1. 영상의 크기변환
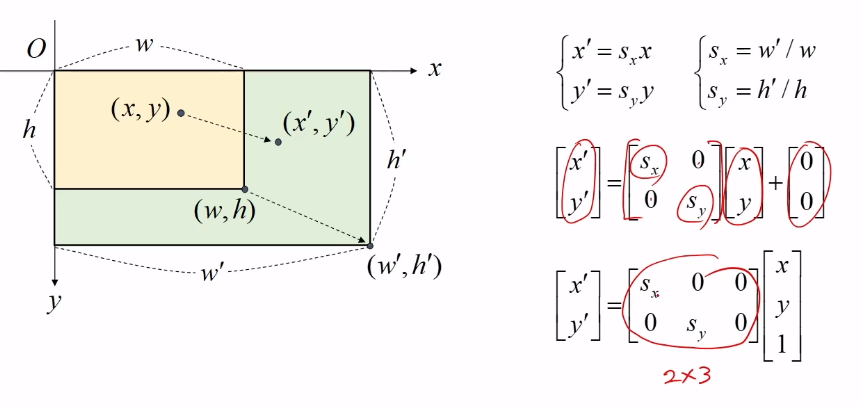
크기변환이란?
- scale transform
- 영상의 크기를 원본보다 크거나 작게 만드는 변한
- x축과 y축 방향으로의 스케일 비율(scale factor)을 지정
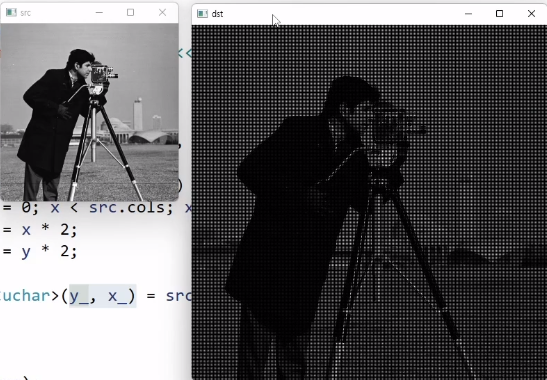
forward mapping(resize1)
-
-
input 이미지를 순회하며 각 픽셀 좌표에 n배한 output 이미지의 픽셀 좌표에 값을 할당하는 방법.
-
비어있는 픽셀 발생 -> 순방향 매핑(forward mapping)의 단점. -> 보간법 필요
void resize1()
{
Mat src = imread("camera.bmp", IMREAD_GRAYSCALE);
if (src.empty()) {
cerr << "Image load failed!" << endl;
return;
}
Mat dst = Mat::zeros(src.rows * 2, src.cols * 2, CV_8UC1);
for (int y = 0; y < src.rows; y++) {
for (int x = 0; x < src.cols; x++) {
int x_ = x * 2;
int y_ = y * 2;
dst.at<uchar>(y_, x_) = src.at<uchar>(y, x);
}
}
imshow("src", src);
imshow("dst", dst);
waitKey();
}backward mapping(resize2)
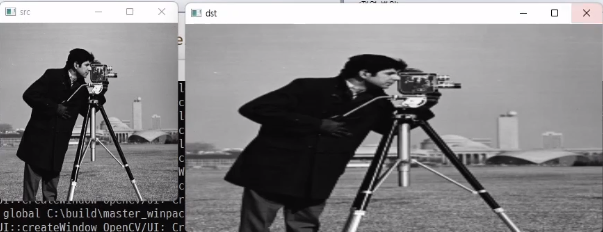
- output 이미지를 순회하며 각 픽셀 위치에 알맞는 원본 이미지의 픽셀값을 할당하는 방법.
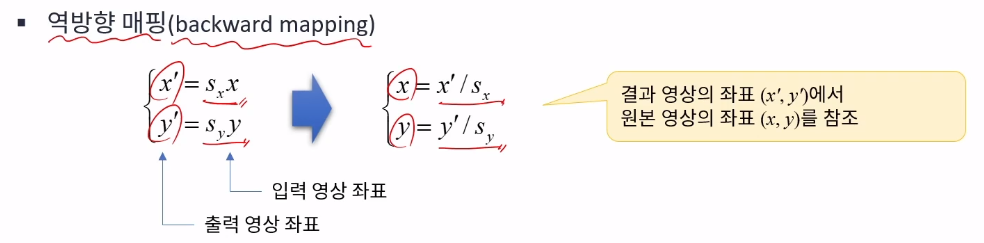

- 화질이 안좋아진다.
