1. ROS 설치
1.1. ROS를 제공하는 software repository 등록
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
cat /etc/apt/sources.list.d/ros-latest.list1.2. ROS apt key setup
sudo apt install curl
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -1.3. ROS 패키지 설치
sudo apt update
sudo apt install ros-melodic-desktop-full1.4. rosdep 초기화
sudo apt install python-rosdep
sudo rosdep init
rosdep update1.5. shell 환경설정
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc1.6. 추가설치
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
pip install rospkg
pip install defusedxml
pip install netifaces1.7. 설치확인
roscore
2. ROS 환경설정
2.1. ros 작업을 위한 workspace 생성
cd
mkdir -p ~/ros_ws/src
cd ros_ws
catkinm_make #build- ros_ws가 ros 작업공간이 된다.
- src: 소스코드를 놓는 곳이다.
- build: 워크스페이스 빌드파일들이 있는 곳이다.
- ros workspace에서 새로운 소스코드 파일이나 패키지가 만들어지면 catkin_make 명령을 통해 빌드 잡업을 진행한다. ros 프로그래밍 작업과 관련있는 모든 것들을 최신 상태로 만드는 작업.
2.2. ROS 작업에 필요한 환경변수 설정
아래 내용을 .bashrc에 작성
alias cm='cd ~/ros_ws && catkin_make'
source /opt/ros/melodic/setup.bash
source ~/ros_ws/devel/setup.bash
export ROS_MASTER_URL=http://localhost:11311
