Kalman filter란?
-
a classic state estimation technique.
시간에 따라 변하는 system의 state를 estimation하는 방법 중 하나. -
Kalman filter에 대해 직관적인 설명으로 도움이 되었던 영상: https://www.youtube.com/watch?v=ul3u2yLPwU0
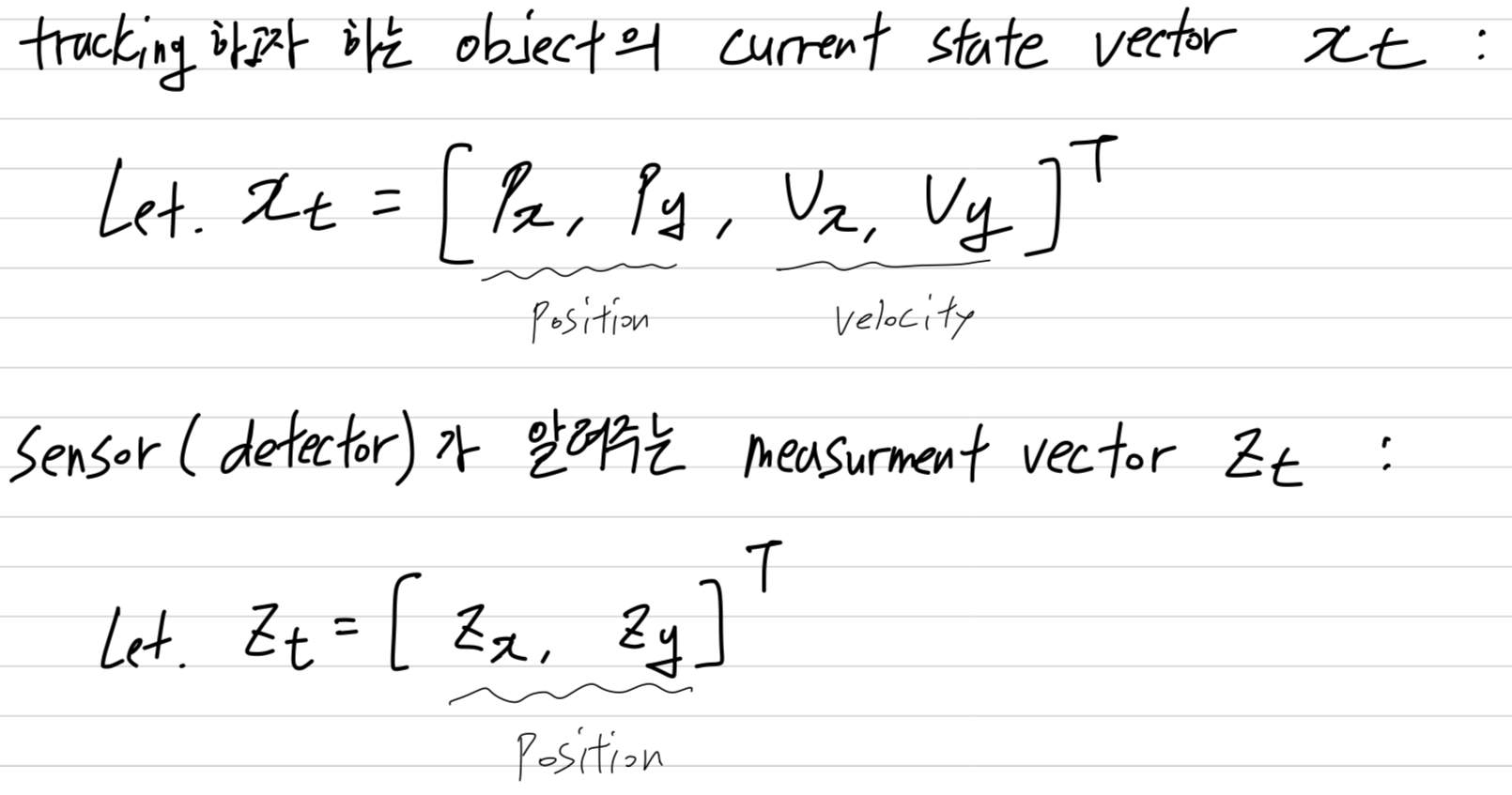
1. System Definition
- : tracking하고자 하는 object의 current state vector
- : sensor (object detector)가 알려주는 measurement vector
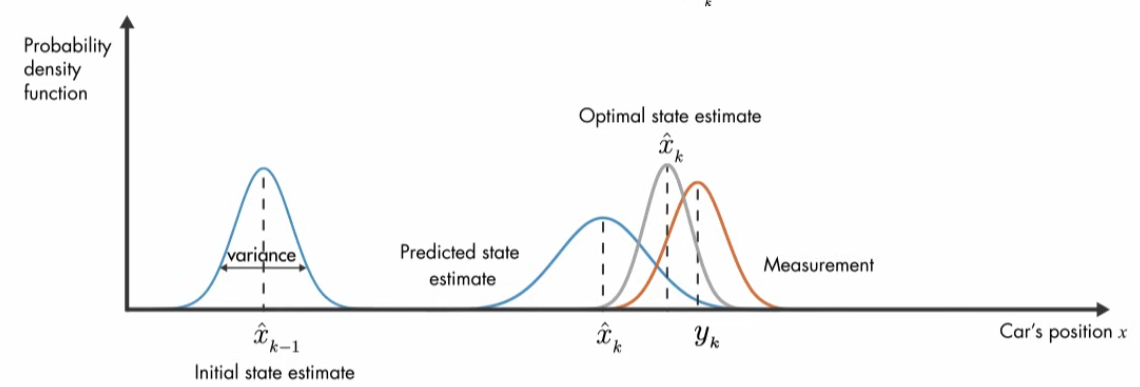
