1. 개요
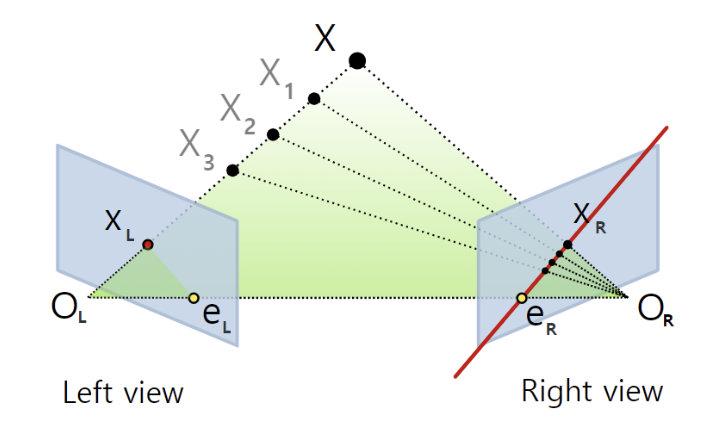
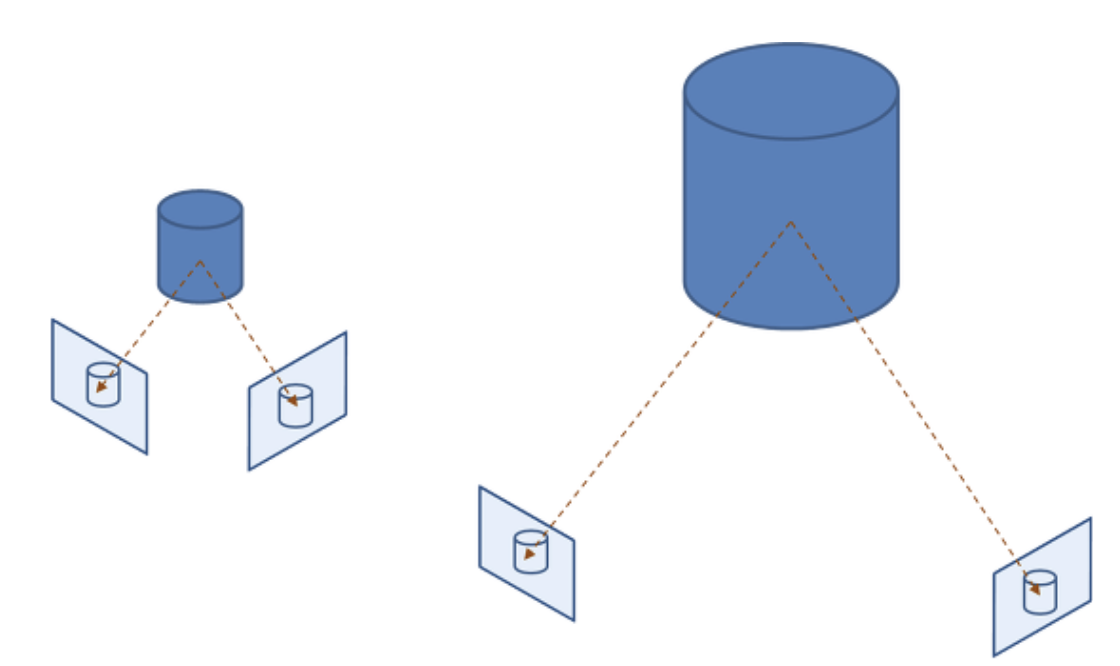
- 위 그림은 2개의 카메라 원점(OL, OR)에서 촬영된
이미지(파란색평면)내 점(XL, XR)과 3차원 점(X)간의 관계를 표현하는 그림 - Epipolar Geometry의 목적
- 예시1) 2개 이미지 내 동일 점의 위치, 카메라 intrinsic/extrinsic prameter를 알면
- 3D Point의 좌표를 계산 할 수 있습니다.
- 예시2)
- 2개 카메라 intrinsic/extrinsic parameter가 주어진다면,
- left view에서 점XL은 right view의 XR~eR를 잇는 선위에 위치하게 됩니다.
- left view에서 XL의 깊이를 알 수 없기 때문입니다.
