
1. E/E 아키텍처란?
가. 정의 및 기본 개념
1) E/E
E/E란 Electrical/Electronic의 약자로, 차량 내 전자제어장치(ECU), 센서, 액추에이터 등을 연결하는 전기전자 시스템 아키텍처를 의미합니다.
2) E/E 아키텍처의 구성 요소
기능 단위 ECU, 센서, 액추에이터, 네트워크 및 중앙 게이트웨이 등을 포함하며, 세대별로 구조가 발전 중입니다.
2. E/E Architecture의 세대별 발전
가. Distributed Architecture(1~3세대)
1) 1세대: 완전 분산형
- 각 기능별 ECU의 존재
- 간단하지만 시스템 복잡도 증가


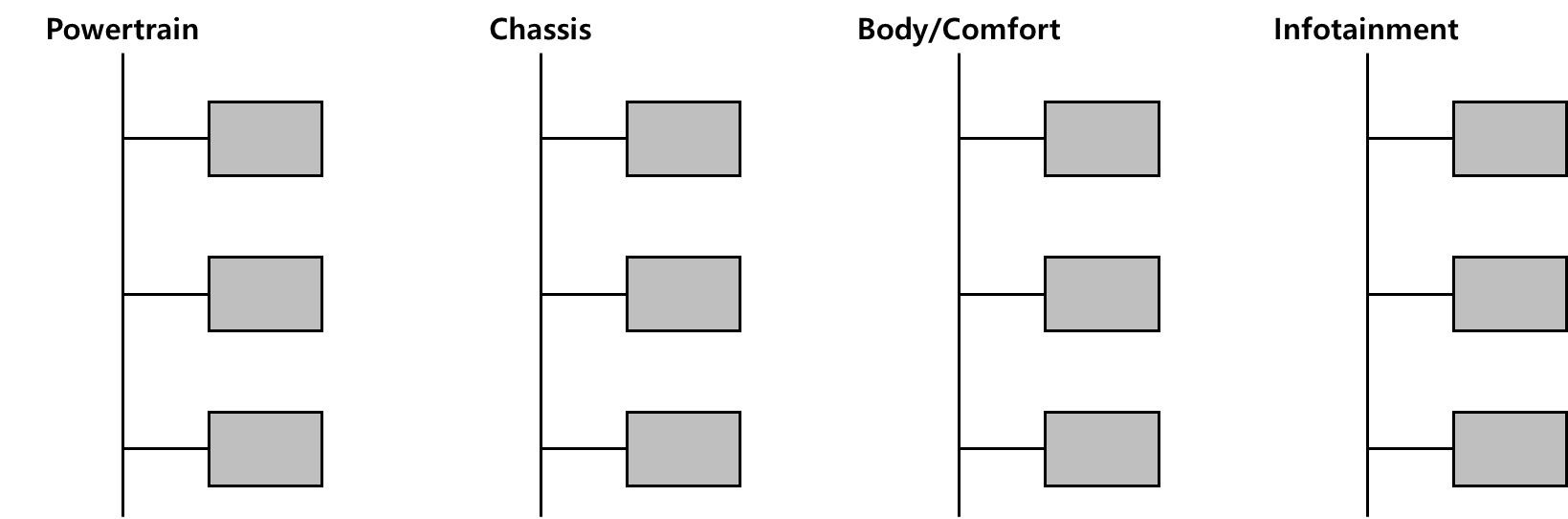
2) 2세대: 도메인 중심 분산형
- ECUs이 도메인(파워트레인, 섀시 등) 단위로 그룹화
- 도메인 내부 협업 가능
- 도메인 간 협업은 제한적
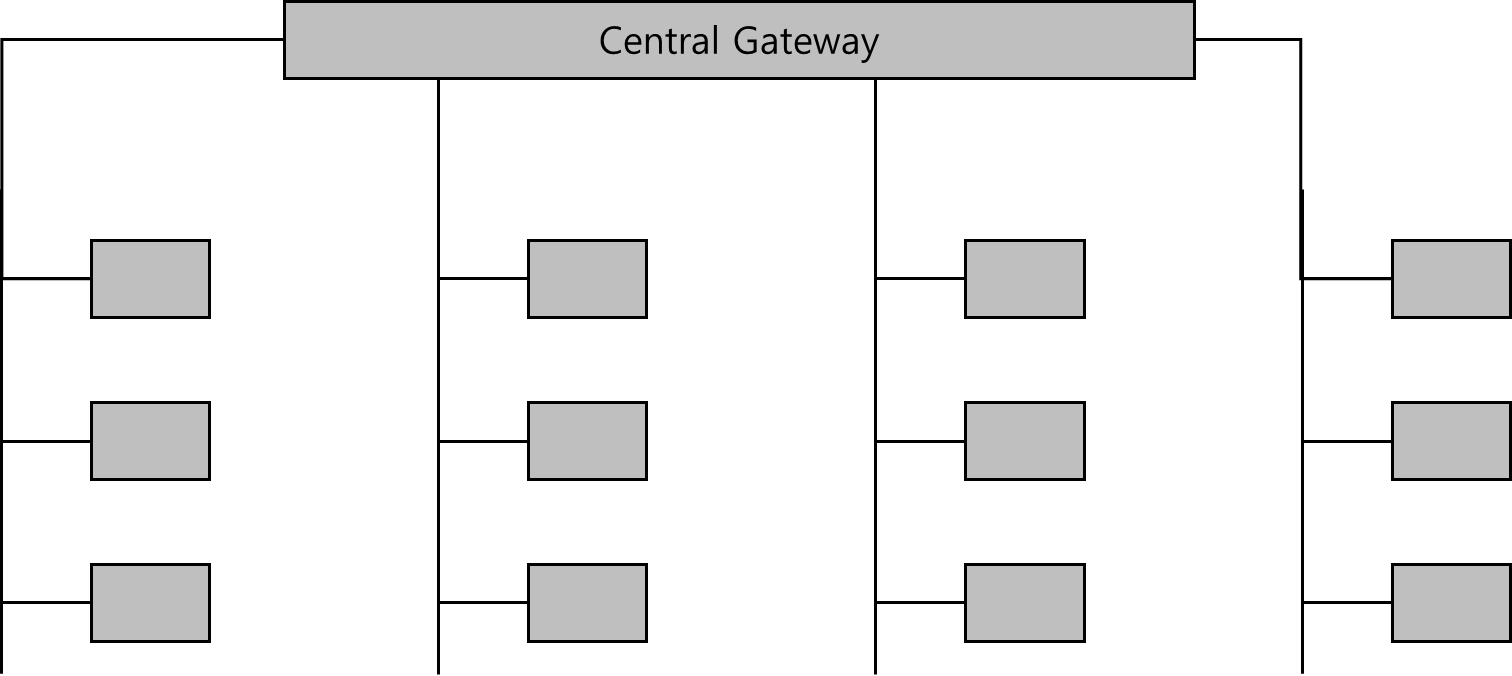
3) 3세대: 중앙 게이트웨이 추가
- 각 도메인 간 정보 교환 강화
