- OS : Ubuntu 22.04
- ROS 2 Humble
- Gazebo 11
1. 토픽 메세지 정의
1. 새로운 패키지 생성
ros2 pkg create --build-type ament-cmake my_first_package_msgs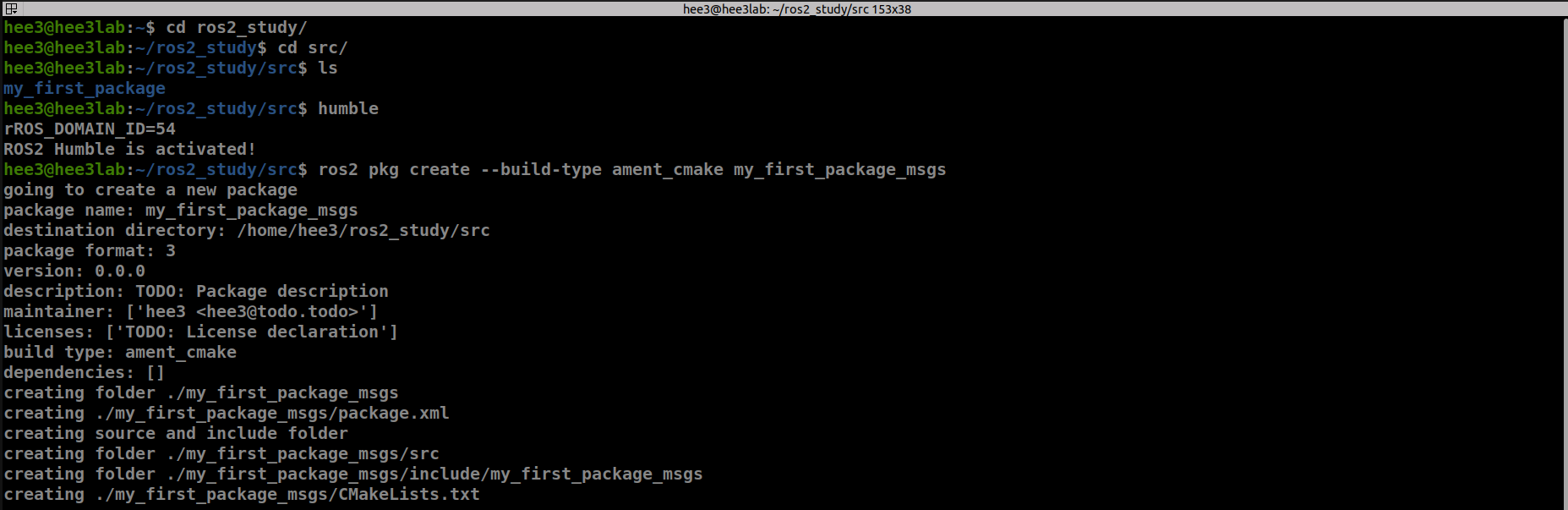
- src 폴더에서, ros2 pkg create 명령어로, 빌드 타입을 ament-cmake, 이름을 my_first_mackage_msgs로 생성
- ament-cmake의 메세지 빌드 기능 활용