2. State & Error Covariance Prediction
과거의 정보와 물리 법칙을 이용해 현재 object가 어디 있을지 추측하는 과정.
=
- 고전 역학의 등속도 운동 법칙 (위치 = 이전 위치 + 이전 속도 시간)을 matrix로 표현하면 다음과 같음:
State Transition Matrix, :
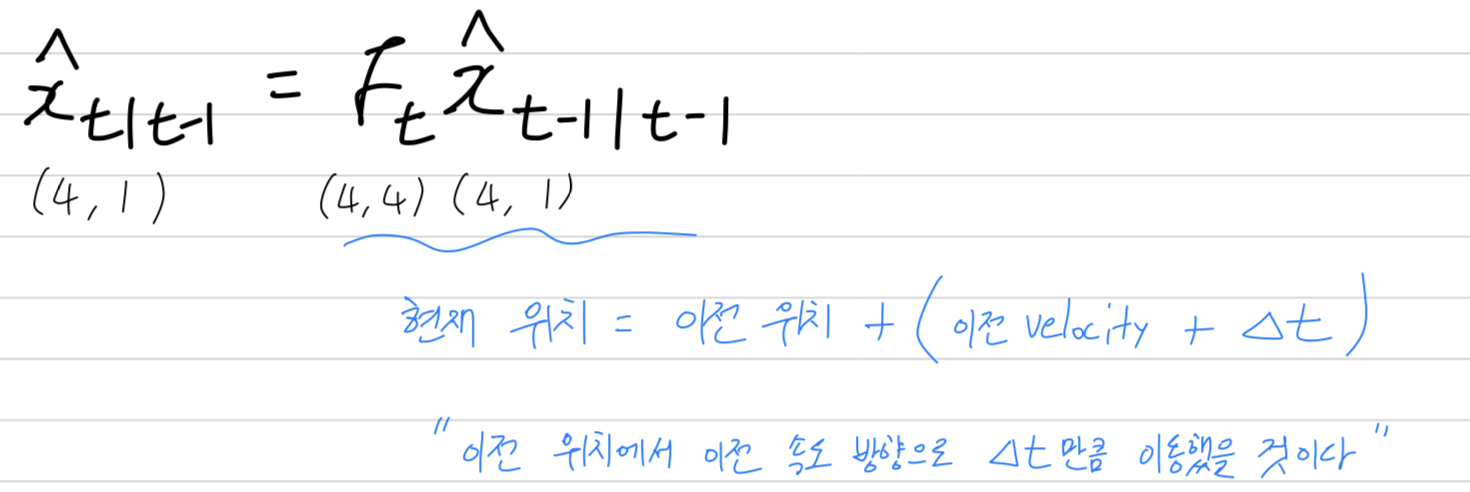
2.1. State Prediction,
- 이전 시간 의 추정치를 바탕으로 현재 시간 의 status 를 prediction. (외부 제어 입력은 없다고 가정)
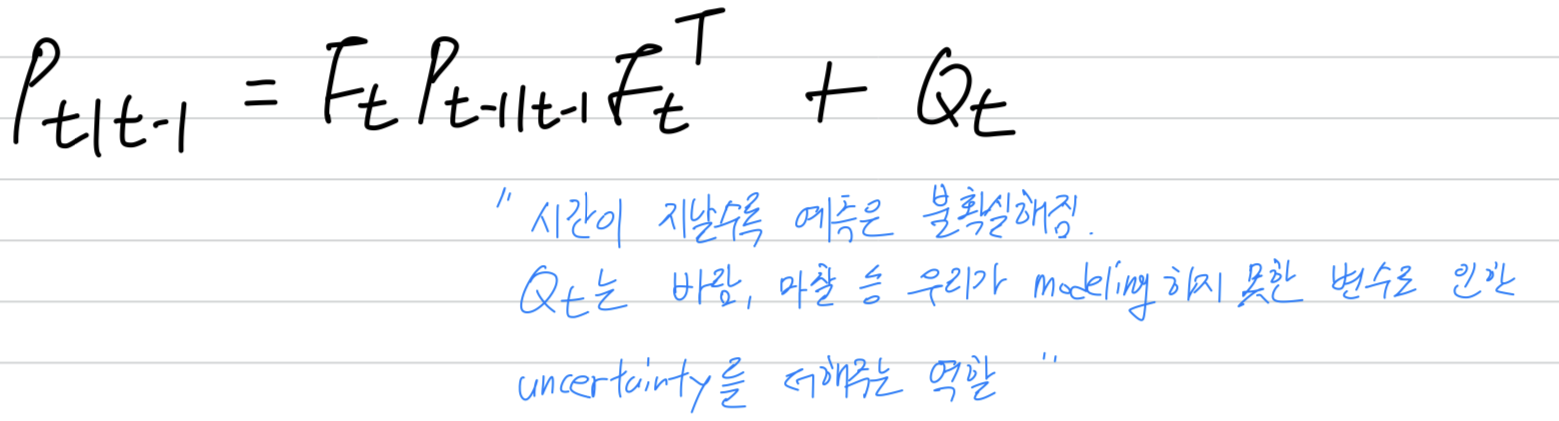
2.2. Error Covariance Prediction,