- Adaptive Cruise Control 같은 복잡한 기능 구현 가능
- 응용별 네트워크와 ECU 존재, 일대일 통신 구조 유지
나. Domain Centralized E/E Architecture(4세대)
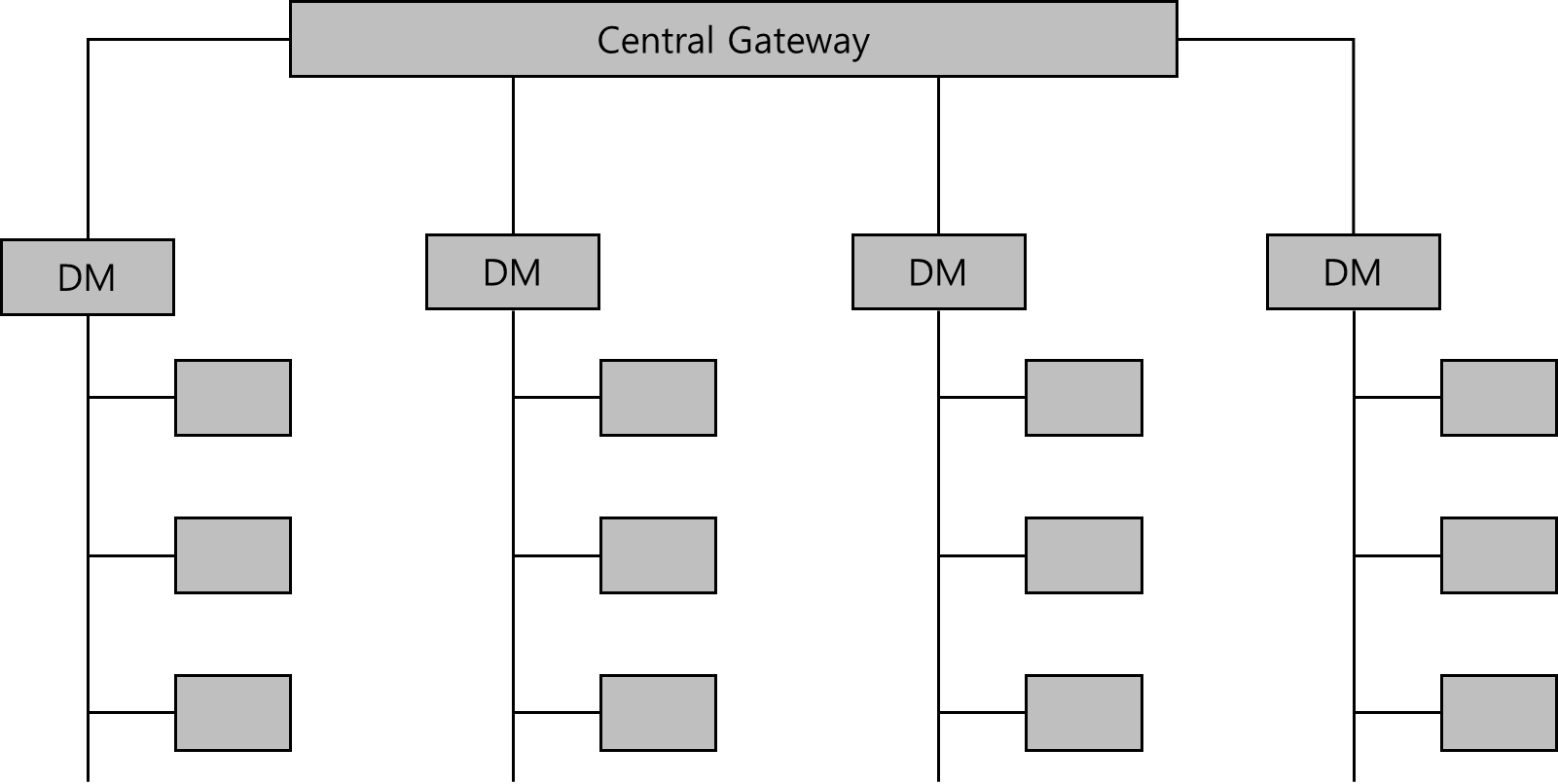
1) 기능 통합화 및 확장성
- Domain Master가 여러 ECU 기능 통합
- 비용 절감, 중앙 게이트웨이 병목 해소
- 도메인 간 SW 통합 플랫폼 활용
2) Communication Backbone으로 Ethernet 사용
- QoS, Fail-Safe 기능 요구됨
- Adaptive AUTOSAR와 Classic AUTOSAR 병용(倂用)
다. Zonal E/E Architecture (5세대)
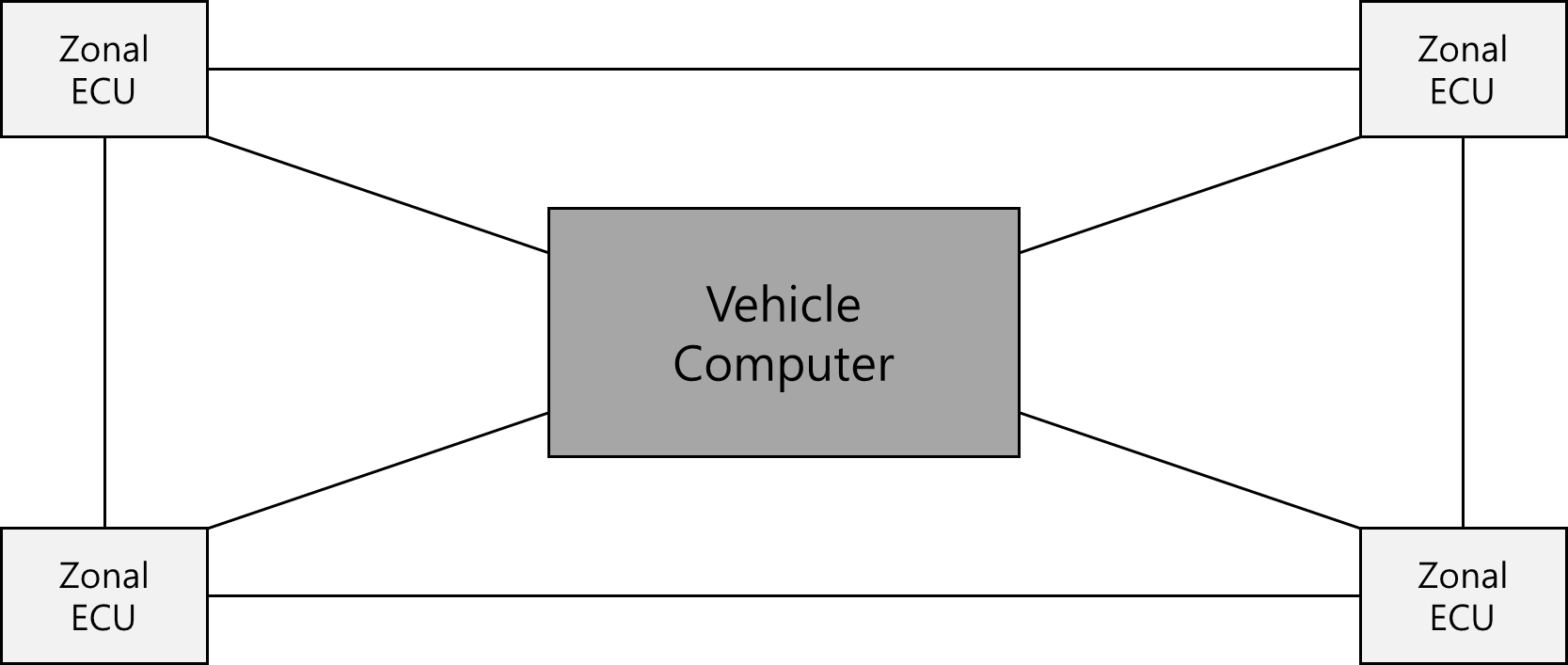
1) 정의 및 구성
가) Zonal 아키텍처란?
- 도메인 중심이 아닌 차량 위치 기준으로 ECU를 분산
- Virtual Domain 기반
- Zonal ECU + Vehicle Computer 구성