- 이를 수행해주는 변환 행렬이
Essential matrix/Fundamental Matrix
- 2개 카메라 intrinsic/extrinsic parameter가 주어진다면,
- 예시3)
- 2개 이미지 내 동일점의 위치 8개만 주어지면,
- 2개 이미지간의 변환관계 matrix를 계산 할 수 있습니다.
- 2개 이미지 내 동일점의 위치 8개만 주어지면,
- 예시1) 2개 이미지 내 동일 점의 위치, 카메라 intrinsic/extrinsic prameter를 알면
2. Essential Matrix
- Essential Matrix (E)의 정의
- normalized image plane 에서의 매칭 쌍들 사이의 기하학적 관계를 설명
left view의 p와 행렬곱(matrix multiplication)으로right view의 p'좌표로 변환시키는 matrix- 여기서 p와 p'(소문자임)은 normalized image plane에서의 u, v 좌표계를 의미
- Essential Matrix의 목적
- 3차원 P위치를 모르거나 camera parameter가 주어지지 않는 상황에서
한쪽 normalized image plane내의 한 점에 대응하는,다른 view에서의 epipolar line을 찾을 수 있는 행렬- (normalized image plane 기준) 두 영상 좌표 p와 p'간 전환 관계를 나타내는 행렬
- 3차원 P위치를 모르거나 camera parameter가 주어지지 않는 상황에서

- 위 식의 오른쪽을
essential (or epipolar) constraint라고 부른다. - TODO:
(p')TEp = 0으로 표현하기도 하던데, 둘 다 만족하는건지 확인 필요
- 위 식의 오른쪽을
- 위 식을 만족하는 E(Essential Matrix)가
[Tx]R행렬이라는 것을 증명하기 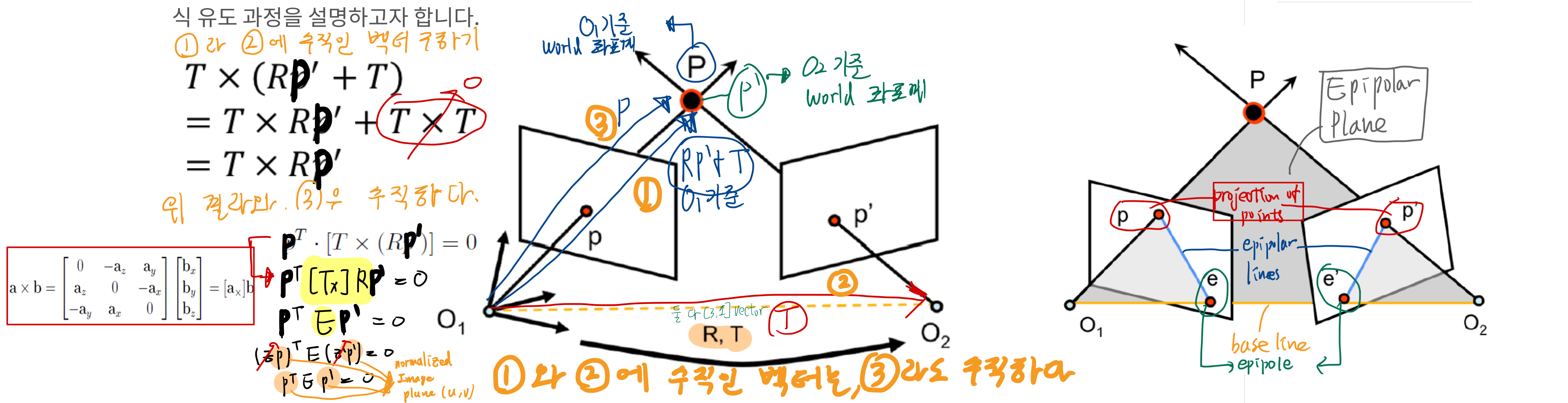
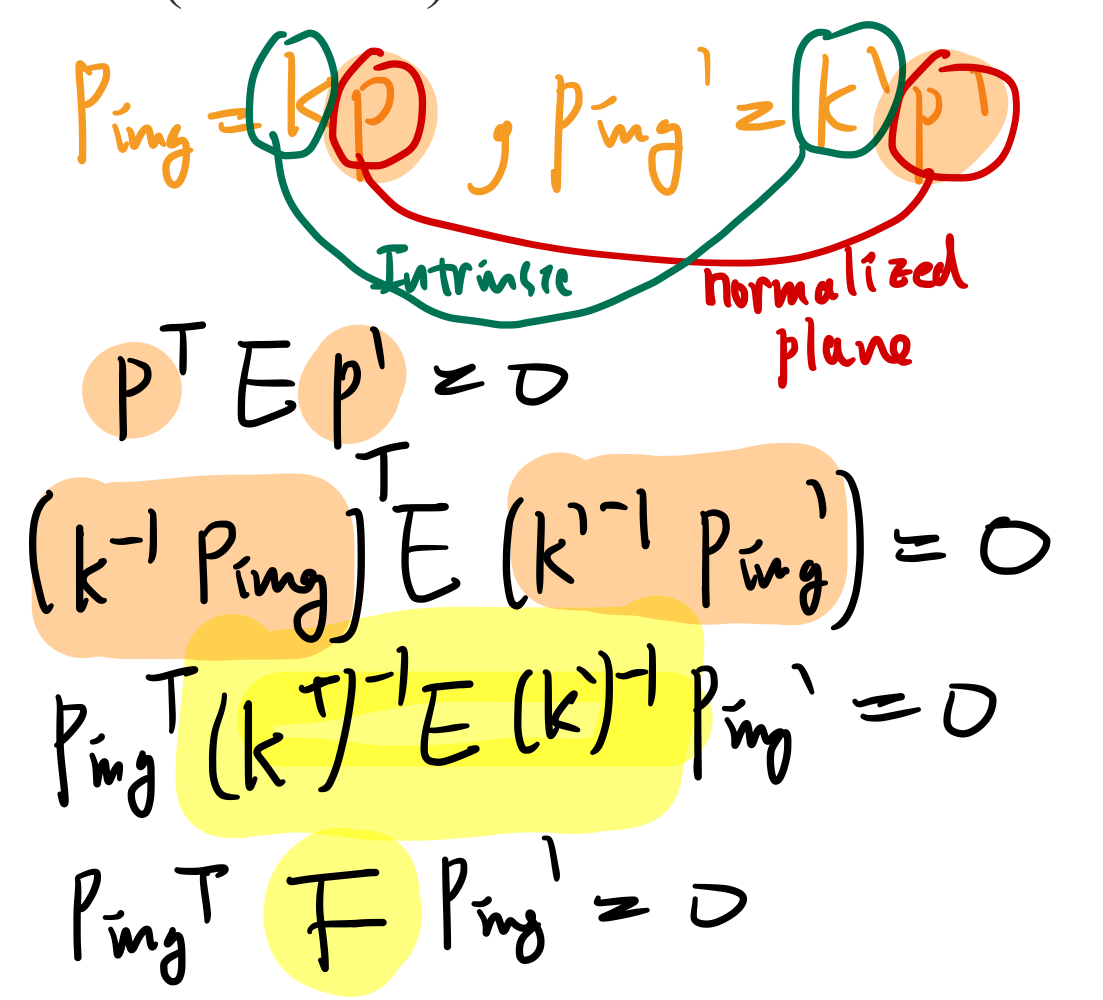
3. Fundamental Matrix
- Fundamental Matrix의 목적
- 카메라 intrinsic까지 포함한,
두 이미지 plane의 실제 pixel 좌표 사이의 기하학적 관계를 나타낸 행렬(항상 이런행렬이 존재한다.) - Essential Matrix와 동일하게 다른 view에의 epipolar line을 찾을 때 사용
- 카메라 intrinsic까지 포함한,
