1. 캐니 엣지 검출 알고리즘
1.1. 좋은 엣지 검출기의 조건
- 정확한 검출: 엣지가 아닌 점을 엣지로 찾거나 또는 엣지를 검출하지 못하는 확률을 최소화
- 정확한 위치: 실제 엣지의 중심을 검출
- 단일 엣지: 하나의 엣지는 하나의 점으로 표현
1.2. 캐니엣지검출법
-
가우시안 필터링(잡음제거목적)
-
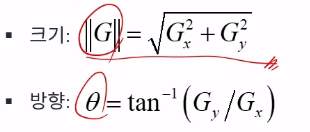
그래디언트 계산(크기&방향)
- sobel mask 사용
- sobel mask 사용
-
non maximum suppression
- 하나의 엣지가 여러개의 픽셀로 표현되는 현상을 없애기 위해 gradient 크기가 local maximum인 픽셀만 엣지픽셀로 설정
- gradient 방향에 위치한 두개의 픽셀과 국지적 최대를 검사

-
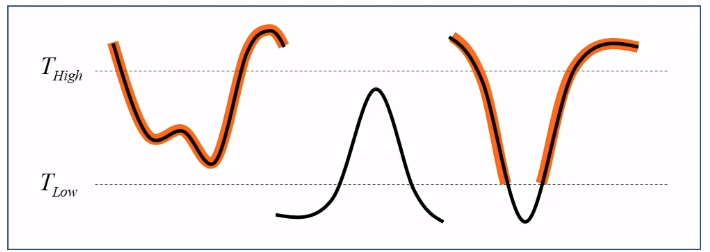
이중임계값을 이용한 히스테리시스 엣지 트래킹
- 두개의 임계값을 사용: T(low), T(high)
- 강한 엣지: 촤종 엣지로 선정
- 약한 엣지: 강한 엣지와 연결된 픽셀만 최종 엣지로 선정
1.3. OpenCV 캐니엣지검출기
void Canny(InputArray image, OutputArray deges, double threshold1, double threshold2,
int apertureSize = 3, bool L2gradient - false);- image: 입력영상
- edges: 엣지영상
- threshold1: 하단 임계값
- threshold2: 상단 임계값
- apertureSize: 소벨 연산을 위한 커널 크기
- L2gradient: L2norm 사용여부.
2. 캐니 엣지 검출기 구현
#include <iostream>
#include "opencv2/opencv.hpp"
#include "mycanny.h"
using namespace std;
using namespace cv;
void myCanny(const Mat& src, Mat& dst, double threshold1, double threshold2)
{
// 1. Gaussian filter
Mat gauss;
GaussianBlur(src, gauss, Size(), 0.5);
// 2. Gradient by Sobel operator
Mat dx, dy;
Sobel(gauss, dx, CV_32F, 1, 0);
Sobel(gauss, dy, CV_32F, 0, 1);
Mat mag = Mat::zeros(src.rows, src.cols, CV_32F);
Mat ang = Mat::zeros(src.rows, src.cols, CV_32F);
for (int j = 0; j < src.rows; j++) {
float* pDx = dx.ptr<float>(j);
float* pDy = dy.ptr<float>(j);
float* pMag = mag.ptr<float>(j);
float* pAng = ang.ptr<float>(j);
for (int i = 0; i < src.cols; i++) {
// magŽÂ ±×·¡µðŸðÆ®ÀÇ Å©±â
pMag[i] = sqrt(pDx[i] * pDx[i] + pDy[i] * pDy[i]);
// angŽÂ ±×·¡µðŸðÆ®ÀÇ ¹æÇâ (°ªÀÌ °¡Àå ±Þ°ÝÇÏ°Ô º¯ÇÏŽÂ ¹æÇâ)
if (pDx[i] == 0)
pAng[i] = 90.f;
else
pAng[i] = float(atan(pDy[i] / pDx[i]) * 180 / CV_PI);
}
}
// 3. Non-maximum suppression
enum DISTRICT { AREA0 = 0, AREA45, AREA90, AREA135, NOAREA };
const int ang_array[] = { AREA0, AREA45, AREA45, AREA90, AREA90, AREA135, AREA135, AREA0 };
const uchar STRONG_EDGE = 255;
const uchar WEAK_EDGE = 128;
vector<Point> strong_edges;
dst = Mat::zeros(src.rows, src.cols, CV_8U);
for (int j = 1; j < src.rows - 1; j++) {
for (int i = 1; i < src.cols - 1; i++) {
// ±×·¡µðŸðÆ® Å©±â°¡ th_lowºžŽÙ Å« ÇÈŒ¿¿¡ ŽëÇØŒžž ±¹ÁöÀû ÃÖŽë °Ë»ç.