void resize2()
{
Mat src = imread("camera.bmp", IMREAD_GRAYSCALE);
if (src.empty()) {
cerr << "Image load failed!" << endl;
return;
}
Mat dst = Mat::zeros(src.rows * 2, src.cols * 2, src.type());
for (int y_ = 0; y_ < dst.rows; y_++) {
for (int x_ = 0; x_ < dst.cols; x_++) {
int x = x_ / 2;
int y = y_ / 2;
dst.at<uchar>(y_, x_) = src.at<uchar>(y, x);
}
}
imshow("src", src);
imshow("dst", dst);
waitKey();
}2. 보간법
- 실수 좌표 상에서의 픽셀 값을 결정하기 위해 주변 픽셀 값을 이용하여 추정하는 방법.
- 보간법의 종류
- 최근방 이웃 보간법(nearest neighbor interpolation)
- 양선형 보간법(bilinear interpolation)
- 3차 보간법(cubic interpolation)
- 스플라인 보간법(spline interpolation)
- 란쵸스 보간법(lanczos interpolation)
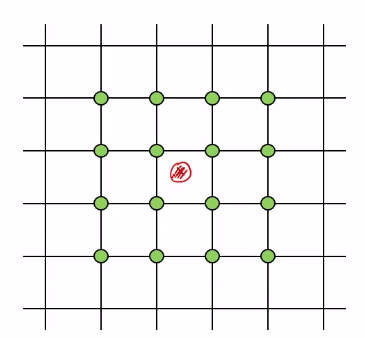
최근방 이웃 보간법
- 가장 가까운 위치에 있는 픽셀값을 참조하는 방법.
- 장점: 뻐ㅏ르고 구현하기 쉬움
- 단점: 계단현상
양선형 보간법
- 실수좌표를 둘러싸고 있는 네개의 픽셀 값에 가중치를 곱한 값들의 선형 합으로 결과 영상의 픽셀값을 구하는 방법
- 최근방 이웃 보간법에 비해 느리지만 계단현상이 크게 감소
- 코드
void resizeBilinear(const Mat& src, Mat& dst, Size size)
{
dst.create(size.height, size.width, CV_8U);
int x1, y1, x2, y2; double rx, ry, p, q, value;
double sx = static_cast<double>(src.cols - 1) / (dst.cols - 1);
double sy = static_cast<double>(src.rows - 1) / (dst.rows - 1);
for (int y = 0; y < dst.rows; y++) {
for (int x = 0; x < dst.cols; x++) {
rx = sx * x; ry = sy * y;
x1 = cvFloor(rx); y1 = cvFloor(ry);
x2 = x1 + 1; if (x2 == src.cols) x2 = src.cols - 1;
y2 = y1 + 1; if (y2 == src.rows) y2 = src.rows - 1;
p = rx - x1; q = ry - y1;
value = (1. - p) * (1. - q) * src.at<uchar>(y1, x1)
+ p * (1. - q) * src.at<uchar>(y1, x2)
+ (1. - p) * q * src.at<uchar>(y2, x1)
+ p * q * src.at<uchar>(y2, x2);
dst.at<uchar>(y, x) = static_cast<uchar>(value + .5);
}
}
}
void resize3()
{
Mat src = imread("camera.bmp", IMREAD_GRAYSCALE);
if (src.empty()) {
cerr << "Image load failed!" << endl;
return;
}
Mat dst;
resizeBilinear(src, dst, Size(600, 300));
imshow("src", src);
imshow("dst", dst);
waitKey();
}- 결과영상
3차 보간법(bicubic interpolation)
- 실수 좌표를 둘러싸고 있는 16개의 픽셀 값에 3차 함수를 이용한 가중치를 부여하여 결과 영상 픽셀의 값을 계산
3. resize()함수 사용하기
void resize(InputArray src, OutputArray dst, Size dsize, double fx= 0, double fy = 0,
int interpolation = INTER_LINEAR);- src, dst: 입력영상, 출력영상
- dsize: 결과영상의 크기 Size()를 지정하지 않으면 fx, fy에 의해 자동결정.
- fx, fy: x와 y방향 스케일 비율.
