- OS : Ubuntu 22.04
- ROS 2 Humble
- Gazebo 11
1. 서비스 서버 만들기
1. 코드 생성
from my_first_package_msgs.srv import MultiSpawn
import rclpy as rp
from rclpy.node import Node
class MultiSpawning(Node):
def __init__(self):
super().__init__('multi_spawn')
self.server = self.create_service(MultiSpawn, "multi_spawn", self.callback_service)
def callback_service(self, request, response):
print('Request : ', request)
response.x = [1., 2., 3.]
response.y = [1., 20., 30.]
response.theta = [100., 200., 300.]
return response
def main(args=None):
rp.init(args=args)
MultiSpawn = MultiSpawning()
rp.spin(MultiSpawn)
rp.shutdown()
if __name__ =='__main__':
main()- my_first_package에 my_service_server.py 만들기
- create_service로 MultiSpawn 데이터 타입의 multi_spawn 생성
- 누군가가 서비스를 request한다면 콜백함수
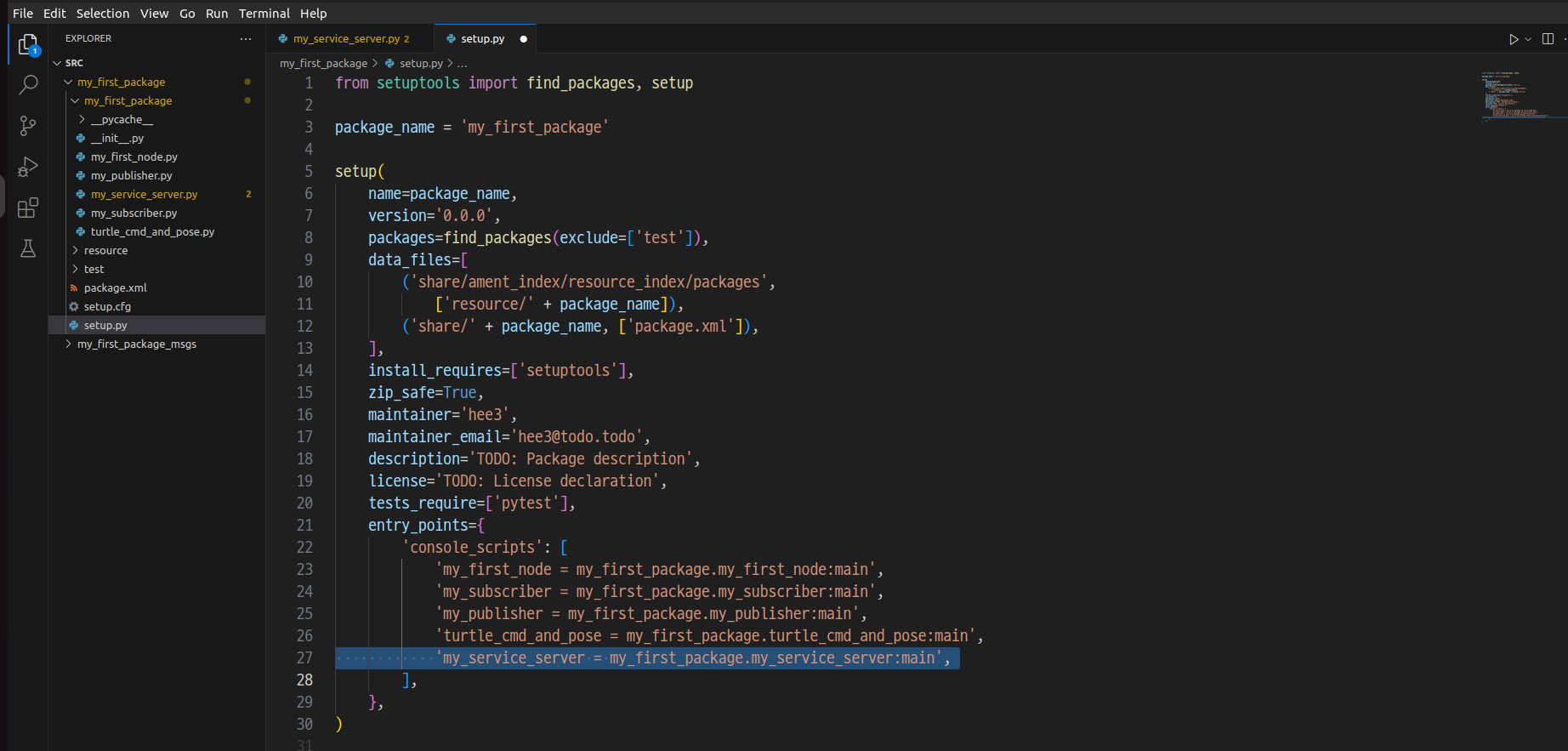
2. setup.py 추가
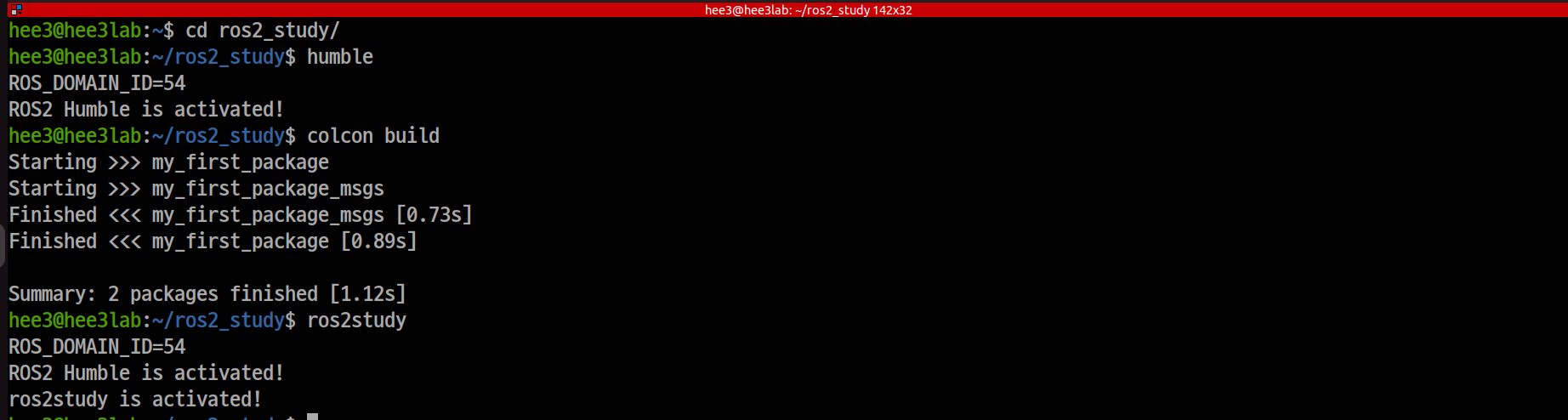
3. 빌드 후 환경 부르기
4. service list 확인
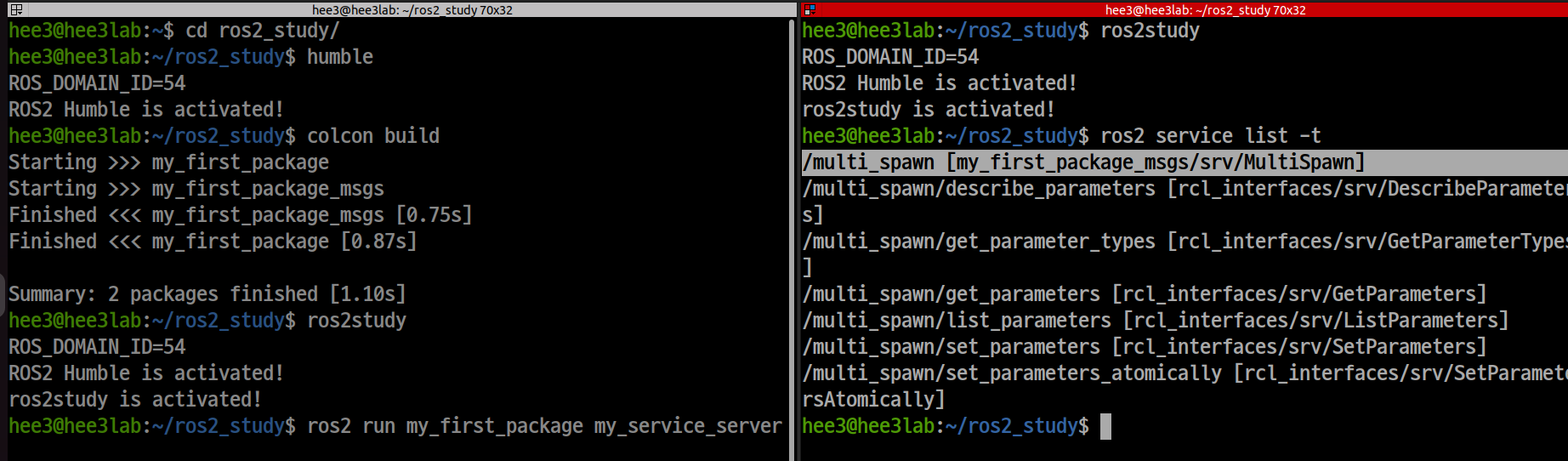
- 데이터타입 MultiSpawn 확인
5. service call 테스트
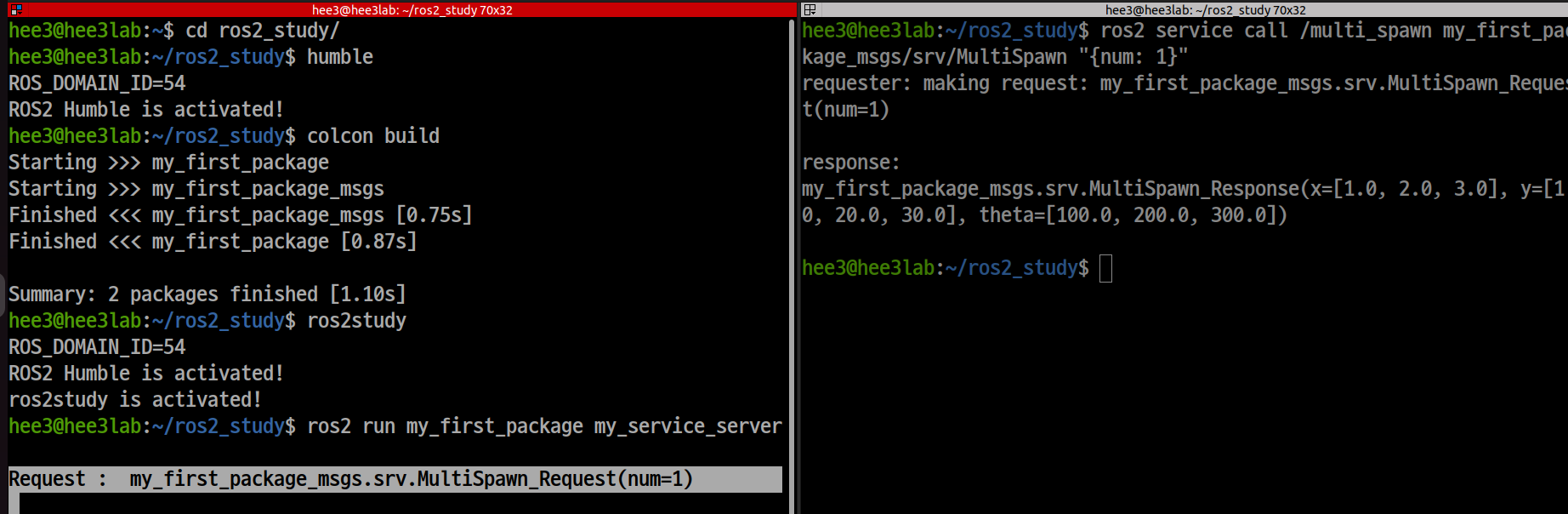
- response는 코드 작성한 그대로 확인
- request 받은 메세지도 확인
2. teleport_absolute 클라이언트 만들기
서비스 서버 안에 서비스 클라이언트 생성 가능
1. 코드 수정
from my_first_package_msgs.srv import MultiSpawn
from turtlesim.srv import TeleportAbsolute
import rclpy as rp
from rclpy.node import Node
class MultiSpawning(Node):
def __init__(self):
super().__init__('multi_spawn')
self.server = self.create_service(MultiSpawn, "multi_spawn", self.callback_service)
self.teleport = self.create_client(TeleportAbsolute, '/turtle1/teleport_absolute')
self.req_teleport = TeleportAbsolute.Request()
def callback_service(self, request, response):
self.req_teleport.x = 1.