// ±¹ÁöÀû ÃÖŽëÀÎ ÇÈŒ¿¿¡ ŽëÇØŒžž °ÇÑ ¿§Áö ¶ÇŽÂ ŸàÇÑ ¿§Áö·Î Œ³Á€.
float mag_value = mag.at<float>(j, i);
if (mag_value > threshold1) {
// ±×·¡µðŸðÆ® ¹æÇâ¿¡ 90µµžŠ ŽõÇÏ¿© ¿§ÁöÀÇ ¹æÇâÀ» °è»ê (4°³ ±ž¿ª)
int ang_idx = cvFloor((ang.at<float>(j, i) + 90) / 22.5f);
// ±¹ÁöÀû ÃÖŽë °Ë»ç
bool local_max = false;
switch (ang_array[ang_idx]) {
case AREA0:
if ((mag_value >= mag.at<float>(j - 1, i)) && (mag_value >= mag.at<float>(j + 1, i))) {
local_max = true;
}
break;
case AREA45:
if ((mag_value >= mag.at<float>(j - 1, i + 1)) && (mag_value >= mag.at<float>(j + 1, i - 1))) {
local_max = true;
}
break;
case AREA90:
if ((mag_value >= mag.at<float>(j, i - 1)) && (mag_value >= mag.at<float>(j, i + 1))) {
local_max = true;
}
break;
case AREA135:
default:
if ((mag_value >= mag.at<float>(j - 1, i - 1)) && (mag_value >= mag.at<float>(j + 1, i + 1))) {
local_max = true;
}
break;구현
}
// °ÇÑ ¿§Áö¿Í ŸàÇÑ ¿§Áö ±žºÐ.
if (local_max) {
if (mag_value > threshold2) {
dst.at<uchar>(j, i) = STRONG_EDGE;
strong_edges.push_back(Point(i, j));
} else {
dst.at<uchar>(j, i) = WEAK_EDGE;
}
}
}
}
}
#define CHECK_WEAK_EDGE(x, y) \
if (dst.at<uchar>(y, x) == WEAK_EDGE) { \
dst.at<uchar>(y, x) = STRONG_EDGE; \
strong_edges.push_back(Point(x, y)); \
}
// 4. Hysterisis edge tracking
while (!strong_edges.empty()) {
Point p = strong_edges.back();
strong_edges.pop_back();
// °ÇÑ ¿§Áö ÁÖº¯ÀÇ ŸàÇÑ ¿§ÁöŽÂ ÃÖÁŸ ¿§Áö(°ÇÑ ¿§Áö)·Î Œ³Á€
CHECK_WEAK_EDGE(p.x + 1, p.y)
CHECK_WEAK_EDGE(p.x + 1, p.y + 1)
CHECK_WEAK_EDGE(p.x, p.y + 1)
CHECK_WEAK_EDGE(p.x - 1, p.y + 1)
CHECK_WEAK_EDGE(p.x - 1, p.y)
CHECK_WEAK_EDGE(p.x - 1, p.y - 1)
CHECK_WEAK_EDGE(p.x, p.y - 1)
CHECK_WEAK_EDGE(p.x + 1, p.y - 1)
}
// ³¡±îÁö ŸàÇÑ ¿§Áö·Î ³²ŸÆÀÖŽÂ ÇÈŒ¿Àº žðµÎ ¿§Áö°¡ ŸÆŽÑ °ÍÀž·Î ÆÇŽÜ.
for (int j = 0; j < src.rows; j++) {
for (int i = 0; i < src.cols; i++) {
if (dst.at<uchar>(j, i) == WEAK_EDGE)
dst.at<uchar>(j, i) = 0;
}
}
}#include <iostream>
#include "opencv2/opencv.hpp"
#include "mycanny.h"
using namespace std;
using namespace cv;
int main()
{
Mat src = imread("circuit.bmp", IMREAD_GRAYSCALE);
if (src.empty()) {
cerr << "Image load failed!" << endl;
return -1;
}
Mat dst1, dst2;
Canny(src, dst1, 50, 150);
myCanny(src, dst2, 50, 150);
imshow("src", src);
imshow("OpenCV Canny", dst1);
imshow("My Canny", dst2);
waitKey();
}