나) 기능 배치 및 연결 방식
- 센서/액추에이터는 가까운 zonal ECU에 연결
- Zonal ECU ↔ Vehicle Computer ↔ 타 ECU 간 협업 가능
다) 연산 및 통신 구조
- 고성능 연산을 위한 Vehicle Computer 존재
- 10 Gbps 이상의 이더넷과 TSN 기반 통신
- 일부 데이터는 All-to-Some 구조로 전달
2) 구성 요소별 역할
가) Zonal ECU
- 신호/서비스 기반 동작 (Signal/Service Oriented)
- CAN-FD, FlexRay, LIN 등 지원
- POSIX OS + AUTOSAR Adaptive 기반
- 전력 및 데이터 분배, 게이트웨이/스위치 역할 수행
나) Mechatronic ECU
- 정해진 기능 수행, MCU 기반 설계
- Static Application + AUTOSAR Classic
- ASIL D 수준까지 지원
다) Vehicle Computer
- Cross-domain 통합, 서비스 오리엔티드 아키텍처
- POSIX OS 위에 컨테이너 및 안드로이드 오토모티브 실행
- OTA, V2X, 다양한 인터페이스(CAN, Ethernet 등) 지원
- ISO26262 인증 요구, 목표 ASIL 수준은 B
3) Merits
가) 시스템 최적화
① 배선 길이 및 무게 감소
- 최대 50% 절감, 센서/액추에이터 많을수록 효과 증가
- 6~11개 구역 분할 시 비용 및 효율 최적화 가능
② 지능형 전력 분배
- 퓨즈 박스 가상화
- 전류/전압 모니터링 통한 고장 예측
- 부하 최적화 및 에너지 효율 향상
나) 제조 및 운용 편의성
① 모듈형 설계 및 플러그앤플레이
- 구역별 조립 간소화, 모델 간 부품 호환성 증가
- 새 장치 추가/교체 유연성 확보
② SDV 기반
- 소프트웨어 기반 기능 탑재 용이
- OTA 업데이트 메커니즘 간소화
- ECU 수 100개 이상인 기존 아키텍처의 한계 극복
<참고 자료>
전재욱 교수님, SDV 이해하기(K-MOOC), 성균관대학교 반도체시스템공학과, '24.12.09.~'25.02.28.

Chung-Ang Univ. EEE.