camera
1.Camera FOV&Resolution&Focal Length 간 관계

2.Depth camera to BEV voxel map.
depth map → camera xyz coord → world xyz coord로 바꾸기world xyz coord 를 voxel mapping을 통해 visualize 하고, class 마다 점의 색깔을 달리해서 표시해보기카메라가 실제로 커버할 수 있는 범위가 어
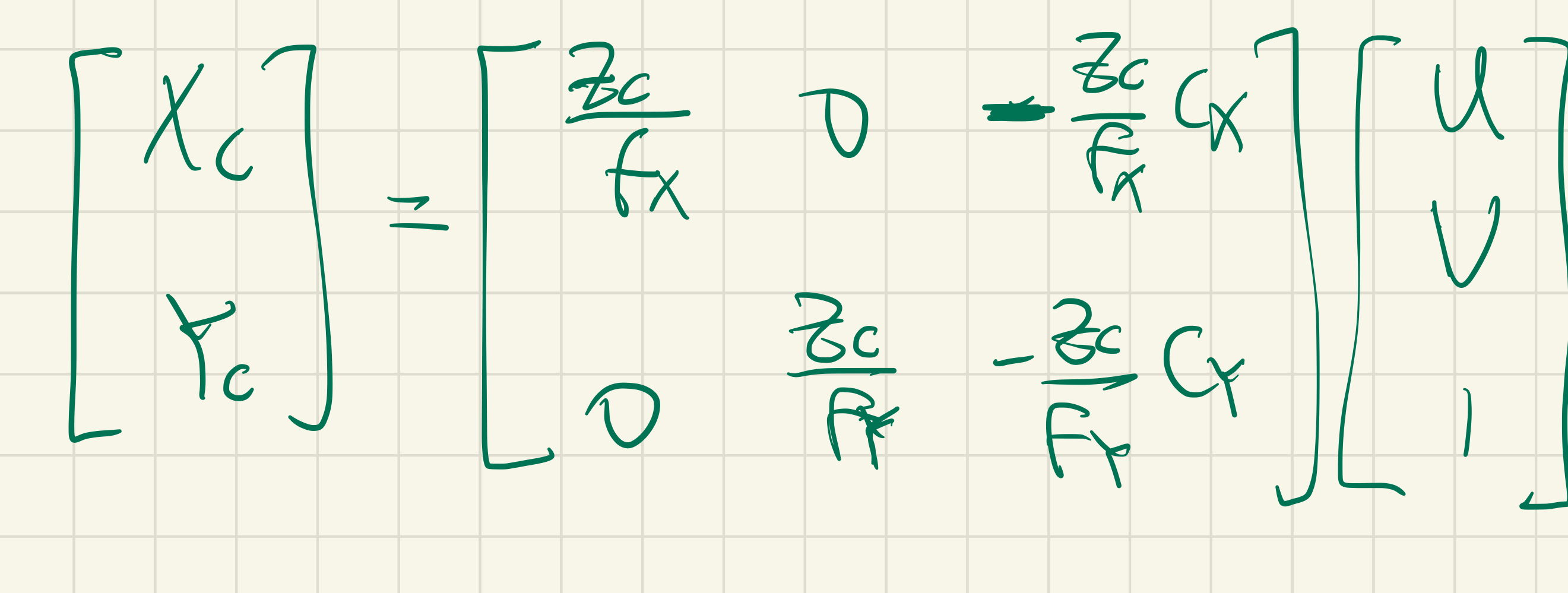
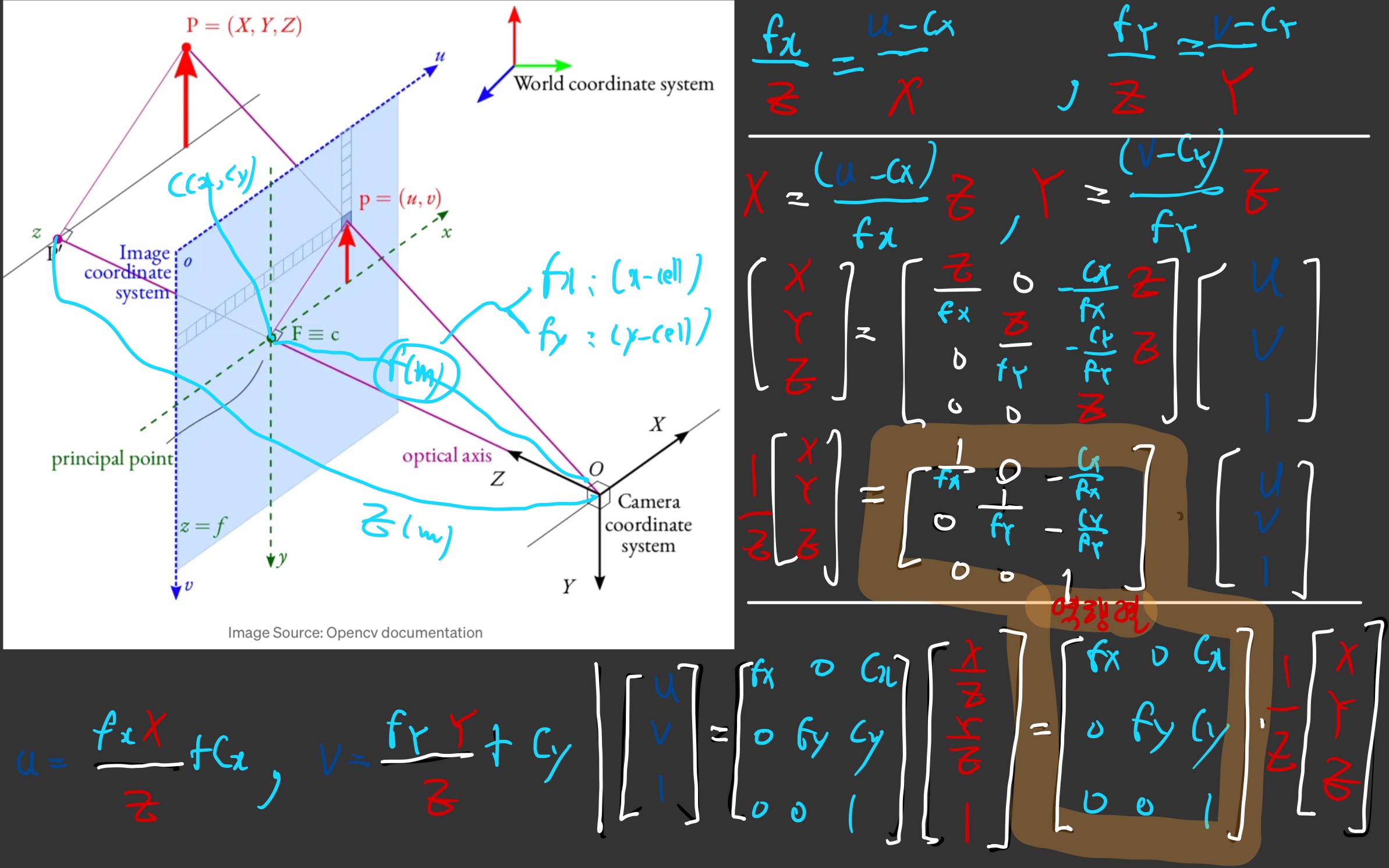
