[Programmers] 33. 인공지능 수학 기초 (6): 선형대수 (Linear Algebra) (6): SVD, PCA, 최소제곱법
Programmers dev course
SVD, PCA, 최소제곱법
행렬분해 (3): 특이값 분해: SVD
-
특이값 분해 (SVD: singular value decomposition): 중요
-
LU, QR 분해는 정방행렬에서만 사용이 가능합니다.
-
특이값 분해는 일반적인 행렬에 관한 행렬분해입니다.
-
SVD는 직교분할, 확대축소, 차원변환 등과 관련이 있습니다.
-
- : 인 차원 회전행렬 - 정규직교행렬(열벡터)
- : 인 차원 확대/축소 - 확대/축소 크기에 따른 정렬형태 대각행렬 - 축방향으로 확대/축소
- : 인 n차원 회전행렬 - 정규직교행렬(행벡터)
-
SVD의 의미
- : 입력 차원인 공간에서의 회전
- : 입력 차원인 공간에 대해 축방향으로의 확대축소한 후, 으로차원변환
- : 입력차원인 공간에서의 회전
-
SVD의 활용
- 의 특이값 분해 는 각각 열벡터의 순서대로
행렬 의 열벡터가 어떤 방향으로 강한 응집성을 보이고 있는지를 분석한 것입니다.
- 열벡터를 순서대로 개 취한다면,
강한 응집성을 가지는 개의 방향으로 수선의 발을 내린 의 근사치 를 재구성 할 수 있습니다.
- 영상처리 등에서 많이 쓰입니다.예
=> 응집성이 낮은 것을 버린 결과 => 유의미한 부분을 더 돋보이게 할 수 있습니다.
주성분 분석: (PCA: principal component analysis)
-
다수의 차원 데이터에 대해 데이터의 중심으로부터 데이터의 응집력이 좋은 개의 직교방향을 분석하는 방법입니다.
-
데이터의 공분산행렬(covariance matrix)에 대한 고유값(eigenvalue) 분해에 기반을 둔 직교분해입니다.
-
데이터의 중심 구하기 -> 데이터의 평균
-
가진 임의의 데이터 와 중심간의 벡터의 외적을 통해 차원을 쌓습니다.
- : 차원 회전행렬 - 정규 직교행렬
- : 차원 확대축소 - 대각행렬 고유값이 크면 응집성이 큽니다.
PCA의 활용: 벡터공간의 최소제곱법
집합과 공간
-
집합(Set)
임의의 원소(element)를 수집하여 만든 모임을 말합니다. -
연산에 닫혀있다
집합에 속해있는 원소를 뽑아 연산을 실행항 결과가 다시 그 집합에 속한 경우를 말합니다. -
공간(Space): 다음 두 연산에 닫혀있는 집합을 말합니다.
1. 덧셈 연산에 닫혀있다.
2. 스칼라 곱 연산에 닫혀있다. -
열공간 (column space)
- 행렬 의 열벡터들에 대한 가능한 모든 선형조합의 결과를 모아 집합으로 구성한 공간을 말합니다.
- 해가 있다 : 열공간 내에 있다는 것을 말합니다.
- 해가 없다: 열공간을 벗어난다는 것을 말합니다.
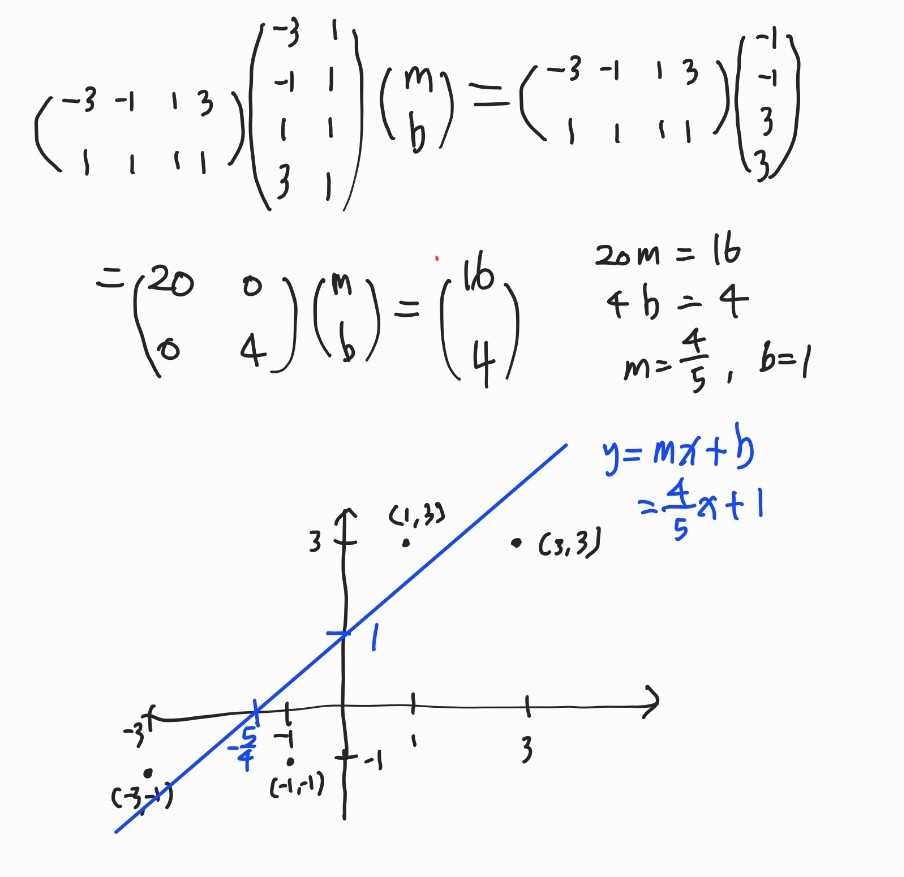
최소제곱법 (least squares method)
-
선형시스템 에 대한 해가 없음에도 불구하고, 가장 가까운 해답(근사해)을 내는 방법입니다.
