation vectors):
- 각 패턴 뷰에 대한 회전 벡터의 튜플.
- Tuple[np.ndarray]
- 각 뷰에 대한 3x1 회전 벡터로, 월드 좌표계를 카메라 좌표계로 변환하는 회전을 나타냅니다.
- 이 벡터는 Rodrigues 변환을 통해 회전 행렬로 변환할 수 있습니다.
(array([[ 0.01413114], [ 0.01593625], [-0.00571477]]),)
- tvecs (translation vectors):
- 설명: 각 패턴 뷰에 대한 변환 벡터의 튜플.
- 값의 의미:
- 각 뷰에 대한 3x1 변환 벡터로, 월드 좌표계를 카메라 좌표계로 변환하는 평행 이동을 나타냄
(array([[-3.89025738], [-2.26881858], [ 7.43518093]]),)
- ret:
- 이 함수는 내부 카메라 파라미터 및 각 뷰에 대한 외부 파라미터를 추정
- 알고리즘은 다음 단계를 수행합니다:
- 초기 내부 파라미터를 계산하거나 입력 파라미터에서 읽습니다.
- 왜곡 계수는 초기에는 모두 0으로 설정 (일부
CALIB_FIX_K?가 지정된 경우 제외).
- 내부 파라미터가 이미 알려진 것처럼 초기 카메라 포즈를 추정
- 재투영 오차, (re-projection error)
- 즉
- 관찰된 특징점
imagePoints와 - 투영된 (현재 카메라 파라미터와 포즈를 사용한) 객체 점
objectPoints간의 - 거리 제곱합을 최소화하는 글로벌 Levenberg-Marquardt 최적화 알고리즘을 실행
- 관찰된 특징점
- 자세한 내용은
projectPoints를 참조하십시오.
참고:
- 비정방형 (즉, 비 N x N) 그리드를 사용하고
findChessboardCorners로 캘리브레이션을 수행하며,calibrateCamera가 잘못된 값을 반환하는 경우 (왜곡 계수가 0이고,cx및cy가 이미지 중심에서 매우 멀리 떨어져 있으며,fx와fy간의 큰 차이 (비율이 10:1 이상)),patternSize=cvSize(rows, cols)대신patternSize=cvSize(cols, rows)를 사용하고 있는지 확인하십시오.
- 이 함수는 지원되지 않는 파라미터 조합이 제공되거나 시스템이 제약이 있는 경우 예외를 발생시킬 수 있음
- 이제 이미지의 왜곡을 제거할 수 있는데, OpenCV에서는 2가지 방법을 제공합니다.
- 그러나 먼저 왜곡을 제거하기에 앞서
cv2.getOptimalNewCameraMatrix()함수를 사용하여카메라 메트릭스(intrinsic)를 개선할 수 있음 - 이 함수는 또한 결과를 자르는데 사용할 수 있는 이미지 ROI를 반환
- 13개의 샘플 이미지 중
왜곡 현상을 제거할 하나를 사용해 이미지의 크기를 얻고,카메라 메트릭스(intrinsic)를 얻는 코드는 다음과 같습니다.
img = cv2.imread('./data/chess/left12.jpg')
h, w = img.shape[:2]
newcameramtx, roi=cv2.getOptimalNewCameraMatrix(mtx,dist,(w,h),1,(w,h))cv::getOptimalNewCameraMatrix 함수
- 자유 스케일링 파라미터(alpha)를 기반으로, 최적의 새로운 카메라 내부 행렬(intrinsic)을 반환
- 알파가 0보다 클 때, 왜곡 보정된 결과는,
- 캡처된 왜곡 이미지 밖의 "가상" 픽셀에 해당하는 일부 검은 픽셀을 가질 가능성이 있습니다.
- 원본 카메라 내부 행렬, 왜곡 계수, 계산된 새로운 카메라 내부 행렬 및 새로운 이미지 크기는
initUndistortRectifyMap에 전달되어remap용 맵을 생성
파라미터
- cameraMatrix: 입력 카메라 내부 행렬.
- distCoeffs: 입력 왜곡 계수 벡터. 벡터가 NULL/비어 있으면, 왜곡 계수가 0으로 간주
- imageSize: 원본 이미지 크기.
- alpha:
- 자유 스케일링 파라미터로, 0~1 사이
- 0
- 원본 이미지의 유효한 픽셀만, 보정된 이미지로 가져오기
- 원본 이미지의 원치않는 픽셀을 최소로 갖는 보정된 이미지가 얻어지는데,
- 원본 이미지의 코너 지점의 픽셀들이 제거될 수도 있음
- 왜곡 보정된 이미지의 모든 픽셀이 유효한 pixel임
- 1
- 원본 이미지의 모든 픽셀은, 보정된 이미지에 유지됩니다.