- 예측이 얼마나 불확실한지를 나타내는 Error Covariance Matrix()를 upate
3. Update
- prediction과 실제 measurement를 섞어서 가장 정확한 최적의 위치를 찾아내는 과정
3.1. Observation Matrix,
- 먼저, predicted state vector 와 sensor measurement vector 와 비교할 수 있도록 변환해줘야 함.
이를 위해, state vector에서 위치 정보만 추출할 수 있도록 하는 Observation Matrix, 를 다음과 같이 정의함:
3.2. Measurement Residual,
- sensor measurement 와 우리의 predicted location 의 차이를 계산
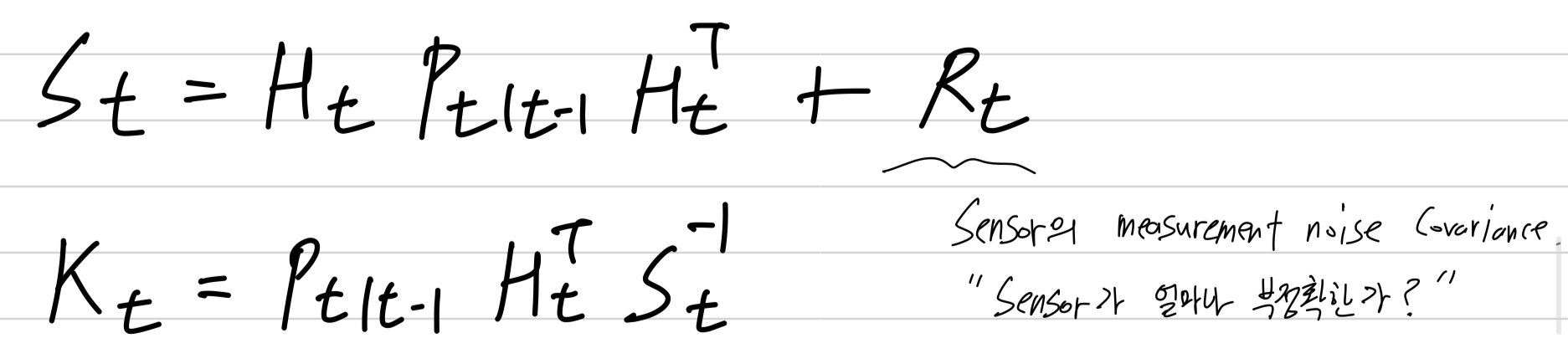
3.3. Kalman Gain,
- sensor를 얼마나 믿을지, 우리의 prediction을 얼마나 믿을지 비율을 결정하기 위해 Kalman Gain을 정의
3.4. State Update에서 Kalman Gain 이 어떤 역할을 하는지 더 자세히 나오겠지만 Kalman Gain이 Kalman Filter의 핵심이라 간략히 설명하자면,
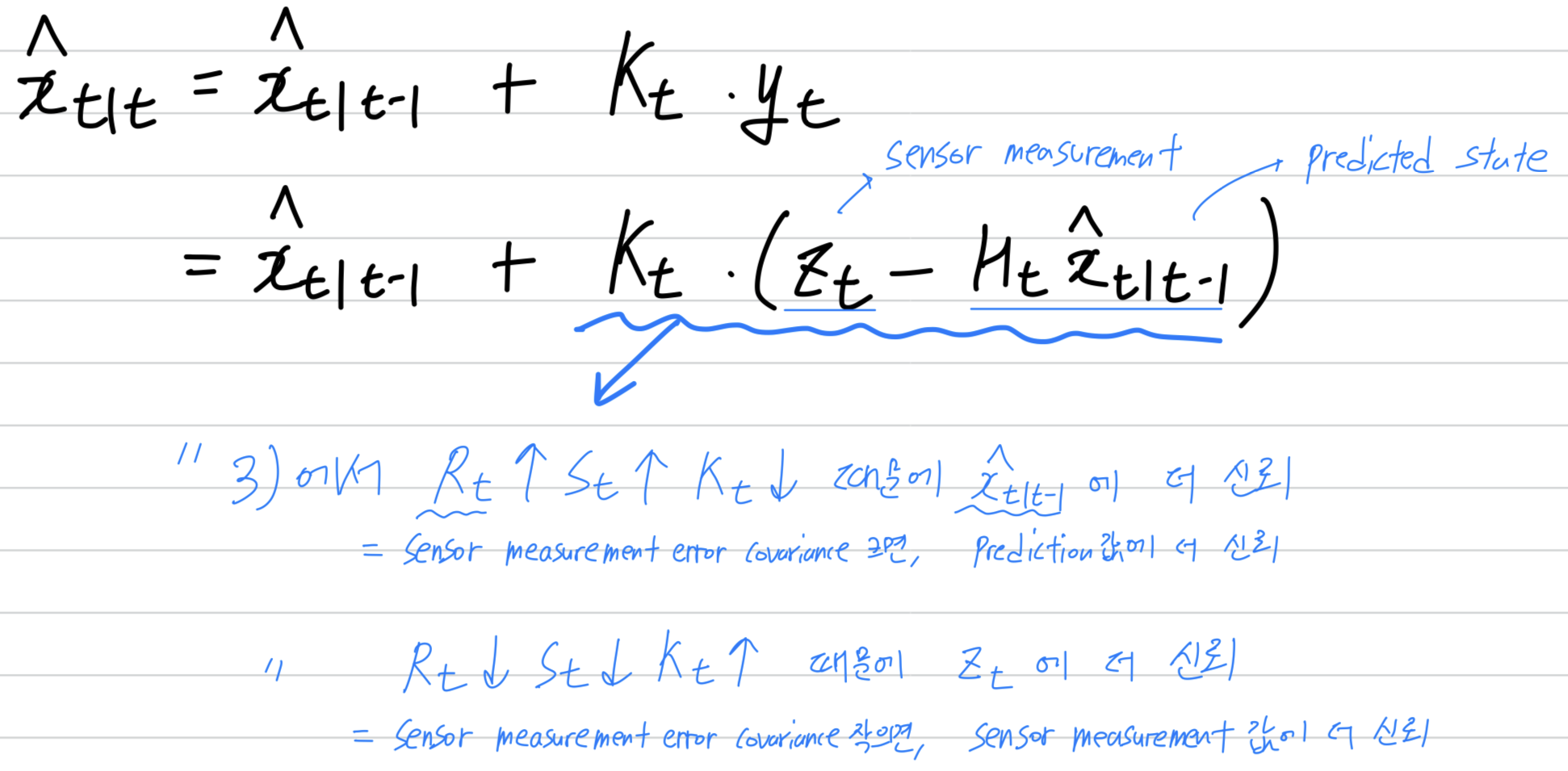
sensor noise()가 매우 크다면 는 0에 가까워져 prediction 값을 더 신뢰하게 되고,
그 반대의 경우에는 가 커져 sensor measurment값을 더 신뢰하게 됨.