-
벡터 를 행렬 가 정의하는 열공간으로 투영한 결과를 가장 가까운 답인 로 봅니다.
-
-
목표 와 달성가능한 목표 의 차이를 나타내는 벡터 의 길이를
최소화 시키는 의미를 지니기 때문에 최소제곱법이라고 불립니다.
=>
=>
최소제곱법의 응용: 선형회기 (linear regression)
- 선형시스템 구성
=>- 최소제곱법 적용
SVD, PCA, 최소제곱법 실습해보기
SVD
import numpy as np
A = np.array([[1, 1], [-2, 2], [-1, -1]])
print("A:")
print(A)A:
[[ 1 1]
[-2 2]
[-1 -1]]U: 정규직교행렬(열벡터), UU: 열벡터를 한 개 취함
U = np.array([[1/1.414, 0, 1/1.414], [0, 1, 0], [-1/1.414, 0, 1/1.414]])
UU = U[:,:1]
print("U:")
print(U)
print("UU:")
print(UU)U:
[[ 0.70721358 0. 0.70721358]
[ 0. 1. 0. ]
[-0.70721358 0. 0.70721358]]
UU:
[[ 0.70721358]
[ 0. ]
[-0.70721358]]D: 확대/축소 행렬, DD: 강한 응집성 보이는 열
D = np.array([[4, 0], [0, 1/1.414], [0, 0]])
DD = D[:1,:1]
print("D")
print(D)
print("DD")
print(DD)D
[[4. 0. ]
[0. 0.70721358]
[0. 0. ]]
DD
[[4.]]Vt: 정규직교행렬(행벡터)), VVt: 행벡터 한 개를 취함
Vt = np.array([[1/1.414, 1/1.414], [-1/1.414, 1/1.414]])
VVt = Vt[:1,:]
print("Vt")
print(Vt)
print("VVt")
print(VVt)Vt
[[ 0.70721358 0.70721358]
[-0.70721358 0.70721358]]
VVt
[[0.70721358 0.70721358]]AA:
AA = U @ D @ Vt
print("AA")
print(AA)AA
[[ 2.00060418 2.00060418]
[-0.50015105 0.50015105]
[-2.00060418 -2.00060418]]강한 응집성
UU @ DD @ VVtarray([[ 2.00060418, 2.00060418],
[ 0. , 0. ],
[-2.00060418, -2.00060418]])PCA
import numpy as np
from sklearn.decomposition import PCA
X = np.array([[-1, -1], [-2, -1], [-3, -2], [1, 1], [2, 1], [3, 2]])
pca = PCA(n_components=2)
pca.fit(X)PCA(n_components=2)print(pca.explained_variance_ratio_)[0.99244289 0.00755711]print(pca.singular_values_)[6.30061232 0.54980396]print(pca.components_)[[-0.83849224 -0.54491354]
[ 0.54491354 -0.83849224]]최소제곱법
import numpy as np
A = np.array([[-3, 1], [-1, 1], [1, 1], [3, 1]])
b = np.array([-1, -1, 3, 3])
print('A:', A)
print('b:', b)A: [[-3 1]
[-1 1]
[ 1 1]
[ 3 1]]
b: [-1 -1 3 3]At = A.transpose()
print(At)[[-3 -1 1 3]
[ 1 1 1 1]]- 전치행렬 곱
AtA = At @ A
print(AtA)
Atb = At @ b
print(Atb)
AtA_inv = np.linalg.inv(AtA)
print(AtA_inv)[[20 0]
[ 0 4]]
[16 4]
[[0.05 0. ]
[0. 0.25]]xx = AtA_inv @ Atb
print(xx)[0.8 1. ]- 에서 최소제곱법으로 구한 직선에 수선의 발을 내려 를 구했다.!
bb = A @ xx
print(bb)[-1.4 0.2 1.8 3.4]![]()
이 글은 프로그래머스 스쿨 인공지능 데브코스 과정에서 공부한 내용을 바탕으로 정리한 글입니다.