3.카메라 이미지 pixels -> world xyz coordinates
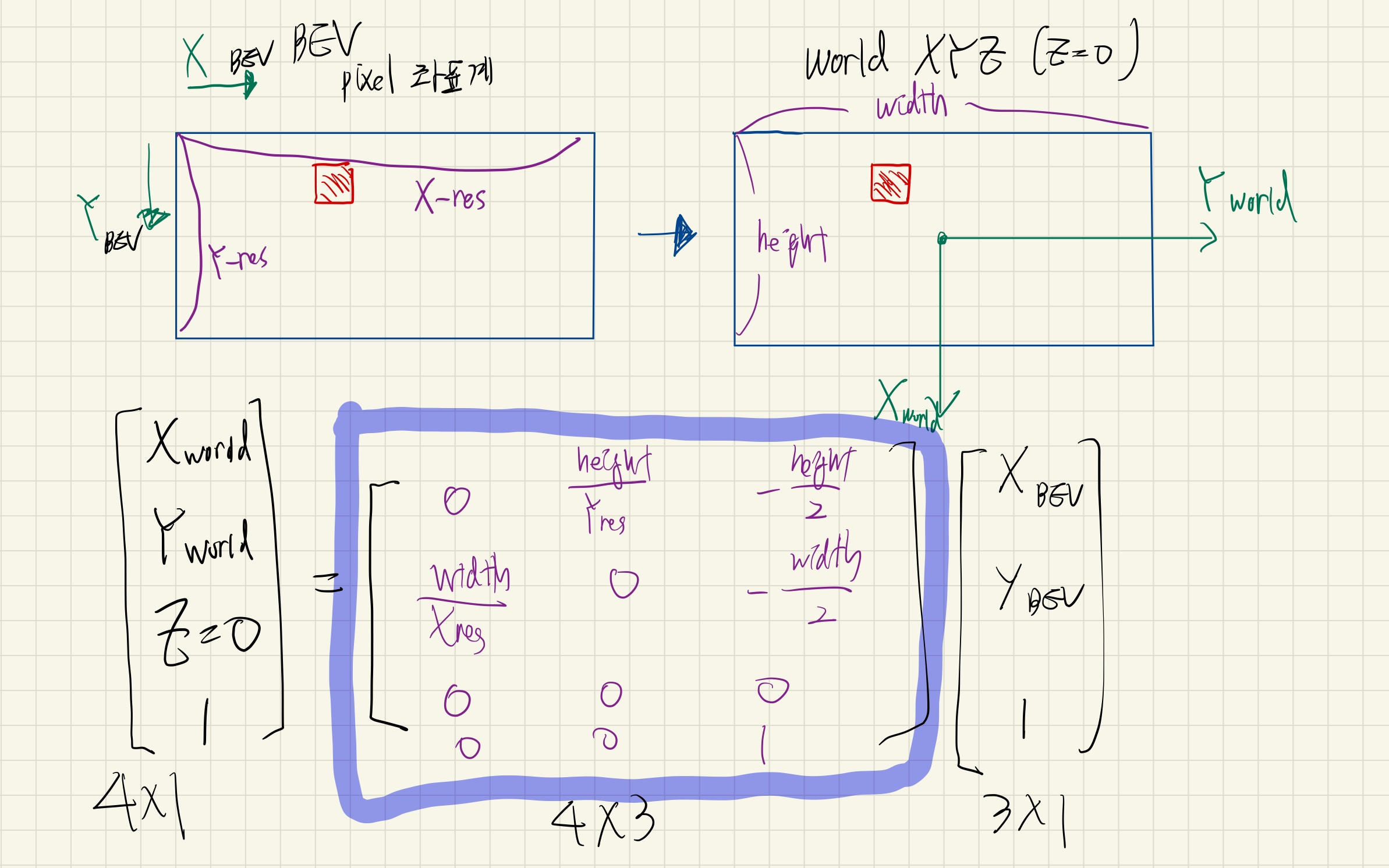
카메라 이미지 pixels의 모든 depth가 0이라고 가정위 가정을 바탕으로 카메라 이미지 pixels -> world xyz coordinates방법론BEV map 픽셀 → 카메라 이미지 픽셀 하는 matrix를 구한 뒤 inverse 취해주는 방식Matrix_1(
4.cv2.warpPerspective
cv2.warpPerspective 함수는 이미지의 투시 변환(perspective transformation)을 수행할 때 사용이 함수는 이미지를 변환하기 위한 3x3 변환 행렬(M)을 사용하여, 소스 이미지에서 목표 이미지로 픽셀을 재배치변환 행렬 구하기: 먼저,
5.Intrinsic/Extrinsic Matrix / IPM 완벽 정리
절대 좌표계(흰색)에서, 센서 좌표계(빨간색)로 옮기는 과정 = 아래 왼쪽R(roll)\*R(pitch)\*R(yaw)의 inverse 행렬이 필요센서 좌표계(빨간색)에서, 절대 좌표계(흰색)로 옮기는 과정 = 아래 오른쪽R(roll)\*R(pitch)\*R(yaw)
6.[code level] [opencv] 카메라 intrinsic 정확히 구하기!