- 직접 사용할 pkg와 사용할 메세지 정의를 pkg_msgs로 구분
- 원격pc에서 pkg_msgs만 가져와서 빌드 → 토픽 주고받기 (로봇의 ros2 버전이 다르더라도 핸들링 가능)
2. tree 확인
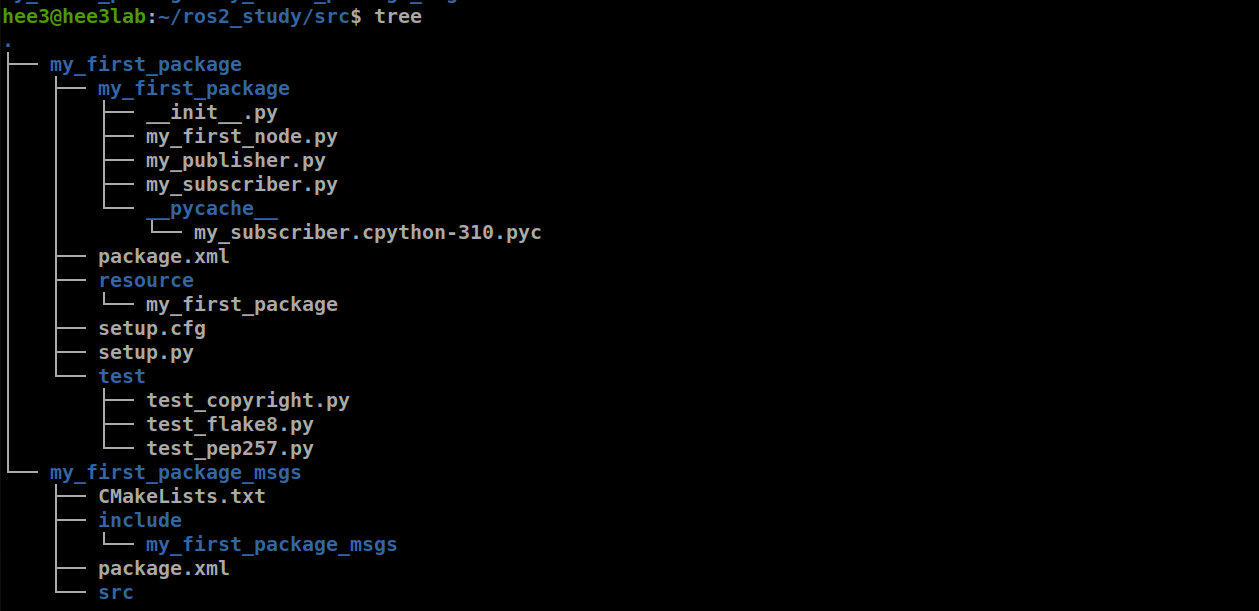
- ament-python은 setup.py, ament-cmake는 CMakeLists.txt에서 설정
3. CmdAndPoseVel.msg
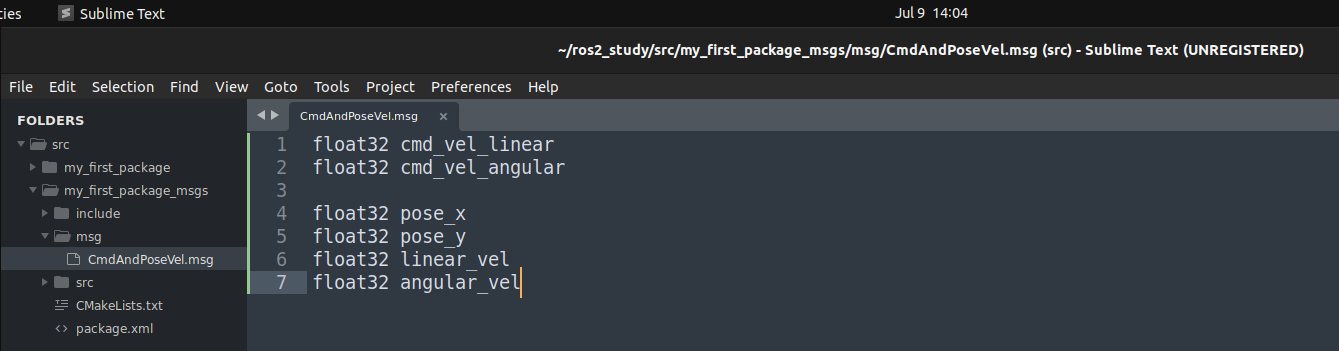
- 토픽에서 사용할 메세지 정의 (msg폴더)