3.4. State Update,
- predicted state에 measurement residual와 Kalman Gain을 곱해 최종 state를 correction(보정)함
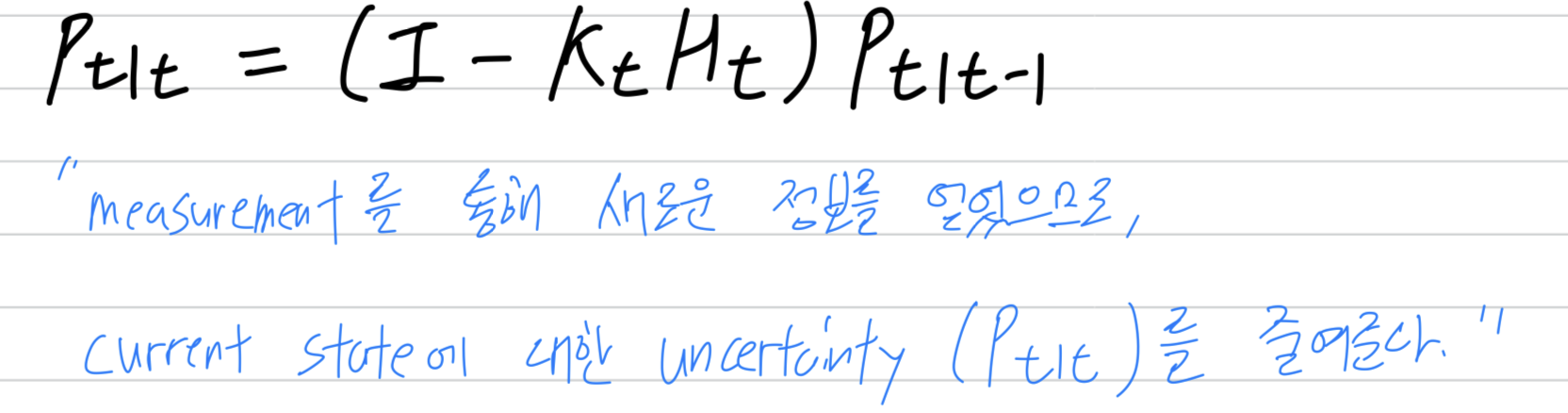
3.5. Error Covariance Update,
- measurement를 통해 새로운 정보를 얻었으므로, current state에 대한 uncertainty()을 줄여줌
- (질문) process noise covariance 와 measurment noise convariance 를 어떻게 결정하는가?
- (Gemini) 이 과정은 Kalman Filter의 성능을 좌우하는 핵심 단계이며, 이를 'Filter Tuning'이라고 부른다
- 획득 방법:
는 sensor (나의 경우 DL-based object detector, ex: YOLO)가 object의 위치를 측정할 때 발생하는 error의 variance를 나타냄.- Empirical Measurement:
가장 정성적인 방법은 정지된 object를 여러 frame에 걸쳐 detection하는 것.
detection한 bbox의 중심 좌표 data를 수집한 후, 각 축에 대한 variance를 계산하여 의 diagnoal로 사용.
이때, 을 고정시켜서 사용하는 듯함.
- Bounding Box Size Heuristics:
SOFT와 같은 Multiple-Object Tracking 에서는 camera 원근법으로 인해 object가 멀리 있을 수록 bbox가 작아지고 Noise의 absolute pixel 크기도 작아진다는 점을 반영.
따라서 를 고정하지 않고, 현재 detection된 bbox의 width와 height에 비례하도록 동적으로 설정하기도 함.
- Empirical Measurement:
- 획득 방법:
- 획득 방법:

Efficient Deep Learning