이론적으로는 투영 변환, 왜곡 모델링, 최적화 문제를 포함카메라 렌즈는 보통 다음과 같은 두 가지 왜곡을 가집니다:방사 왜곡 (Radial Distortion): 직선이 곡선으로 보임탄젠트 왜곡 (Tangential Distortion): 렌즈가 완벽하게 평행하지 않을
7.카메라의 왜곡
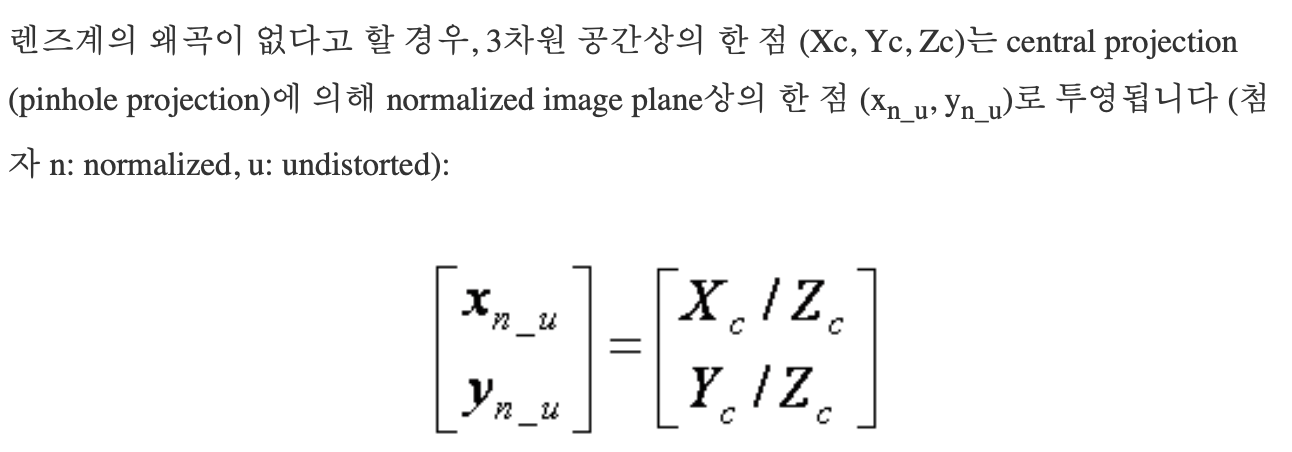
방사 왜곡(Radial Distortion)은 카메라 렌즈에서 발생하는 비선형 왜곡 현상으로, 이미지를 촬영할 때 직선이 휘어져 보이는 현상이 왜곡은 특히 렌즈의 중심에서 멀어질수록 더 뚜렷하게 나타납니다.방사 왜곡은 렌즈의 구조적 특성과 빛의 굴절 원리에 의해 발생하
8.[240726] Camera Calibration
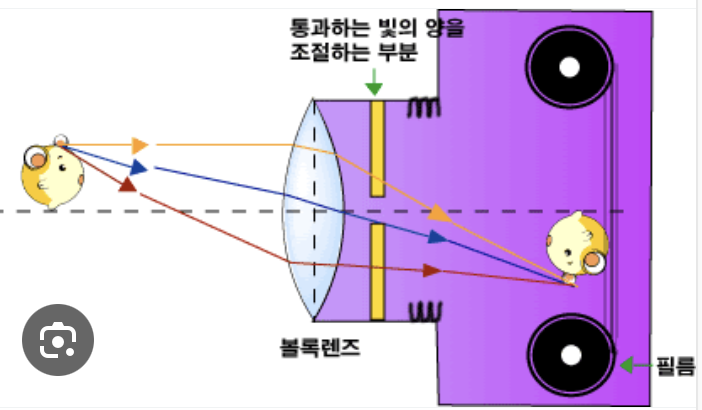
쉽게 이해하고 싶으면: https://www.youtube.com/watch?v=3fjLRebuxBg위 그림은 피사체에 초점을 잘 맞춰서, 피사체의 한 점이, 이미지센서(필름)의 정확히 한 점에 모이는 경우이다.초점을 잘 맞춘다?: (카메라 렌즈와 이미지 센서
9.camera calibration 이론