export ROS_HOSTNAME=localhost이 후 source~/.bashrc 명령어 실행하여 시스템에 적용.
3. ROS 예제 프로그램 구동 실습
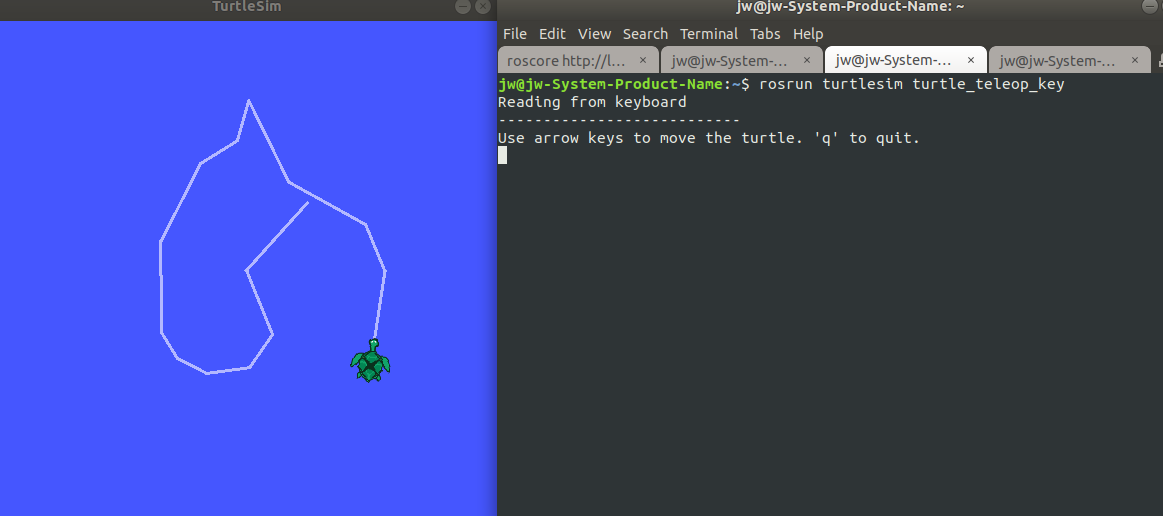
3.1. turtlesim 실습
- 터미널 4개 준비
- 1번 터미널
roscore실행 - 2번 터미널:
rosrun turtlesim turtlesim_node실행 - 3번 터미널:
rosrun turtlesim turtle_teleop_key실행 - 4번 터미널
rosnode list실행

3.2. 토픽 조사
-
4번 터미널:
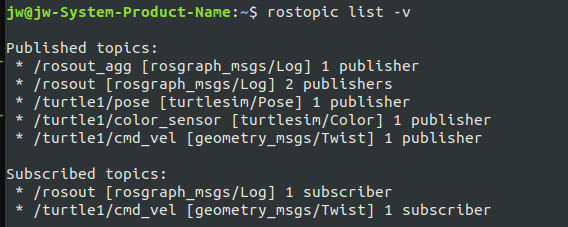
rostopic list실행 -> 발행되는 토픽 리스트를 확인 가능
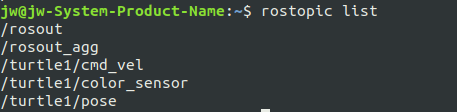
rostopic list -v를 통해 더 자세한 토픽정보 확인 가능
-
4번터미널:
rostopic echo /turtle1/cmd_vel실행- turtle1/cmd_vel 토픽에 담긴 내용을 볼 수 있음
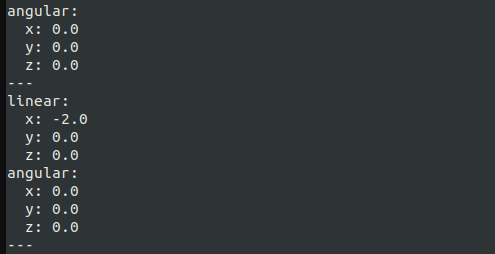
- turtle1/cmd_vel 토픽에 담긴 내용을 볼 수 있음
-
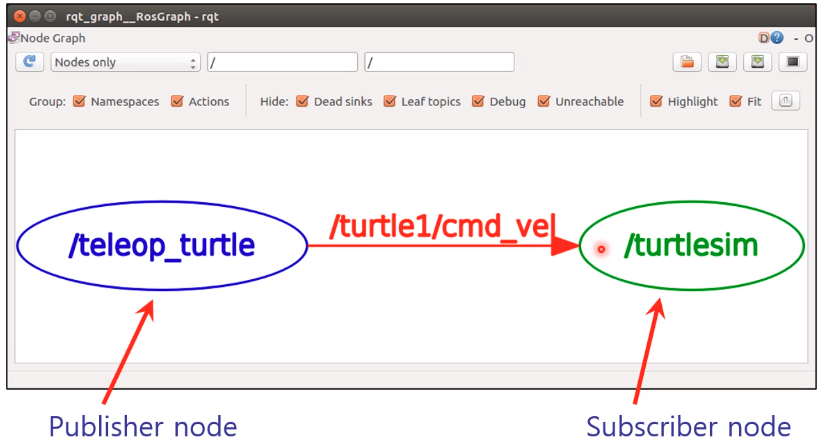
4번 터미널:
rqt_graph명령어를 통해 노드와 토픽 관계를 시각화
-
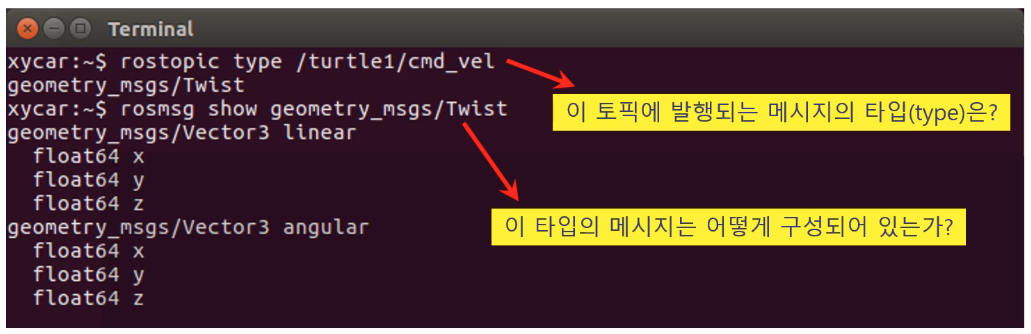
rostopic type /turtle1/cmd_vel명령어로 토픽에 발행되는 메세지의 타입 확인가능 -
rosmsg show geometry_msgs/Twist명령어로 해당 타입의 메세지가 어떻게 구성되어 있는지 확인 가능
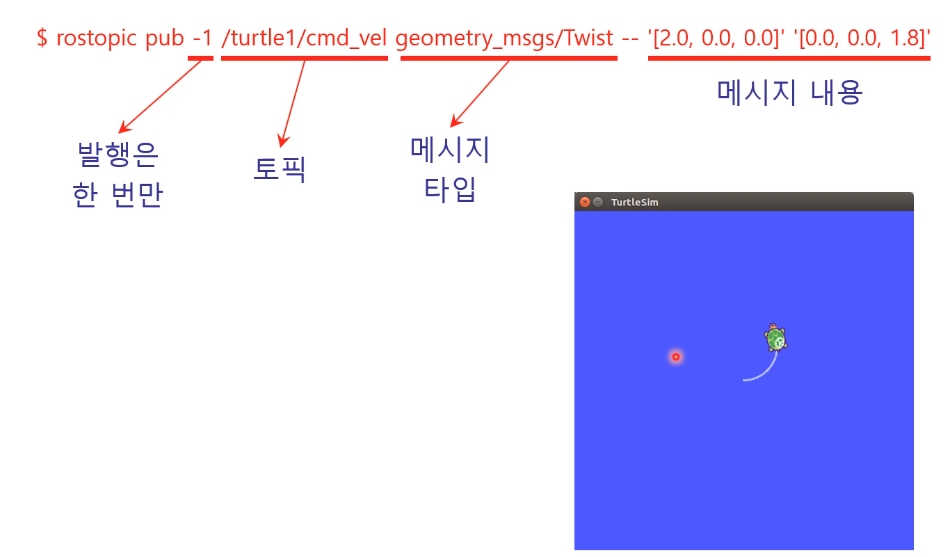
3.3. 토픽을 직접 발행
rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist --'[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]'