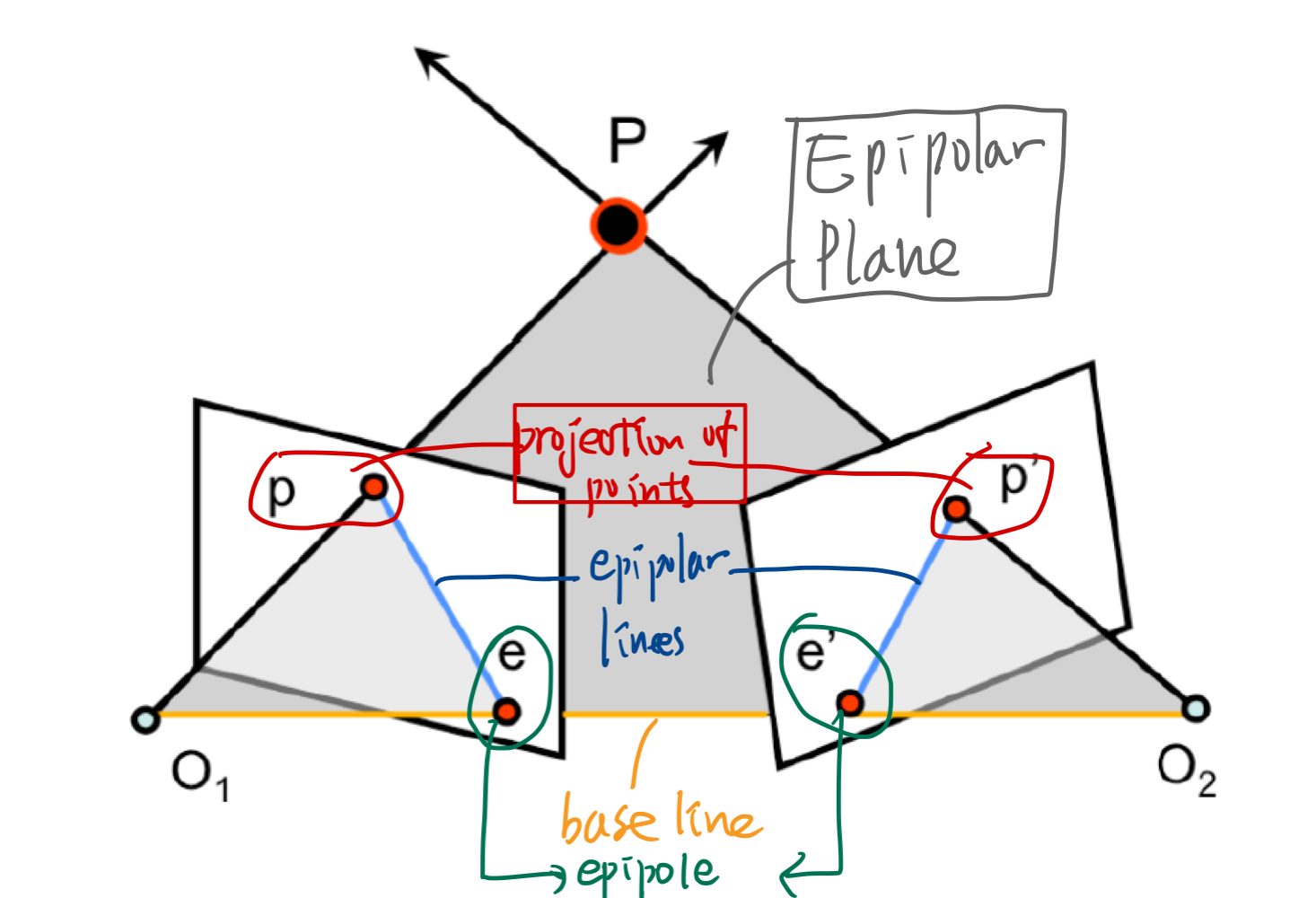
4. Epipolar Geometry
4.1. epipolar constraint
- 위 제약을 이용해서 뭘 구하고 싶은가?
Fundamental Matrix!- 만약 내가, 각 카메라의
intrinsic을 알고 있다면,Fundamental Matrix로부터Essential Matrix를 얻을 수 있고,Essential Matrix=[Tx]R이므로,- 카메라 1 좌표계 기준, 카메라 2의 Extrinsic matrix를 구할 수 있습니다.
- 만약 내가, 각 카메라의
4.1.1. intrinsic을 모르는 경우
- 이미지 쌍의 7개의 매칭점을 알고 있으면, 우리는
epipolar constraint을 이용해서,Fundamental Matrix를 구할 수 있습니다. - 단, 여기서 주의해야 할 점은 F의 스케일(scale)까지는 결정할 수 없다는 점입니다 (E도 마찬가지입니다).
- 가까이에 있는 작은 물체를 찍거나 멀리 있는 큰 물체를 찍어도 같은 영상을 얻을 수 있음을 상기하기 바랍니다.
4.1.2. intrinsic을 아는 경우
- 만일 카메라 파라미터를 알고 있다면 Essential matrix E만 구하면 됩니다.