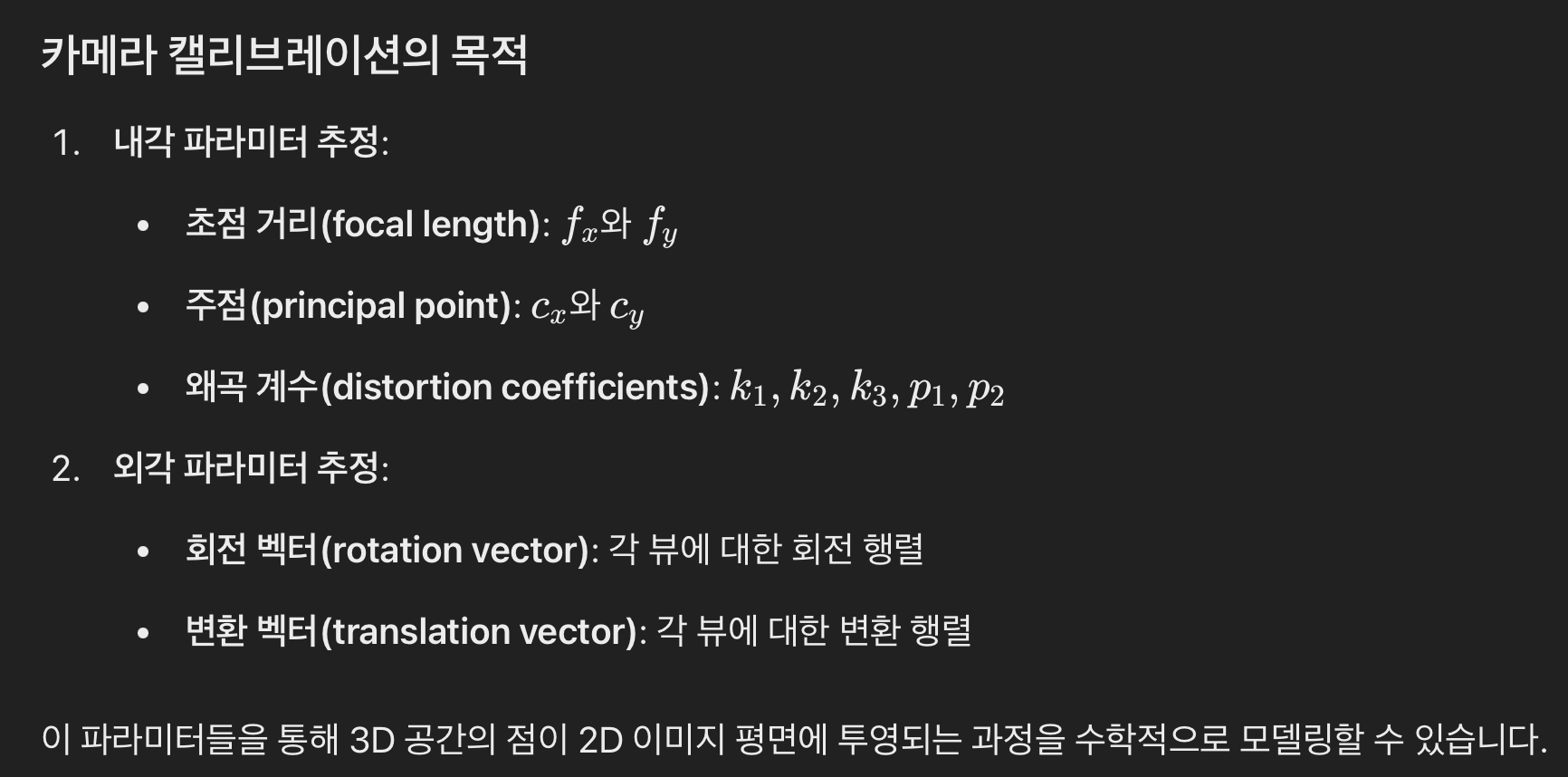
카메라 캘리브레이션은 여러 장의 이미지에서 캘리브레이션 패턴(예: 체커보드)의 3D 좌표와 이들의 이미지 상의 2D 좌표를 기반으로 합니다.3D 객체의 좌표를 2D 이미지 좌표에 매핑하여 객체의 위치와 자세(orientation)를 추정하는 것입니다. 이는 카메라 캘리
10.아이폰 카메라의 이미지 센서 픽셀 크기?
아이폰 12 카메라메인 센서 크기: 1/2.55인치 (약 5.6mm x 4.2mm)울트라 와이드 센서 크기: 1/3.6인치 (약 4.0mm x 3.0mm)아이폰에서 0.5x 줌을 선택하면 사용되는 센서 종류가 변경됩니다. 아이폰 12에서는 다음과 같은 두 가지 주요 카
11.Epipolar Geometry
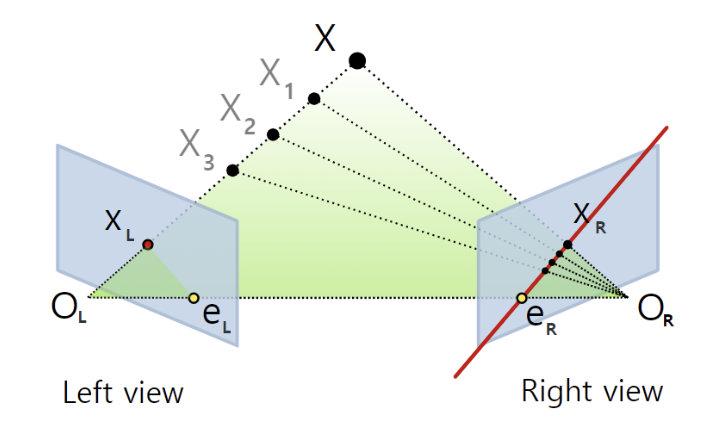
위 그림은 2개의 카메라 원점(OL, OR)에서 촬영된 이미지(파란색평면) 내 점(XL, XR)과 3차원 점(X)간의 관계를 표현하는 그림Epipolar Geometry의 목적예시1) 2개 이미지 내 동일 점의 위치, 카메라 intrinsic/extrinsic pram