self.req_teleport.y = 1.
self.teleport.call_async(self.req_teleport)
return response
def main(args=None):
rp.init(args=args)
MultiSpawn = MultiSpawning()j
rp.spin(MultiSpawn)
rp.shutdown()
if __name__ =='__main__':
main()2. 빌드 후 환경 부르기
3. 실행
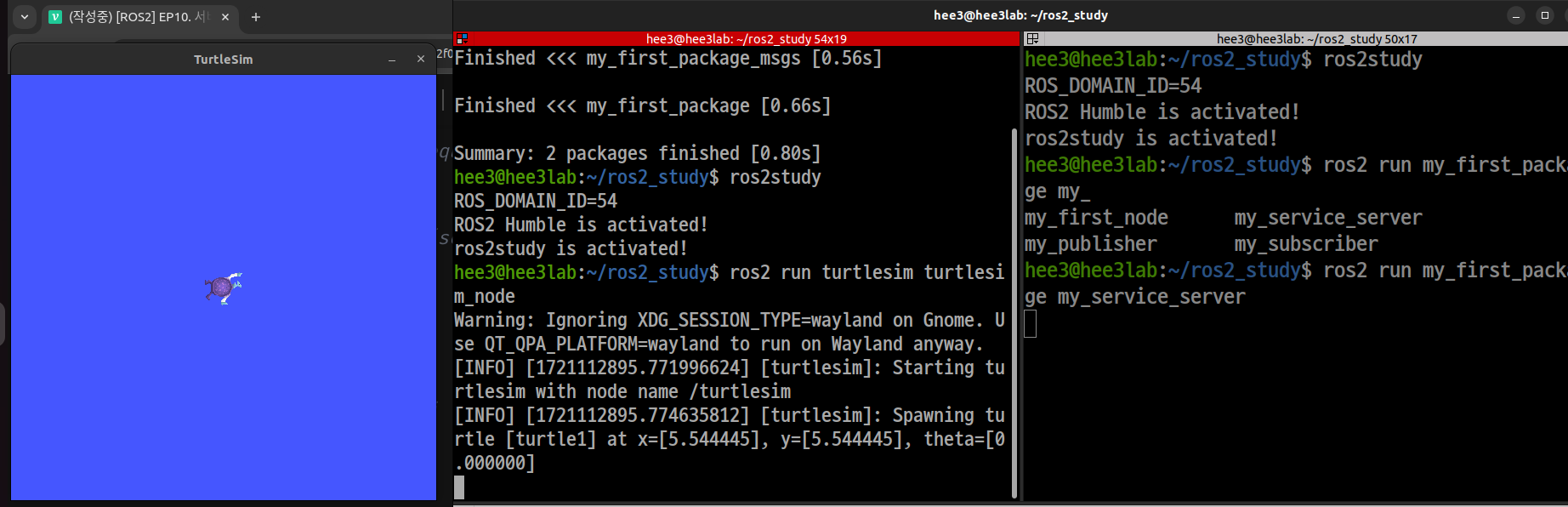
- turtlesim과 my_service_server 실행
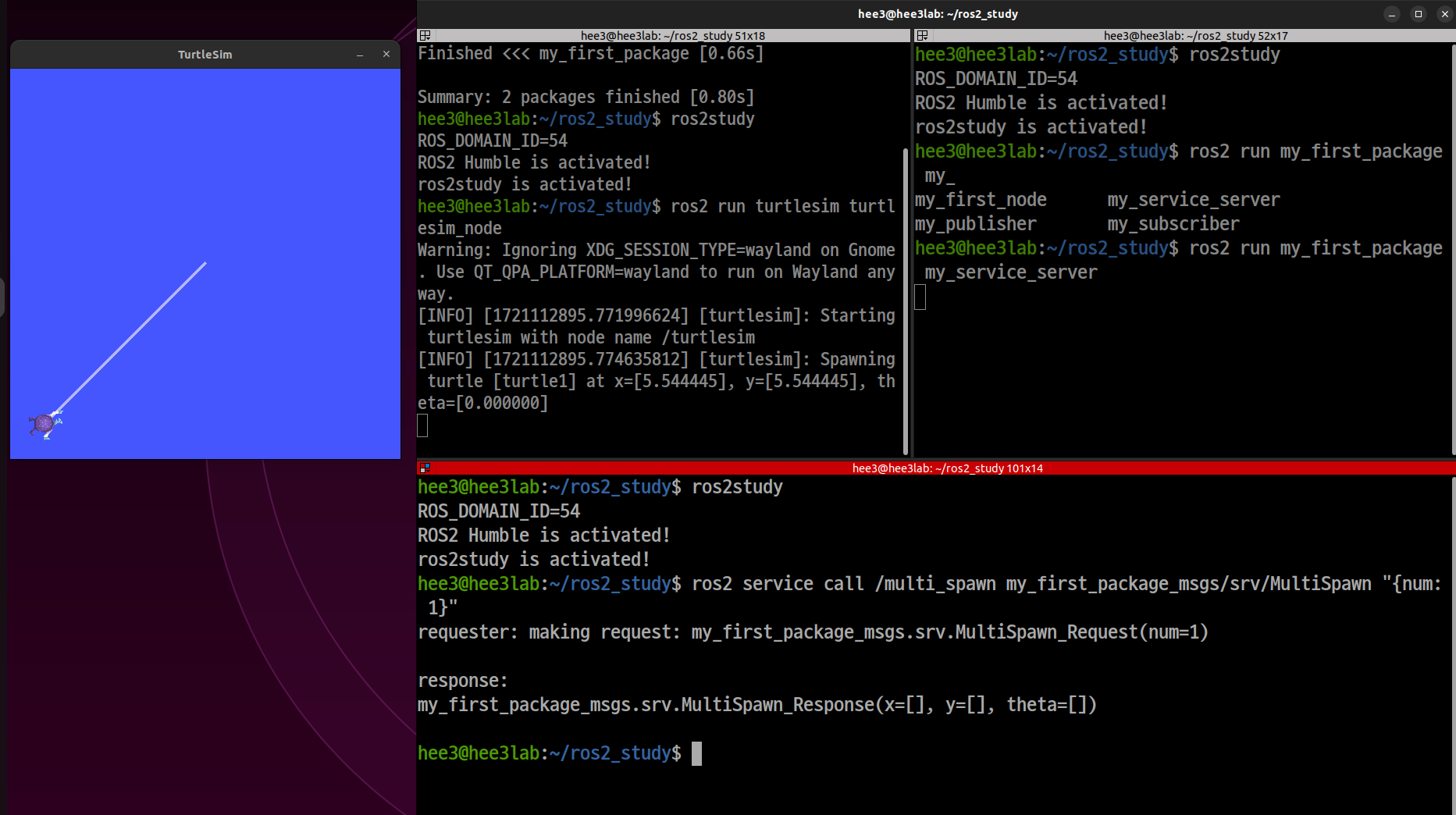
4, service call 확인

3D 모델러의 개발 도전기