뭘 하고싶어?
- depth map → camera xyz coord → world xyz coord로 바꾸기
- world xyz coord 를 voxel mapping을 통해 visualize 하고, class 마다 점의 색깔을 달리해서 표시해보기
왜 하는데?
- 카메라가 실제로 커버할 수 있는 범위가 어디까지인지 궁금한데, 시각적으로 보면 좀 더 잘 보일 것 같음.
- 시뮬레이터(정답)와 함꼐 그리면 좀 더 커버리지에 대한 감을 잡기 쉬울 듯!
방법론
depth map → camera xyz coord
- depth → camera xy coord
- (n, 2, 3) * (n, 3) = (n, 2)
- (n, 2) → (n, 4)
- x, y, z, 1
import numpy as np
# 예시로 n=4로 가정합니다.
n = 4
# 두 행렬을 정의합니다.
matrix1 = np.random.rand(n, 2, 3) # (n, 2, 3) 크기의 첫 번째 행렬
matrix2 = np.random.rand(n, 3) # (n, 3) 크기의 두 번째 행렬
# 두 번째 행렬의 shape을 (n, 3, 1)로 변형합니다.
matrix2 = np.expand_dims(matrix2, axis=-1) # 또는 matrix2[:, :, np.newaxis]
# 행렬곱을 수행합니다.
result = np.matmul(matrix1, matrix2) # 결과 행렬의 shape은 (n, 2, 1)
# 결과 행렬에서 마지막 차원을 제거합니다.
result = np.squeeze(result, axis=-1) # 또는 result[:, :, 0]
print(result) # 결과 행렬의 shape은 (n, 2)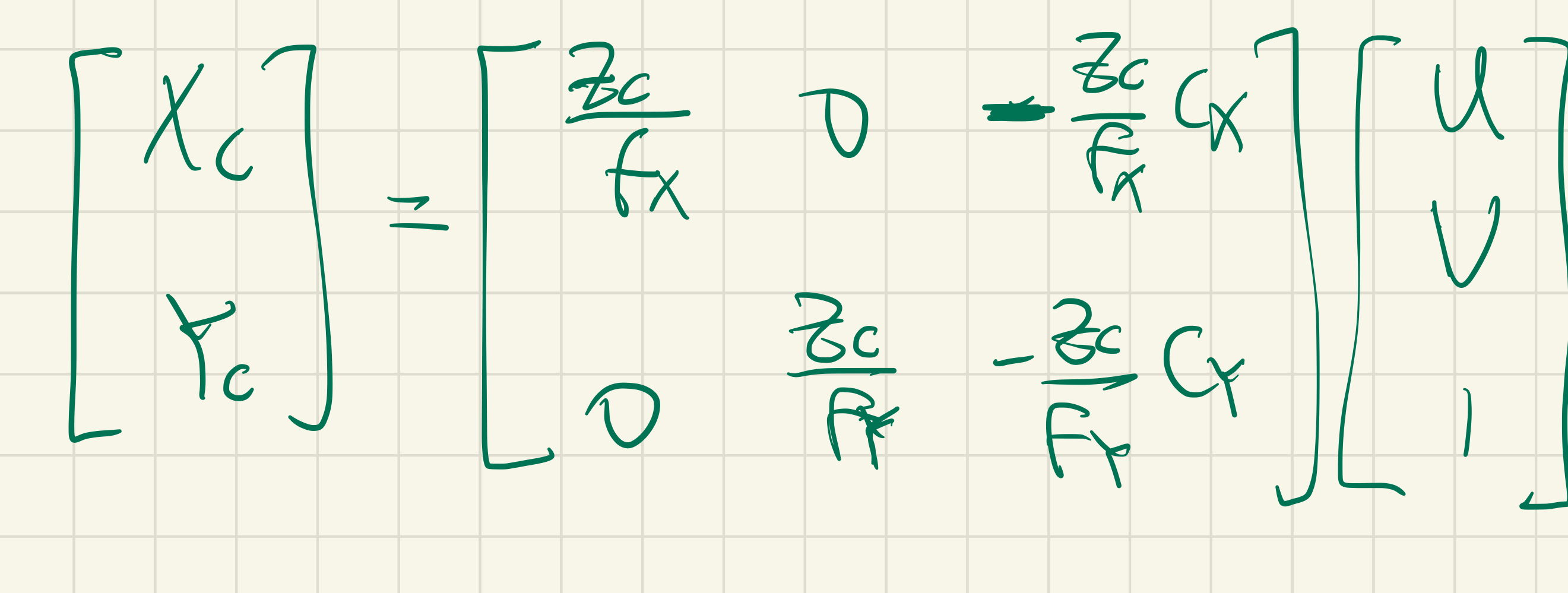
- camera xy → depth
- camera extrinsic matrix를 inverse 취하자.
- (n, 3, 4) * (n, 4) = (n, 3)
- camera extrinsic matrix를 inverse 취하자.

모든 의사 결정 과정을 지나칠 정도로 모두 기록하고, 나중에 스스로 피드백 하는 것