- (
원본 이미지의 모든 픽셀이왜곡 보정된 이미지에 유지)
- 자세한 내용은
stereoRectify를 참조 - https://docs.opencv.org/4.x/d9/d0c/group__calib3d.html#ga7a6c4e032c97f03ba747966e6ad862b1
- newImgSize:
- 보정 후 이미지 크기. 기본값은
imageSize로 설정됩니다.
- 보정 후 이미지 크기. 기본값은
반환 값
- new_camera_matrix:
출력되는 새로운 카메라 intrinsic 행렬.- np.ndarray (3, 3)
- validPixROI:
- 선택적 출력 사각형으로,
왜곡 보정된 이미지에서 모든 유효 픽셀 영역을 둘러싼 사각형 - Tuple[int]
- (x, y, w, h)
- (14, 12, 3997, 2995)
- 선택적 출력 사각형으로,
왜곡 제거하기
- 위에서 왜곡을 제거하는 방법이 OpenCV에서는 2가지를 제공한다고 했는데, 첫번재는 다음과 같습니다.
dst = cv2.undistort(img, mtx, dist, None, newcameramtx)
x,y,w,h = roi
dst = dst[y:y+h, x:x+w]
cv2.imwrite('calibresult.png',dst)cv::undistort 함수
- 렌즈 왜곡을 보정하기 위해 이미지를 변환
- 이 함수는 반경 및 접선 렌즈 왜곡을 보정하기 위해 이미지를 변환
- 이 함수는 아래 2개의 조합
initUndistortRectifyMap(단위 행렬 R을 사용)remap(쌍선형 보간법을 사용)
- 수행되는 변환의 세부 사항은
initUndistortRectifyMap함수를 참조 - 원본 이미지에서 해당 픽셀이 없는 대상 이미지의 픽셀은 0 (검은색)으로 채워짐
- 수정된 이미지에서 보일 원본 이미지의 특정 하위 집합은
newCameraMatrix로 조정할 수 있습니다. 카메라 행렬및왜곡 파라미터는calibrateCamera를 사용하여 결정할 수 있음- 이미지의 해상도가 캘리브레이션 단계에서 사용된 해상도와 다른 경우,
fx와fy,cx와cy는 각각 스케일링되어야 하며, 왜곡 계수는 동일하게 유지됨
- 이 함수는 원본 이미지의 왜곡을 보정하여, 출력 이미지로 변환
- 보정된 이미지에서 원본 이미지의 특정 하위 집합을 보이게 하려면
newCameraMatrix를 사용할 수 있음
파라미터
- src: 입력 (왜곡된) 이미지.
- dst: 출력 (보정된) 이미지로, src와 동일한 크기 및 유형을 가집니다.
- cameraMatrix: 입력 카메라 행렬.
- distCoeffs:
- 4, 5, 8, 12 또는 14 요소의 왜곡 계수 벡터.
- 벡터가 NULL/비어 있으면, 왜곡 계수는 0으로 간주됨
- newCameraMatrix:
- 왜곡된 이미지의 카메라 행렬.
- 기본값은
cameraMatrix와 동일하지만, 다른 행렬을 사용하여 결과를 추가로 스케일링하고 이동시킬 수 있음
반환 값
- dst: 출력 (보정된) 이미지.
- 위와 동일한 결과를 제공하는 또 다른 방법은 다음과 같습니다.
mapx,mapy = cv2.initUndistortRectifyMap(mtx,dist,None,newcameramtx,(w,h),5)
dst = cv2.remap(img, mapx, mapy, cv2.INTER_LINEAR)
x,y,w,h = roi
dst = dst[y:y+h, x:x+w]
cv2.imwrite('calibresult.png',dst)왜곡 제거: 이미지의 프로젝션- 이 왜곡 제거 시 수행된 프로젝션에 발생하는 오차가 얼마인지를 알기 위해
cv2.projectPoints()함수가 사용 - 결과적으로 얻어지는 값이 0에 가까울수록 정확한 것
tot_error = 0
for i in range(len(objpoints)):
imgpoints2, _ = cv2.projectPoints(objpoints[i], rvecs[i], tvecs[i], mtx, dist)
error = cv2.norm(imgpoints[i],imgpoints2, cv2.NORM_L2)/len(imgpoints2)
tot_error += error
print("total error: ", tot_error/len(objpoints))
모든 의사 결정 과정을 지나칠 정도로 모두 기록하고, 나중에 스스로 피드백 하는 것