- cmd_vel은 로봇의 직선/회전 명령 토픽
- pose 토픽 (x 위치, y 위치, 선속도, 각속도)
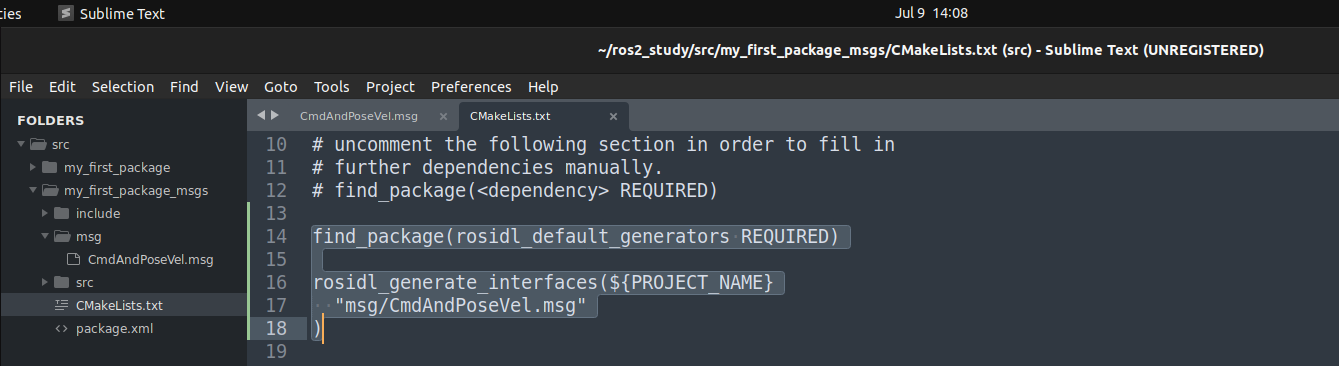
4. CMakeLists.txt 수정
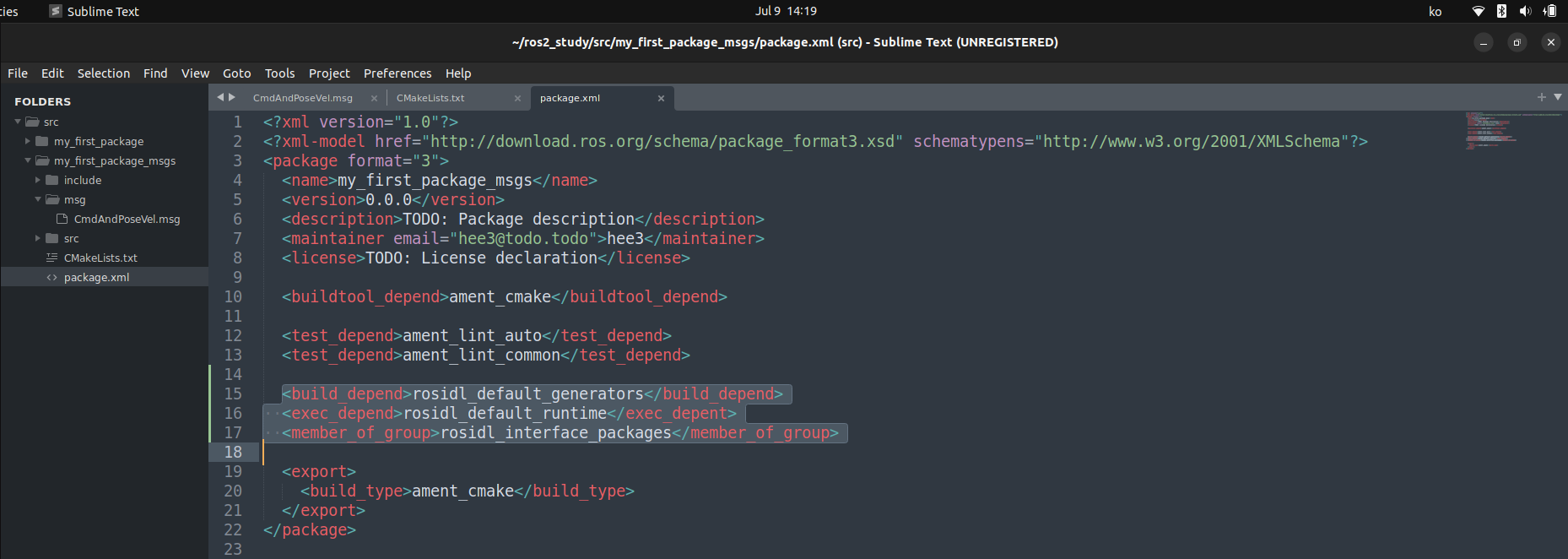
5. package.xml 수정
6. 빌드, 환경 읽기
⭐ 빌드는 workspace에서, package 생성은 src 폴더에서 ⭐
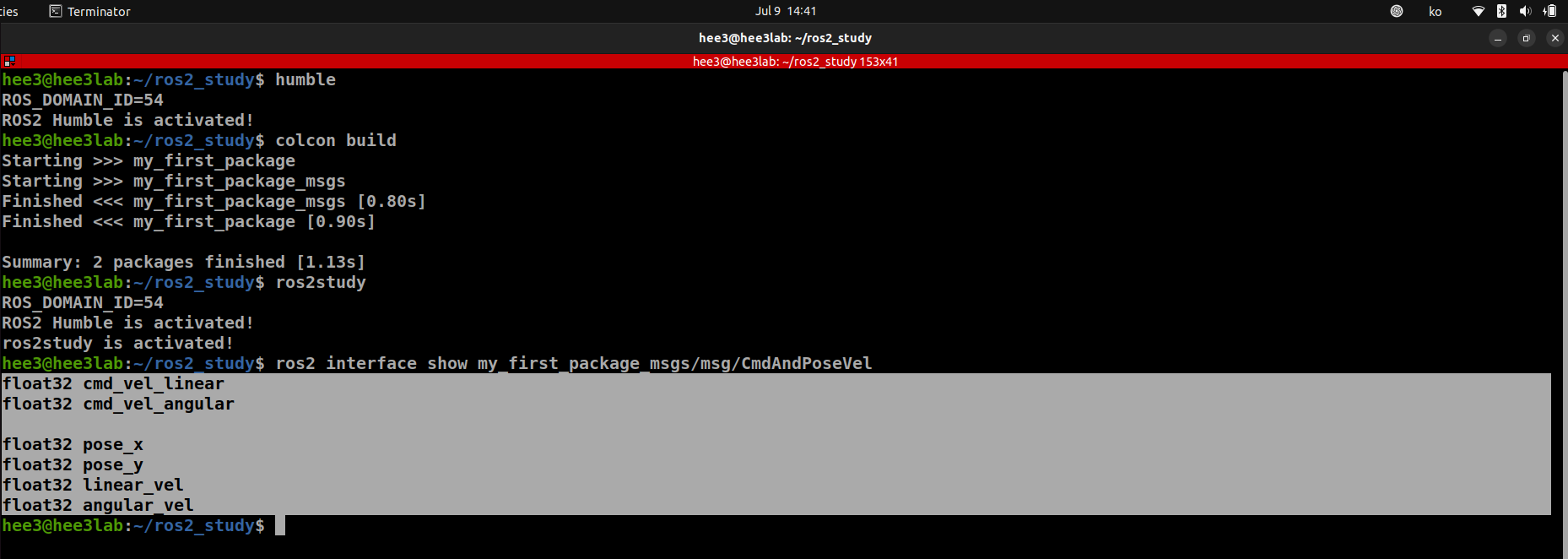
- interface show로 확인

3D 모델러의 개발 도전기