- interpolation: 보간법 지정 상수
- INTER_NEAREST
- INTER_LINEAR
- INTER_CUBIC
- INTER_LANCZOS4
- INTER_AREA
void resize4()
{
Mat src = imread("rose.bmp");
if (src.empty()) {
cerr << "Image load failed!" << endl;
return;
}
Mat dst1, dst2, dst3, dst4;
resize(src, dst1, Size(), 4, 4, INTER_NEAREST);
resize(src, dst2, Size(1920, 1280));
resize(src, dst3, Size(1920, 1280), 0, 0, INTER_CUBIC);
resize(src, dst4, Size(1920, 1280), 0, 0, INTER_LANCZOS4);
imshow("src", src);
imshow("dst1", dst1(Rect(400, 500, 400, 400)));
imshow("dst2", dst2(Rect(400, 500, 400, 400)));
imshow("dst3", dst3(Rect(400, 500, 400, 400)));
imshow("dst4", dst4(Rect(400, 500, 400, 400)));
waitKey();
}전체실습코드
#include <iostream>
#include "opencv2/opencv.hpp"
using namespace std;
using namespace cv;
void resize1();
void resize2();
void resize3();
void resize4();
int main()
{
// resize1();
// resize2();
// resize3();
resize4();
}
void resize1()
{
Mat src = imread("camera.bmp", IMREAD_GRAYSCALE);
if (src.empty()) {
cerr << "Image load failed!" << endl;
return;
}
Mat dst = Mat::zeros(src.rows * 2, src.cols * 2, CV_8UC1);
for (int y = 0; y < src.rows; y++) {
for (int x = 0; x < src.cols; x++) {
int x_ = x * 2;
int y_ = y * 2;
dst.at<uchar>(y_, x_) = src.at<uchar>(y, x);
}
}
imshow("src", src);
imshow("dst", dst);
waitKey();
}
void resize2()
{
Mat src = imread("camera.bmp", IMREAD_GRAYSCALE);
if (src.empty()) {
cerr << "Image load failed!" << endl;
return;
}
Mat dst = Mat::zeros(src.rows * 2, src.cols * 2, src.type());
for (int y_ = 0; y_ < dst.rows; y_++) {
for (int x_ = 0; x_ < dst.cols; x_++) {
int x = x_ / 2;
int y = y_ / 2;
dst.at<uchar>(y_, x_) = src.at<uchar>(y, x);
}
}
imshow("src", src);
imshow("dst", dst);
waitKey();
}
void resizeBilinear(const Mat& src, Mat& dst, Size size)
{
dst.create(size.height, size.width, CV_8U);
int x1, y1, x2, y2; double rx, ry, p, q, value;
double sx = static_cast<double>(src.cols - 1) / (dst.cols - 1);
double sy = static_cast<double>(src.rows - 1) / (dst.rows - 1);
for (int y = 0; y < dst.rows; y++) {
for (int x = 0; x < dst.cols; x++) {
rx = sx * x; ry = sy * y;
x1 = cvFloor(rx); y1 = cvFloor(ry);
x2 = x1 + 1; if (x2 == src.cols) x2 = src.cols - 1;
y2 = y1 + 1; if (y2 == src.rows) y2 = src.rows - 1;
p = rx - x1; q = ry - y1;
value = (1. - p) * (1. - q) * src.at<uchar>(y1, x1)
+ p * (1. - q) * src.at<uchar>(y1, x2)
+ (1. - p) * q * src.at<uchar>(y2, x1)
+ p * q * src.at<uchar>(y2, x2);
dst.at<uchar>(y, x) = static_cast<uchar>(value + .5);
}
}
}
void resize3()
{
Mat src = imread("camera.bmp", IMREAD_GRAYSCALE);
if (src.empty()) {
cerr << "Image load failed!" << endl;
return;
}
Mat dst;
resizeBilinear(src, dst, Size(600, 300));
imshow("src", src);
imshow("dst", dst);
waitKey();
}
void resize4()
{
Mat src = imread("rose.bmp");
if (src.empty()) {
cerr << "Image load failed!" << endl;
return;
}
Mat dst1, dst2, dst3, dst4;
resize(src, dst1, Size(), 4, 4, INTER_NEAREST);
resize(src, dst2, Size(1920, 1280));
resize(src, dst3, Size(1920, 1280), 0, 0, INTER_CUBIC);
resize(src, dst4, Size(1920, 1280), 0, 0, INTER_LANCZOS4);
imshow("src", src);
imshow("dst1", dst1(Rect(400, 500, 400, 400)));
imshow("dst2", dst2(Rect(400, 500, 400, 400)));
imshow("dst3", dst3(Rect(400, 500, 400, 400)));
imshow("dst4", dst4(Rect(400, 500, 400, 400)));
waitKey();
}
