Reference: Prof Steve Brunton, Control Bootcamp
Youtube Link
Inverted Pendulum on Cart 시스템의 선형화
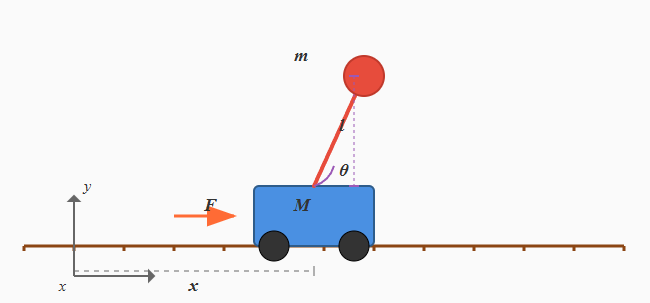
위와 같은 카트에 달린 역진자에 대한 예제를 수행해보자.
상태변수 정의
우리가 사용할 수 있는 상태는 다음과 같다:
x=⎣⎢⎢⎢⎡xx˙=vθθ˙=ω⎦⎥⎥⎥⎤
여기서 시스템의 차원은 다음과 같다:
x∈R4,u∈R1
평형점 (Fixed Point)
평형점은 다음과 같다:
θ=0,πθ˙=0x˙=0x=free
여기서 θ=0은 진자가 위로 세워진 불안정한 평형점이고, θ=π는 진자가 아래로 매달린 안정한 평형점이다.
비선형 상태방정식
힘과 모멘트 평형식을 통해 상태 미분방정식을 도출하면 다음과 같다:
v˙=mL2(M+m(1−cos(θ)2))−m2L2gcosθsinθ+mL2(mLω2sinθ−δv)+mL2u
θ˙=ω
ω˙=mL2(M+m(1−cos(θ)2))(m+M)mgLsin(θ)−mLcos(θ)(mLω2sinθ−δv)+mLcos(θ)u
선형화 과정
제어 시스템 설계를 위해 불안정한 평형점 θ=0 (진자가 위로 세워진 상태) 근처에서 선형화를 수행한다.
선형화 조건:
- x=0,v=0,θ=0,ω=0
이 점에서 다음과 같은 소각도 근사를 사용한다:
- sin(θ)≈θ
- cos(θ)≈1
- θ2≈0 (2차 이상의 고차항 무시)
선형화된 상태공간 모델
상태변수를 다음과 같이 재정의하면:
⎣⎢⎢⎢⎡x1x2x3x4⎦⎥⎥⎥⎤=⎣⎢⎢⎢⎡xvθω⎦⎥⎥⎥⎤
선형화된 시스템:
x˙=Ax+Bu
여기서:
A=⎣⎢⎢⎢⎡00001−Mδ0MLδ0Mmg0−ML(m+M)g0010⎦⎥⎥⎥⎤,B=⎣⎢⎢⎢⎡0M10ML1⎦⎥⎥⎥⎤
시스템의 차원은:
A∈R4×4,B∈R4×1
시스템 매개변수
- M: 카트의 질량 [kg]
- m: 진자의 질량 [kg]
- L: 진자의 길이 [m]
- δ: 감쇠 계수 [N·s/m]
- g: 중력 가속도 [m/s²]
- u: 제어 입력 (카트에 가해지는 힘) [N]
A 행렬의 물리적 의미
A 행렬의 각 원소가 나타내는 물리적 의미:
- A12=1: 위치의 미분은 속도
- A22=−Mδ: 카트의 마찰에 의한 감쇠 효과
- A23=Mmg: 진자의 기울어짐이 카트 가속도에 미치는 영향
- A34=1: 각도의 미분은 각속도
- A42=MLδ: 카트의 마찰이 진자 각가속도에 미치는 영향
- A43=−ML(m+M)g: 중력에 의한 복원 모멘트 (불안정)
B 행렬의 물리적 의미
B 행렬의 각 원소:
- B2=M1: 제어력이 카트 가속도에 미치는 직접적 영향
- B4=ML1: 제어력이 진자 각가속도에 미치는 간접적 영향
시스템의 제어가능성 분석
이 시스템이 제어 가능한지 분석해보자.
제어가능성 행렬(Controllability Matrix)을 구성한다:
C=[BABA2BA3B]
각 항을 계산하면:
B=⎣⎢⎢⎢⎡0M10ML1⎦⎥⎥⎥⎤
AB=⎣⎢⎢⎢⎡M1−M2δ+MLgML1M2Lδ−M2L2(m+M)g⎦⎥⎥⎥⎤
판별 조건:
if rank(C)=4⇒Controllable
else ⇒Noncontrollable
결과: 일반적인 매개변수 값에서 rank(C)=4이므로 이 시스템은 제어가능(Controllable)하다.
물리적 해석
제어가능성의 물리적 의미:
- 제어력 u가 카트에 직접 작용하여 x와 v를 제어
- 카트의 움직임이 진자의 운동에 결합되어 θ와 ω도 간접적으로 제어 가능
- 모든 상태변수가 제어입력의 영향권 내에 있음
제어 설계로의 확장
1. 상태 피드백 제어
가상의 제어입력을 다음과 같이 설정한다:
u=−Kx=−[k1k2k3k4]⎣⎢⎢⎢⎡xvθω⎦⎥⎥⎥⎤
그러면 폐루프 시스템은:
x˙=(A−BK)x
2. LQR (Linear Quadratic Regulator) 제어
성능 지표 함수를 최소화하는 최적 제어:
J=∫0∞(xTQx+uTRu)dt
최적 제어 법칙: u=−Kx (여기서 K는 Riccati 방정식의 해)
3. 극점 배치 (Pole Placement)
폐루프 시스템 A−BK의 고유값을 원하는 위치에 배치하여 시스템 응답 특성을 설계한다.
결론: 역진자 시스템은 제어가능하므로 다양한 제어 기법을 적용하여 안정화할 수 있다.