- Essential matrix E를 결정하기 위해서는 보통 5쌍의 매칭점을 필요로 합니다만
- 알고리즘에 따라서는 8 쌍의 매칭점을 필요로 하는 경우도 있고, 어떤 경우에는 3쌍, 2쌍, 심지어는 1쌍의 매칭점만을 필요로 하는 경우도 있습니다.
- E는 R, t로 구성되는데
회전변환 R이 3 자유도, 스케일을 무시한 평행이동 t가 2 자유도, 도합 5 자유도이므로 5쌍의 매칭점을 필요로 함. - Essential 행렬을 구할 때 몇 쌍의 매칭점들을 필요로 하느냐에 따라서 알고리즘을 8-point 알고리즘, 5-point 알고리즘, ..., 1-point 알고리즘 등과 같이 부릅니다.
- 예를 들어, 3-point 알고리즘은 E를 구할 때 3쌍의 매칭점을 이용하는 알고리즘을 지칭합니다.
- 3-point 알고리즘, 2-point 알고리즘 등과 같이 원래 요구되는 매칭쌍(5쌍)보다 적은 수의 매칭쌍을 이용하여 E를 구할 수 있는 이유는
- E에 추가적인 constraint를 가하기 때문입니다.
- 예를 들어, 달리는 자동차에 장착된 카메라로 촬영한 영상들 사이에는,
- 우리가 손으로 카메라를 들고 맘대로 찍은 영상과는 분명히 다른 어떤 추가적인 constraint가 존재합니다
- (지면과의 높이가 고정된 점, 자동차의 pitch와 roll의 변화가 거의 없는 점 등).
- 여기에 추가적으로 자동차의 모션을 원운동 또는 직선운동으로 모델링하게 되면 훨씬 적은 수의 매칭쌍만으로 E를 결정할 수 있게 됩니다.
4.2. triangulation
- triangulation (삼각측량법)은
- 두 이미지 평면 사이의 기하학적 관계가 주어지고 (즉, E 또는 F가 주어지고),
- 두 이미지 평면상의 매칭쌍 p, p'이 주어지면
- 이로부터 원래의 3D 공간좌표 P를 결정할 수 있다는 것
- 바로 스테레오 비전에서 거리(depth)를 구할 때 하는 일입니다.

모든 의사 결정 과정을 지나칠 정도로 모두 기록하고, 나중에 스스로 피드백 하는 것
https://kumu.io/bothbest/why-do-people-consider-bamboo-flooring
https://www.aleviforum.com/bothbest
https://worldschoolface.com/index.php/profile-55061
https://amazemediacollege.com/forums/users/bothbest/
https://forum.kiasuparents.com/user/bothbest
https://zeroone.art/profile/bothbest
https://www.photocontest.gr/users/bamboo-flooring/
https://medibulletin.com/author/bothbest/
https://www.classiccitynews.com/profile/bothbest/profile
https://www.happycampersmontessori.com/profile/bothbest/profile
https://www.levelupbasketballtrainingllc.com/profile/bothbest/profile
https://www.housedumonde.com/profile/bothbest/profile
https://www.printables.com/@bothbest_3582539
https://www.do3d.com/profile/bothbest/profile
https://www.cambodgemag.com/en/profile/bothbest/profile
https://www.yapstate.gov.fm/profile/bothbest/profile
https://www.mimigstyle.com/profile/bothbest/profile
https://www.clevercomponents.com/portal/community/p9957/bamboo-flooring.aspx
https://www.salesfully.com/profile/bothbest/profile
https://www.blog.bhsusa.com/profile/chinahousehold65215/profile
https://www.informe21.com/profile/bothbest/profile
https://www.hentai-foundry.com/user/bothbest/blogs/20357/The-Unique-Journey-of-Bamboo-Flooring
https://infiniteabundance.mn.co/members/35641220
https://infiniteabundance.mn.co/posts/90004462
https://infiniteabundance.mn.co/posts/90004531
https://womenindata.mn.co/members/35641326
https://pathwaycitychurch.mn.co/members/35641360
https://pathwaycitychurch.mn.co/posts/90004764
https://pathwaycitychurch.mn.co/posts/90004776
https://aisalon.mn.co/members/35641436
https://www.palistrong.org/members/35641496
https://authortunities-hub.mn.co/members/35641539
https://authortunities-hub.mn.co/posts/eco-friendly-flooring-why-bamboo-is-a-sustainable-choice
https://authortunities-hub.mn.co/posts/bamboo-flooring-thailand-supplier